You might also like
- Sound Underwater Images PDFDocument189 pagesSound Underwater Images PDFNanangHadiPurbowoNo ratings yet
- Understanding SONAR: Its History, Types and ApplicationsDocument14 pagesUnderstanding SONAR: Its History, Types and Applicationsmagalhaespaulo565No ratings yet
- Beamforming Basics in SONARDocument22 pagesBeamforming Basics in SONARabhishek100% (2)
- Radio Remote-Control and Telemetry and Their Application to MissilesFrom EverandRadio Remote-Control and Telemetry and Their Application to MissilesRating: 4 out of 5 stars4/5 (1)
- Sonar 2008Document60 pagesSonar 2008sreesree123100% (1)
- SONAR - NavigationDocument25 pagesSONAR - NavigationKarlaColinaNo ratings yet
- Sonar (Sound Navigation and Ranging) : Principle of An Active Sonar - Send and Return PingsDocument15 pagesSonar (Sound Navigation and Ranging) : Principle of An Active Sonar - Send and Return Pingsmonikajoon29No ratings yet
- DSP Project Sonar PresentationDocument27 pagesDSP Project Sonar PresentationThajid Ibna Rouf Uday100% (1)
- SonarDocument11 pagesSonarIzhar Shaikh67% (3)
- Sonar: Presented By: Mike Puato & Neil CorpuzDocument33 pagesSonar: Presented By: Mike Puato & Neil CorpuzMax100% (1)
- Sonar Technology: Measurement and InstrumentationDocument8 pagesSonar Technology: Measurement and InstrumentationMuhammad Haseeb JavedNo ratings yet
- Lesson 10 - Underwater SoundDocument32 pagesLesson 10 - Underwater Soundmuvin236100% (1)
- Understanding SONAR: A Guide to Sound Navigation and RangingDocument27 pagesUnderstanding SONAR: A Guide to Sound Navigation and RangingRalph Lorenz Hortillosa100% (1)
- Side Scan Sonar and Sub-Bottom Profiler SurveyingDocument29 pagesSide Scan Sonar and Sub-Bottom Profiler SurveyingAlfian RomadhoniNo ratings yet
- SonarDocument17 pagesSonarjoshigauta50% (2)
- Basic Sonar System (Active) PDFDocument18 pagesBasic Sonar System (Active) PDFthejerskiNo ratings yet
- Side Scan SonarDocument4 pagesSide Scan SonarMuh ItsnaniNo ratings yet
- 1 History: TitanicDocument24 pages1 History: TitanicChaitanya VarmaNo ratings yet
- SonarDocument323 pagesSonarDhimas Afihandarin100% (1)
- Principles of Underwater AcousticsDocument55 pagesPrinciples of Underwater Acousticsadrianamasa83% (6)
- Underwater Acoustic Noise Measurement of VesselsDocument6 pagesUnderwater Acoustic Noise Measurement of VesselsJohn KaruwalNo ratings yet
- Underwater Acoustic Positioning SystemDocument6 pagesUnderwater Acoustic Positioning SystemalphadingNo ratings yet
- Ship Detection With DVB-T Software Defined Passive RadarDocument3 pagesShip Detection With DVB-T Software Defined Passive RadarAnonymous Pjbdf4wWNo ratings yet
- Passive Forward Scattering Radar Using SDR for UAV Detection and ClassificationDocument33 pagesPassive Forward Scattering Radar Using SDR for UAV Detection and ClassificationtkzNo ratings yet
- Cyient Transmit and Receive Module For Radar SystemsDocument4 pagesCyient Transmit and Receive Module For Radar SystemsPercy100% (1)
- Amazing Growth in Military Radar Antenna TechnologyDocument39 pagesAmazing Growth in Military Radar Antenna Technologyagmnm1962100% (1)
- LBL Acoustic Work InstructionDocument13 pagesLBL Acoustic Work InstructionFranklin HallNo ratings yet
- Submarine Mapping Using Multibeam BathymetryDocument5 pagesSubmarine Mapping Using Multibeam BathymetrySil Alba0% (1)
