You might also like
- NanotechnologyDocument15 pagesNanotechnologySweeya Sankuru100% (1)
- Time Series AnalysisDocument49 pagesTime Series AnalysisLars LarsonNo ratings yet
- STAR-CCM+v4.02training Rev3Document351 pagesSTAR-CCM+v4.02training Rev3CvijetinTodorovic100% (1)
- TensorFlow With RDocument46 pagesTensorFlow With RbiondimiNo ratings yet
- Pedestrian Detection - Kristina PicklDocument45 pagesPedestrian Detection - Kristina PicklZulkarnain ZainudinNo ratings yet
- Computing Applications in Mechanical Systems (MATLAB Simulink)Document299 pagesComputing Applications in Mechanical Systems (MATLAB Simulink)lawlawNo ratings yet
- Machine Learning CNNDocument28 pagesMachine Learning CNNabcd efghNo ratings yet
- Cp5191 Machine Learning TechniquesDocument2 pagesCp5191 Machine Learning Techniquesakexample100% (3)
- Convolutional Neural Networks FOR IMAGE CLASSIFICATIONDocument22 pagesConvolutional Neural Networks FOR IMAGE CLASSIFICATIONPrashanth Reddy SamaNo ratings yet
- Object Detection and IdentificationDocument20 pagesObject Detection and Identificationrohith mukkamala67% (3)
- ISYE 8803 - Kamran - M1 - Intro To HD and Functional Data - UpdatedDocument87 pagesISYE 8803 - Kamran - M1 - Intro To HD and Functional Data - UpdatedVida GholamiNo ratings yet
- Wuchwcdeep Learning and Its Application To CV and NLP - 0Document65 pagesWuchwcdeep Learning and Its Application To CV and NLP - 0RamaNo ratings yet
- Human Computation and Computer VisionDocument50 pagesHuman Computation and Computer VisionZaman ParvezNo ratings yet
- IntroductionDocument8 pagesIntroductionpitcizyuj2No ratings yet
- Moving Vehicle Detection: Guide Project MembersDocument23 pagesMoving Vehicle Detection: Guide Project MembersAsmita MahajanNo ratings yet
- Modeling Basics: Compartment Models Dimensional Analysis Stochastic ModelingDocument58 pagesModeling Basics: Compartment Models Dimensional Analysis Stochastic ModelingFredNo ratings yet
- Toward A Blurry Rasterizer: Jacob MunkbergDocument52 pagesToward A Blurry Rasterizer: Jacob MunkbergyurymikNo ratings yet
- Mobility Models and Traces: Wei-Jen Hsu Advised by Dr. Ahmed Helmy Presented in CIS6930 Class, Spring 2008Document38 pagesMobility Models and Traces: Wei-Jen Hsu Advised by Dr. Ahmed Helmy Presented in CIS6930 Class, Spring 2008Linh BreakNo ratings yet
- EEE 6512 Image Processing and Computer VisionDocument43 pagesEEE 6512 Image Processing and Computer VisionArnab DuttaNo ratings yet
- Optimal Multi-Scale Patterns in Time Series Streams: Spiros Papadimitriou Philip S. YuDocument12 pagesOptimal Multi-Scale Patterns in Time Series Streams: Spiros Papadimitriou Philip S. YuaptureincNo ratings yet
- Machine Learning For Astronomy: Rob FergusDocument80 pagesMachine Learning For Astronomy: Rob FergusMastering Zinc OxideNo ratings yet
- Ws0910 Opengl 03 Camera Hidden LineDocument48 pagesWs0910 Opengl 03 Camera Hidden LineGergana IvanovaNo ratings yet
- Equivalence LELEC2285 - CSU44053Document2 pagesEquivalence LELEC2285 - CSU44053Aurélie MaillardNo ratings yet
- Captura de MovimientoDocument6 pagesCaptura de MovimientoWilliam GalindoNo ratings yet
- Coding With OpenCVDocument36 pagesCoding With OpenCVRahul GoradiaNo ratings yet
- On Deep Machine Learning & Time Series Models: A Case Study With The Use of KerasDocument34 pagesOn Deep Machine Learning & Time Series Models: A Case Study With The Use of KerasJorgeMoisesNo ratings yet
- Why Convolutions?: Till Now in MLPDocument38 pagesWhy Convolutions?: Till Now in MLPItokiana valimbavaka RabenantenainaNo ratings yet
