You might also like
- ES826 - Engenharia Simultânea - TrabalhoDocument8 pagesES826 - Engenharia Simultânea - Trabalholnery_1No ratings yet
- ES826 - Engenharia Simultânea - ApresentaçãoDocument10 pagesES826 - Engenharia Simultânea - Apresentaçãolnery_1No ratings yet
- Lab Materiais - Relatório Exp 5Document3 pagesLab Materiais - Relatório Exp 5lnery_1No ratings yet
- Apostila Controle - 24 - Modelos CanônicosDocument33 pagesApostila Controle - 24 - Modelos Canônicoslnery_1No ratings yet
- Apostila Controle - 21 - Avanço e AtrasoDocument32 pagesApostila Controle - 21 - Avanço e Atrasolnery_1No ratings yet
- Lab Materiais - Relatório Exp 4Document2 pagesLab Materiais - Relatório Exp 4lnery_1No ratings yet
- Lab Materiais - Relatório Exp 3Document2 pagesLab Materiais - Relatório Exp 3lnery_1No ratings yet
- Apostila Controle - 25 - Realimentação de EstadoDocument29 pagesApostila Controle - 25 - Realimentação de Estadolnery_1No ratings yet
- Lab Materiais - Relatório Exp 2Document2 pagesLab Materiais - Relatório Exp 2lnery_1No ratings yet
- Lab Materiais - Relatório Exp 1Document4 pagesLab Materiais - Relatório Exp 1lnery_1No ratings yet
- Apostila Controle - 22 - Projeto Avanço / Atraso AnalíticoDocument33 pagesApostila Controle - 22 - Projeto Avanço / Atraso Analíticolnery_1No ratings yet
- Apostila Controle - 23 - Modelagem de EstadoDocument23 pagesApostila Controle - 23 - Modelagem de Estadolnery_1No ratings yet
- Apostila Controle - 15b - Projeto Usando Rlocus (Lugar Das Raízes)Document9 pagesApostila Controle - 15b - Projeto Usando Rlocus (Lugar Das Raízes)lnery_1No ratings yet
- Apostila Controle - 18 - Estabilidade Relativa (MG, MF)Document26 pagesApostila Controle - 18 - Estabilidade Relativa (MG, MF)lnery_1No ratings yet
- Apostila Controle - 20 - Projeto PID AnalíticoDocument37 pagesApostila Controle - 20 - Projeto PID Analíticolnery_1No ratings yet
- Apostila Controle - 09 - Erro EstacionárioDocument33 pagesApostila Controle - 09 - Erro Estacionáriolnery_1No ratings yet
- Apostila Controle - 19a - Visualização Da Estabilidade RelativaDocument27 pagesApostila Controle - 19a - Visualização Da Estabilidade Relativalnery_1No ratings yet
- Apostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)Document21 pagesApostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)lnery_1No ratings yet
- Apostila Controle - 11 - Efeito Dos ControladoresDocument37 pagesApostila Controle - 11 - Efeito Dos Controladoreslnery_1No ratings yet
- Apostila Controle - 15c - Rlocus (Lugar Das Raízes)Document11 pagesApostila Controle - 15c - Rlocus (Lugar Das Raízes)lnery_1No ratings yet
- Apostila Controle - 15 - Desempenho de Sistemas (Domínio Da Frequência) - Nyquist e NicholsDocument29 pagesApostila Controle - 15 - Desempenho de Sistemas (Domínio Da Frequência) - Nyquist e Nicholslnery_1No ratings yet
- Apostila Controle - 16 - Análise de EstabilidadeDocument31 pagesApostila Controle - 16 - Análise de Estabilidadelnery_1No ratings yet
- Apostila Controle - 14 - Desempenho de Sistemas (Domínio Da Frequência) - BodeDocument36 pagesApostila Controle - 14 - Desempenho de Sistemas (Domínio Da Frequência) - Bodelnery_1No ratings yet
- Apostila Controle - 10 - Motor Corrente ContínuaDocument15 pagesApostila Controle - 10 - Motor Corrente Contínualnery_1No ratings yet
- Apostila Controle - 13 - Desempenho de Sistemas (Domínio Do Tempo)Document27 pagesApostila Controle - 13 - Desempenho de Sistemas (Domínio Do Tempo)lnery_1No ratings yet
- Apostila Controle - 08 - Sensores e AtuadoresDocument32 pagesApostila Controle - 08 - Sensores e Atuadoreslnery_1No ratings yet
- Apostila Controle - 12 - Modelagem de DistúrbioDocument32 pagesApostila Controle - 12 - Modelagem de Distúrbiolnery_1No ratings yet
- Apostila Controle - 07 - Integral de Convolução, Função de Transferência e Função Resposta em FrequênciaDocument35 pagesApostila Controle - 07 - Integral de Convolução, Função de Transferência e Função Resposta em Frequêncialnery_1No ratings yet