- Multi-Standard Receiver DesignDocument54 pagesMulti-Standard Receiver DesignWalid_Sassi_TunNo ratings yet
- LidarDocument21 pagesLidarJahankeer MzmNo ratings yet
- Magnetometers and Gadiometers PDFDocument21 pagesMagnetometers and Gadiometers PDFAndreea SavuNo ratings yet
- General Facts About The Lidar TechniqueDocument29 pagesGeneral Facts About The Lidar TechniqueCirkuito100% (1)
- Naval Radar Systems 4 2Document12 pagesNaval Radar Systems 4 2Nishant Pandya100% (1)
- Side Scan Sonar PDFDocument14 pagesSide Scan Sonar PDFSyamaprasad. SNo ratings yet
- Radar & Sonar Detection SystemsDocument27 pagesRadar & Sonar Detection SystemsJose EspinoNo ratings yet
- Lecture - 16 Side Scan Sonar and SBPDocument26 pagesLecture - 16 Side Scan Sonar and SBPTharina Nursalika Adhyati100% (1)
- Acoustic Seafloor MappingDocument18 pagesAcoustic Seafloor MappingmanishbabuNo ratings yet
- Baeam Forming MatlabDocument32 pagesBaeam Forming Matlabvinayak341No ratings yet
- Adaptive Active Phased Array Radar PresentationDocument17 pagesAdaptive Active Phased Array Radar PresentationHarika Kilari50% (2)
- A Simple Pulse Radar SystemDocument5 pagesA Simple Pulse Radar SystemAvinash ReddyNo ratings yet
- Radar BasicsDocument10 pagesRadar BasicsSteve AbonyiNo ratings yet
- Kongsberg - LASAR 5 - Coastal Surveillance SonarDocument2 pagesKongsberg - LASAR 5 - Coastal Surveillance SonarGurit Perdana100% (1)
- Manual Multibeam SonarDocument23 pagesManual Multibeam SonarAyesha MariyaNo ratings yet
- Naval 1Document12 pagesNaval 1Nick NumlkNo ratings yet
- State of The Art of Parameters For Mechanical Design of An Autonomous Underwater VehicleDocument16 pagesState of The Art of Parameters For Mechanical Design of An Autonomous Underwater VehiclehelloyvnNo ratings yet
- Active Loop AntennaDocument2 pagesActive Loop AntennaBengalProNo ratings yet
- B.Tech Mid-Term Project Presentation 2012: Ms - Deepani Rath (ECE200963236)Document18 pagesB.Tech Mid-Term Project Presentation 2012: Ms - Deepani Rath (ECE200963236)mahadevkartikNo ratings yet
- Underwater RoboticsDocument23 pagesUnderwater RoboticsNaman KansalNo ratings yet
- Atlas-Parasound 2008-05Document32 pagesAtlas-Parasound 2008-05adrianamasa50% (2)
- Mechanical Waves and Sound ExplainedDocument46 pagesMechanical Waves and Sound ExplainedPortia A. Egken100% (1)
- SPE 149602 Distributed Acoustic Sensing - A New Way of Listening To Your Well/ReservoirDocument9 pagesSPE 149602 Distributed Acoustic Sensing - A New Way of Listening To Your Well/ReservoirBolsec14No ratings yet
- Multibeam Sonar Imaging GeometryDocument25 pagesMultibeam Sonar Imaging GeometryElfadinda ShawolastingNo ratings yet
- Autonomous Underwater Vehicle (AUV)Document44 pagesAutonomous Underwater Vehicle (AUV)Arjun Pratap Singh100% (1)
- Aperture Coupled Fed Micro-Strip Patch AntennaDocument5 pagesAperture Coupled Fed Micro-Strip Patch AntennaemremiranNo ratings yet
- Gps Receiver Design TutorialDocument3 pagesGps Receiver Design TutorialPete100% (1)
- Bellringer: Explain in Complete SentencesDocument89 pagesBellringer: Explain in Complete SentencesPramod AroteNo ratings yet
- Passive Radar in Base of PBRDocument3 pagesPassive Radar in Base of PBRJaleni OcampoNo ratings yet
- Advanced Radar SystemsDocument20 pagesAdvanced Radar SystemsPramod AroteNo ratings yet
- RC Oscillator PDFDocument5 pagesRC Oscillator PDFSubir MaityNo ratings yet
