You might also like
- CH 5 e Creative SocietyDocument8 pagesCH 5 e Creative SocietyAltamash KhanNo ratings yet
- CH 5 D Creative EnvironmentDocument9 pagesCH 5 D Creative EnvironmentAltamash KhanNo ratings yet
- CH 5 C Management of InnovationsDocument8 pagesCH 5 C Management of InnovationsAltamash KhanNo ratings yet
- CH 3 Creative IntelligenceDocument11 pagesCH 3 Creative IntelligenceAltamash KhanNo ratings yet
- CH 1 Definition of CreativityDocument21 pagesCH 1 Definition of CreativityAltamash KhanNo ratings yet
- CH 5 B Creative Encounters and Creative TeamsDocument8 pagesCH 5 B Creative Encounters and Creative TeamsAltamash Khan100% (1)
- CH 5 A Creative OrganisationDocument14 pagesCH 5 A Creative OrganisationAltamash KhanNo ratings yet
- CH 4 Techniques of Creative Problem SolvingDocument10 pagesCH 4 Techniques of Creative Problem SolvingAltamash KhanNo ratings yet
- Solid EdgeDocument158 pagesSolid EdgeAltamash Khan100% (1)
- CH 2 A Creative PersonalityDocument18 pagesCH 2 A Creative PersonalityAltamash Khan100% (1)
- Strength of Materials 2Document11 pagesStrength of Materials 2Altamash KhanNo ratings yet
- Growth of Motorsports in IndiaDocument9 pagesGrowth of Motorsports in IndiaAltamash KhanNo ratings yet
- Hfed 1Document75 pagesHfed 1Altamash KhanNo ratings yet
- Hfed 5Document2 pagesHfed 5Altamash KhanNo ratings yet
- Strength of Materials 1Document73 pagesStrength of Materials 1Altamash KhanNo ratings yet
- Acid Base TheoriesDocument46 pagesAcid Base TheoriesAltamash KhanNo ratings yet
- Hfed 4Document64 pagesHfed 4Altamash KhanNo ratings yet
- Hfed 2Document93 pagesHfed 2Altamash KhanNo ratings yet
- Phase RuleDocument43 pagesPhase RuleAltamash KhanNo ratings yet
- ColloidsDocument62 pagesColloidsAltamash KhanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ISN SM 50 ManualDocument8 pagesISN SM 50 Manualsinggih bramantyoNo ratings yet
- Iphone 6 Full schematic+IC BoardDocument86 pagesIphone 6 Full schematic+IC BoardSIDNEY TABOADANo ratings yet
- DAILY DRILLING REPORTDocument2 pagesDAILY DRILLING REPORTThế Tài HoàngNo ratings yet
- Why Geomechanical Reservoir KpiDocument43 pagesWhy Geomechanical Reservoir KpiKevin MusterNo ratings yet
- SWOT) Analysis, Marketing Process, Marketing PlanDocument24 pagesSWOT) Analysis, Marketing Process, Marketing PlanSagar Patil100% (2)
- Microstation GuideDocument158 pagesMicrostation GuideMishra KirtiwardhanNo ratings yet
- Preferred Electronic Data Interchange Standards (EDIS) For The Container IndustryDocument51 pagesPreferred Electronic Data Interchange Standards (EDIS) For The Container Industryjuan.vargas.calle6904No ratings yet
- 094fe398236d3d0a-03000EN TCM 12-595611Document204 pages094fe398236d3d0a-03000EN TCM 12-595611Solomon NebiyuNo ratings yet
- Schwab Product Catalogue 2015 (53 - 0112 - 14)Document100 pagesSchwab Product Catalogue 2015 (53 - 0112 - 14)andresboy123No ratings yet
- Bod User ManualDocument2 pagesBod User ManualAshish VermaNo ratings yet
- GLARE - History of The Development of A New Aircraft MaterialDocument229 pagesGLARE - History of The Development of A New Aircraft MaterialklausoshoNo ratings yet
- Marina Pier Repair Nasugbu BatangasDocument28 pagesMarina Pier Repair Nasugbu BatangasDennis SagaoNo ratings yet
- Fuels and Chemicals - Auto Ignition TemperaturesDocument5 pagesFuels and Chemicals - Auto Ignition TemperaturesyoesseoyNo ratings yet
- Wa0040Document3 pagesWa0040cia sin kwangNo ratings yet
- Merkava Siman 3 Merkava MK 3 in IDF Service PaDocument80 pagesMerkava Siman 3 Merkava MK 3 in IDF Service Pasacripal95% (20)
- Project Report - FormatsDocument7 pagesProject Report - Formatsfazela shaukatNo ratings yet
- HVX200 LentesDocument2 pagesHVX200 Lentespink2004No ratings yet
- Bhopal Gas Tragedy Case StudyDocument10 pagesBhopal Gas Tragedy Case StudyAbhijith MadabhushiNo ratings yet
- Design of Coin Sorter Counter Based On MCU: Articles You May Be Interested inDocument5 pagesDesign of Coin Sorter Counter Based On MCU: Articles You May Be Interested inArchana BenkarNo ratings yet
- FUTURE SHOCK by ALVIN TOFFLERDocument5 pagesFUTURE SHOCK by ALVIN TOFFLERgeraldine100% (1)
- 66 67wvh8m8dall BLL-2936104Document50 pages66 67wvh8m8dall BLL-2936104ManunoghiNo ratings yet
- Appointment Reciept GDocument3 pagesAppointment Reciept GSanNo ratings yet
- AbaqusCAE FSI Module Users GuideDocument21 pagesAbaqusCAE FSI Module Users GuideZenghu Han100% (1)
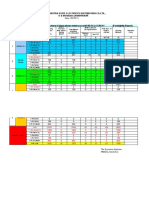
- Maharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARDocument3 pagesMaharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARPuru BornareNo ratings yet
- Notice: Applications, Hearings, Determinations, Etc.: Southern Star Central Gas Pipeline, Inc.Document2 pagesNotice: Applications, Hearings, Determinations, Etc.: Southern Star Central Gas Pipeline, Inc.Justia.comNo ratings yet
- Performance Appraisal Form From IndustryDocument2 pagesPerformance Appraisal Form From IndustryJaspal SinghNo ratings yet
- Engineering Technical Report of The v12 Engine and Related Assignments at Tipco IncDocument36 pagesEngineering Technical Report of The v12 Engine and Related Assignments at Tipco Incapi-244817040No ratings yet
- Bitcoin Thesis FinalDocument18 pagesBitcoin Thesis Finalapi-319365102No ratings yet
- Sl1000 MLT User Guide v1 Key TelephoneDocument24 pagesSl1000 MLT User Guide v1 Key TelephoneRavi Sudharsan0% (1)
- Vanos E36Document68 pagesVanos E36Jorge SepulvedaNo ratings yet