- Tensors - Training A Model in Keras - Character Recognition Example - MINSTDocument25 pagesTensors - Training A Model in Keras - Character Recognition Example - MINSTsatitekmNo ratings yet
- Bag of WordsDocument72 pagesBag of WordsjudeNo ratings yet
- Introduction To Support Vector Machines: BTR Workshop Fall 2006Document88 pagesIntroduction To Support Vector Machines: BTR Workshop Fall 2006Helkia PasaribuNo ratings yet
- AML All Merged PDF Class 1 To 8Document423 pagesAML All Merged PDF Class 1 To 8lakshman.haldarNo ratings yet
- Introduction To Support Vector Machines: BTR Workshop Fall 2006Document88 pagesIntroduction To Support Vector Machines: BTR Workshop Fall 2006Anonymous PKVCsGNo ratings yet
- L22a-Đã Chuyển ĐổiDocument65 pagesL22a-Đã Chuyển ĐổiNamNo ratings yet
- Unsupervised Learning of Image Correspondences in Medical Imaging AnalysisDocument65 pagesUnsupervised Learning of Image Correspondences in Medical Imaging AnalysisNamNo ratings yet
- Neural Network BSCDocument32 pagesNeural Network BSCSHIVAS RAINANo ratings yet
- PR Some SolutionsDocument26 pagesPR Some SolutionsBongkyu JeonNo ratings yet
- 39 BGDVHZR 4 S 6 Yl 0Document22 pages39 BGDVHZR 4 S 6 Yl 0MD SHAHBAZNo ratings yet
- Monitorama2015netflixinstanceanalysis 150616190732 Lva1 App6892Document69 pagesMonitorama2015netflixinstanceanalysis 150616190732 Lva1 App6892csy365No ratings yet
- Image Classification Using Convolutional Neural Networks (CNNS)Document61 pagesImage Classification Using Convolutional Neural Networks (CNNS)Golam Moktader DaiyanNo ratings yet
- 09 towardBlurryRasterizerMunkberg BPS2011Document52 pages09 towardBlurryRasterizerMunkberg BPS2011yurymikNo ratings yet
- Cosc309 - Video Clip 01 - IntroductoryDocument44 pagesCosc309 - Video Clip 01 - IntroductoryOmar AustinNo ratings yet
- TT V2 - 1 TIMS AuDocument4 pagesTT V2 - 1 TIMS AuVănThịnhNo ratings yet
- Tarptask 4Document10 pagesTarptask 4Kartik SharmaNo ratings yet
- MachineLearning - Algorithms - TaggedDocument35 pagesMachineLearning - Algorithms - TaggedAnthony CorneauNo ratings yet
- Design and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemDocument8 pagesDesign and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemInternational Journal of computational Engineering research (IJCER)No ratings yet
- Ker As TutorialDocument33 pagesKer As TutorialYoann DragneelNo ratings yet
- Face Detection & Emotion RecognitionDocument26 pagesFace Detection & Emotion RecognitionNishu TiwariNo ratings yet
- Inf5300 v2013 Lecture2 Random 2ppDocument50 pagesInf5300 v2013 Lecture2 Random 2ppajithakalyankrishNo ratings yet
- Lecture 1 DAADocument27 pagesLecture 1 DAAtestNo ratings yet
- Face Recognition Using FacenetDocument46 pagesFace Recognition Using Facenetvasavi collegeNo ratings yet
- CS 664 Slides #7 Visual Motion: Prof. Dan Huttenlocher Fall 2003Document32 pagesCS 664 Slides #7 Visual Motion: Prof. Dan Huttenlocher Fall 2003manik birdiNo ratings yet
- Face Recognition-Based Attendance SystemDocument50 pagesFace Recognition-Based Attendance Systemarunimavijay mNo ratings yet
- Unit IDocument150 pagesUnit Ipolumanohar6No ratings yet
- Conference Template A4 (1) 4Document5 pagesConference Template A4 (1) 4Imad EL MallahiNo ratings yet
- Classification of Hyperspectral ImagesDocument64 pagesClassification of Hyperspectral Imagesuser5 sonkiyaNo ratings yet
- CS6504 (R-13) Uw 2013 RegulationDocument67 pagesCS6504 (R-13) Uw 2013 RegulationkhooniNo ratings yet
- FinalDocument31 pagesFinalहिमांशु कुमारNo ratings yet
- PPTDocument20 pagesPPTHarshNo ratings yet
- Background SubtractionDocument14 pagesBackground Subtractionjuairiya jahanNo ratings yet