- Class Test 01Document1 pageClass Test 01Subir MaityNo ratings yet
- CMOS inverter circuit design parameters propagation delayDocument1 pageCMOS inverter circuit design parameters propagation delaySubir MaityNo ratings yet
- Question Paper Template - VLSI LABDocument8 pagesQuestion Paper Template - VLSI LABSubir MaityNo ratings yet
- Derivation of and of A Mosfet: T MAXDocument16 pagesDerivation of and of A Mosfet: T MAXSubir MaityNo ratings yet
- MOSFET Modeling For SimulationDocument21 pagesMOSFET Modeling For SimulationSubir MaityNo ratings yet
- How To Interfacing Sensor With LPC2148 ARMDocument8 pagesHow To Interfacing Sensor With LPC2148 ARMSubir MaityNo ratings yet
- Gateway TutorialDocument7 pagesGateway TutorialSubir MaityNo ratings yet
- Design & Simulation of XOR GateDocument2 pagesDesign & Simulation of XOR GateSubir MaityNo ratings yet
- Gate Array Based DesignDocument6 pagesGate Array Based DesignSubir MaityNo ratings yet
- NanoDocument44 pagesNanoSubir MaityNo ratings yet
- Mos 2Document39 pagesMos 2Subir MaityNo ratings yet
- VcoDocument40 pagesVcoSubir MaityNo ratings yet
- Layout & Design RulesDocument17 pagesLayout & Design RulesSubir MaityNo ratings yet
- CMOS FabricationDocument7 pagesCMOS FabricationSubir MaityNo ratings yet
- Lesson Plan VlsiDocument2 pagesLesson Plan VlsiSubir MaityNo ratings yet
- Short Channel EffectsDocument15 pagesShort Channel Effectsgene_palencia100% (1)
- Touch Screen: Sagar Singha 08182003051 ECE SEMDocument13 pagesTouch Screen: Sagar Singha 08182003051 ECE SEMSubir MaityNo ratings yet
- Derivation of Drain CurrentDocument4 pagesDerivation of Drain CurrentSubir MaityNo ratings yet
- CMOS FabricationDocument7 pagesCMOS FabricationSubir MaityNo ratings yet
- Vlsi Design StyleDocument15 pagesVlsi Design StyleSubir MaityNo ratings yet
- Modification in Thresold VoltDocument4 pagesModification in Thresold VoltSubir MaityNo ratings yet
- CMOS N-Well ProcessDocument7 pagesCMOS N-Well ProcessGregory ThompsonNo ratings yet
- NMOS FabricationDocument21 pagesNMOS FabricationGregory ThompsonNo ratings yet
- Bluetooth Technology: Presentation OnDocument12 pagesBluetooth Technology: Presentation OnSubir MaityNo ratings yet
- Wi - FiDocument20 pagesWi - FiSubir MaityNo ratings yet
- IC FabricationDocument28 pagesIC FabricationSubir MaityNo ratings yet
- HSDPADocument14 pagesHSDPASubir MaityNo ratings yet
- Name-Suvajit Mondal. Stream-E.C.E. Roll No.-3047. Semester-8 - Subject-3G PresentationDocument21 pagesName-Suvajit Mondal. Stream-E.C.E. Roll No.-3047. Semester-8 - Subject-3G PresentationSubir MaityNo ratings yet
- Name: Pratyay Saha. Stream: Electronics & Communication Engineering. Year: 4 - Semester: 8 - Roll No: 08182003048. Registration No: 081820110115Document15 pagesName: Pratyay Saha. Stream: Electronics & Communication Engineering. Year: 4 - Semester: 8 - Roll No: 08182003048. Registration No: 081820110115Subir MaityNo ratings yet
- Propagation of Seismic DisturbancesDocument22 pagesPropagation of Seismic DisturbancesEriane Louise LorenzoNo ratings yet
- Lasers, Lights and Other Technologies: Maria Claudia Almeida Issa Bhertha Tamura EditorsDocument515 pagesLasers, Lights and Other Technologies: Maria Claudia Almeida Issa Bhertha Tamura EditorsSergio BravoNo ratings yet
- Electromagnetic SpectrumDocument17 pagesElectromagnetic SpectrumAviation/Space History Library100% (4)