- Apostila Controle - 06 - Solução de Equações DiferenciaisDocument32 pagesApostila Controle - 06 - Solução de Equações Diferenciaislnery_1No ratings yet
- Slides-Carlos Heuser - Projecto de Banco de DadosDocument32 pagesSlides-Carlos Heuser - Projecto de Banco de DadosadilsoncrenteNo ratings yet
- Processo de Produção do Ácido SulfúricoDocument42 pagesProcesso de Produção do Ácido SulfúricoElyakyn GuimarãesNo ratings yet
- Inventário Das Estações FluviométricasDocument18 pagesInventário Das Estações FluviométricastatianithimottiNo ratings yet
- Aradora 40 DiscosDocument29 pagesAradora 40 DiscosÁlvaro RicardoNo ratings yet
- 08 - Civil - Fechamento de Áreas Com Tapumes - Rev.01Document2 pages08 - Civil - Fechamento de Áreas Com Tapumes - Rev.01marcelaNo ratings yet
- Procedimento para operação de empilhadeirasDocument2 pagesProcedimento para operação de empilhadeirasMauro SantosNo ratings yet
- Ficha 2 TEAT 2020Document3 pagesFicha 2 TEAT 2020Alberto chicava seco50% (2)
- Origem e classificação dos materiais magnéticosDocument41 pagesOrigem e classificação dos materiais magnéticosLucas OliveiraNo ratings yet
- Ensaio A Compressao Madeira FinalDocument7 pagesEnsaio A Compressao Madeira FinalKevinGonçalvesSousaNo ratings yet
- Exercicios Resolvidos Aula 1 PDFDocument17 pagesExercicios Resolvidos Aula 1 PDFEliseteNo ratings yet
- AGROBASE Vagas AtualDocument4 pagesAGROBASE Vagas AtualTiago SilvaNo ratings yet
- Barras anti-pânico ISEO - soluções de aplicaçãoDocument4 pagesBarras anti-pânico ISEO - soluções de aplicaçãoAntonio LantiguaNo ratings yet
- FICHA DE SEGURAN+çA MODELO 04 (IND+ÜSTRIA, OFICINAS E ARMAZ+ëNS)Document5 pagesFICHA DE SEGURAN+çA MODELO 04 (IND+ÜSTRIA, OFICINAS E ARMAZ+ëNS)Daniel AraujoNo ratings yet
- Ciência dos Materiais: Propriedades e Tratamentos TérmicosDocument3 pagesCiência dos Materiais: Propriedades e Tratamentos TérmicosRosi Julio50% (2)
- Elucidando o Estado VibracionalDocument32 pagesElucidando o Estado VibracionalJohn Sue100% (2)
- Riscos carpinteiro análiseDocument3 pagesRiscos carpinteiro análiseKatia SardinhaNo ratings yet
- Creager ExemploDocument6 pagesCreager ExemploRodrigues NetoNo ratings yet
- VRV206ADocument20 pagesVRV206ARenaldo PetlimNo ratings yet
- AR - 01 - MONTAGEM DA TUBULAÇÃO DE OXIGÊNIO NA FOX 7 Gasometro - REV 04Document13 pagesAR - 01 - MONTAGEM DA TUBULAÇÃO DE OXIGÊNIO NA FOX 7 Gasometro - REV 04Márcio MagalhaesNo ratings yet
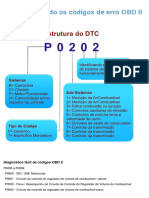
- Compreendendo Os Códigos de Erro OBD IIDocument121 pagesCompreendendo Os Códigos de Erro OBD IIAnderson JúniorNo ratings yet
- Osram - Lampadas CatalogoDocument13 pagesOsram - Lampadas CatalogoEliana CostaNo ratings yet
- Lista de Física 2 com 12 questõesDocument3 pagesLista de Física 2 com 12 questõesMario PachecoNo ratings yet
- Função Trafego Controlado C3000Document12 pagesFunção Trafego Controlado C3000Dioney AfonsoNo ratings yet
- Engenheiro de produção com experiência em manutenção industrialDocument2 pagesEngenheiro de produção com experiência em manutenção industrialCláudio Dos SantosNo ratings yet
- Zinc Clad 61 BR: Proteção anticorrosiva de aço em ambientes agressivosDocument2 pagesZinc Clad 61 BR: Proteção anticorrosiva de aço em ambientes agressivosdark1triggerNo ratings yet
- Catálogo-GP 050 LXDocument6 pagesCatálogo-GP 050 LXLuis Eduardo Zampar FilhoNo ratings yet
- Lista de exercícios de conversão de unidades e problemas de Mecânica dos FluidosDocument3 pagesLista de exercícios de conversão de unidades e problemas de Mecânica dos FluidosGabriela De JesusNo ratings yet
- Apostila de Tratamento de EsgotoDocument237 pagesApostila de Tratamento de EsgotoGustavo Henrique Wanderley100% (3)
- UN 6 - Avaliação Objetiva - Revisão Da TentativaDocument6 pagesUN 6 - Avaliação Objetiva - Revisão Da TentativaFernando SteerNo ratings yet
- DL131 2019Document28 pagesDL131 2019RUIALMEIDASANo ratings yet