- Mobile Computer Vision: Optical Flow and TrackingDocument55 pagesMobile Computer Vision: Optical Flow and Trackingpradeep BNo ratings yet
- 1Document4 pages1Vanessa Mae Ilagan100% (1)
- Machine Learning by Andrew NG Lecture Notes: Vinod Kumar November 7, 2016Document3 pagesMachine Learning by Andrew NG Lecture Notes: Vinod Kumar November 7, 2016KarthikNo ratings yet
- Summary of Pattern Recognition First ChapterDocument4 pagesSummary of Pattern Recognition First ChapterzeeshanNo ratings yet
- Deep Learning: Convolutional Neural Network With Python (Keras and Tensorflow)Document2 pagesDeep Learning: Convolutional Neural Network With Python (Keras and Tensorflow)DominicNo ratings yet
- Batik Classification Using Deep Convolutional NetwDocument8 pagesBatik Classification Using Deep Convolutional NetwNaraNo ratings yet
- Code For BFS Applied On MAP To Reach From Arad To Bucharest. (Artificial Intelligence)Document2 pagesCode For BFS Applied On MAP To Reach From Arad To Bucharest. (Artificial Intelligence)Ahmad Farooq100% (1)
- Neural Networks in Fabric EngineeringDocument18 pagesNeural Networks in Fabric EngineeringVigneshwaran SkNo ratings yet
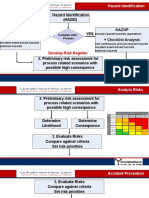
- Hazard Identification (Hazid) NO YES: Checklist Analysis Hazop + Checklist AnalysisDocument7 pagesHazard Identification (Hazid) NO YES: Checklist Analysis Hazop + Checklist AnalysisZeroRecoNo ratings yet
- Artificial Intelligence (A.I) : Submitted byDocument9 pagesArtificial Intelligence (A.I) : Submitted bySubendu RakshitNo ratings yet
- Deep LearningDocument15 pagesDeep LearningAbni SinghNo ratings yet
- PrakashDocument16 pagesPrakashpprakashoNo ratings yet
- Pune University Soft Computing Exam PapersDocument4 pagesPune University Soft Computing Exam PaperspsmeeeNo ratings yet
- 15A05606 Artifical Intelligence PDFDocument1 page15A05606 Artifical Intelligence PDFAnand Virat100% (1)
- Applied Soft ComputingDocument32 pagesApplied Soft ComputingJain Marshel BNo ratings yet
- CPS 4801 Artificial Intelligence: Instructor: Tian (Tina) TianDocument36 pagesCPS 4801 Artificial Intelligence: Instructor: Tian (Tina) TianGuiaki GarciaNo ratings yet
- NN Project2 Brief PDFDocument5 pagesNN Project2 Brief PDFbharathi0% (1)
- Unit I Architectures - Ann: Ee6006 Applied Soft Computing LTPC 3 0 0 3Document1 pageUnit I Architectures - Ann: Ee6006 Applied Soft Computing LTPC 3 0 0 3Raghu RamNo ratings yet
- Machine Learning CS5011 Assignment #2: Dr. B. RavindranDocument8 pagesMachine Learning CS5011 Assignment #2: Dr. B. RavindranAvinash SharmaNo ratings yet
- SeminarDocument19 pagesSeminarBhavna JeengerNo ratings yet
- Google AI Yash Bhatia-1Document5 pagesGoogle AI Yash Bhatia-1Yash BhatiaNo ratings yet
- Language ModellingDocument3 pagesLanguage ModellingPrakash SawantNo ratings yet
- Safety Engineering - Module 1: 5 Days Phse/Safeng1GbDocument2 pagesSafety Engineering - Module 1: 5 Days Phse/Safeng1Gboscar moraNo ratings yet
- Gitex Floorplan New v3Document1 pageGitex Floorplan New v3Abel Varghese DavidNo ratings yet
- Jurnal k3 PDFDocument9 pagesJurnal k3 PDFAnisa Farah FauziyaNo ratings yet
- Naïve Bayes ClassifierDocument17 pagesNaïve Bayes ClassifierZohair AhmedNo ratings yet
- Deep Learning Part 1 (IITM) - Unit 14 - Week 11Document3 pagesDeep Learning Part 1 (IITM) - Unit 14 - Week 11JaiNo ratings yet
- Machine LearningDocument4 pagesMachine LearningonesnoneNo ratings yet
- Recognizing Facial Expressions Through Tracking: Salih Burak GokturkDocument22 pagesRecognizing Facial Expressions Through Tracking: Salih Burak GokturkpavanNo ratings yet