- Radiation in Everyday LifeDocument32 pagesRadiation in Everyday LifeamitkkambleNo ratings yet
- Spectral Reflectance of Vegetation, Soil and WaterDocument27 pagesSpectral Reflectance of Vegetation, Soil and WaterAbhi83% (6)
- Engg PhysicsDocument62 pagesEngg PhysicsGuruKPONo ratings yet
- 3 Transmission LinesDocument19 pages3 Transmission Linesfathin noorshafirahNo ratings yet
- G2WF-01V: Electrical DataDocument2 pagesG2WF-01V: Electrical Databmc100% (1)
- X-Ray Diffraction in CrystalDocument67 pagesX-Ray Diffraction in CrystalAnonymous BW2VsFifi9No ratings yet
- MARCOMDocument35 pagesMARCOMDrei SalNo ratings yet
- Bessel Beams, Self-Healing, and Diffraction-Free PropagationDocument16 pagesBessel Beams, Self-Healing, and Diffraction-Free Propagationauth.scribd.com.8kx7vNo ratings yet
- Dokumen - Tips - Ray Tube Integration in Shooting and Bouncing Ray MethodDocument4 pagesDokumen - Tips - Ray Tube Integration in Shooting and Bouncing Ray MethodAsd DsaNo ratings yet
- Guidelines On Acoustic Treatments For School BuildingsDocument2 pagesGuidelines On Acoustic Treatments For School BuildingsYean Ghing TongNo ratings yet
- AME Question BankDocument8 pagesAME Question BankBrenda TelferNo ratings yet
- OADM 12I6430 S35A Web ENDocument2 pagesOADM 12I6430 S35A Web ENLuiz Gustavo Santos AlbertoNo ratings yet
- Ejercicios AntenasDocument5 pagesEjercicios AntenasEnrique QuintanaNo ratings yet
- Radiative Cooling by Tailoring Surfaces With Microestructures Asociation of A Grating and A Multi Layer StructureDocument23 pagesRadiative Cooling by Tailoring Surfaces With Microestructures Asociation of A Grating and A Multi Layer StructureIgnacio Álvarez CatalánNo ratings yet
- Unit 2 HW 2 Reflection, Refraction and Diffraction HWDocument30 pagesUnit 2 HW 2 Reflection, Refraction and Diffraction HWMitul KaziNo ratings yet
- 100 TOP ELECTROMAGNETIC FIELD THEORY Questions and Answers PDF ELECTROMAGNETIC FIELD THEORY QuestionsDocument15 pages100 TOP ELECTROMAGNETIC FIELD THEORY Questions and Answers PDF ELECTROMAGNETIC FIELD THEORY QuestionsEr PavankumarNo ratings yet
- Radio CommunicationDocument27 pagesRadio CommunicationHamza SaleemNo ratings yet
- Ultimate Performance Plus: Dual Voice Coil SubwoofersDocument12 pagesUltimate Performance Plus: Dual Voice Coil SubwoofersRPX2000No ratings yet
- X-ray formulas and concepts guideDocument5 pagesX-ray formulas and concepts guideAdil HasanovNo ratings yet
- Understanding Frequencies Through Harmonics AssociationsDocument24 pagesUnderstanding Frequencies Through Harmonics Associations1aquila1100% (2)
- RF Antenna (Radio) : TerminologyDocument19 pagesRF Antenna (Radio) : TerminologyAnshu JhaNo ratings yet
- Stationary WavesDocument11 pagesStationary WavesCarmella Mae QuidiligNo ratings yet
- ReserachreflectionDocument2 pagesReserachreflectionapi-320768951No ratings yet
- 07a1bs03 Engineering PhysicsDocument4 pages07a1bs03 Engineering PhysicsNizam Institute of Engineering and Technology LibraryNo ratings yet
- Physics-E Chapters 31 - 38Document8 pagesPhysics-E Chapters 31 - 38look porrNo ratings yet
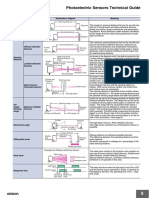
- Photoelectric Sensors Technical Guide ExplainedDocument9 pagesPhotoelectric Sensors Technical Guide ExplainedFahad MohamedNo ratings yet
- DWDM CompleteDocument62 pagesDWDM Completepriyanka joshiNo ratings yet