You might also like
- Adaptive Distance Relaying Scheme For Transmission Network Connecting Wind FarmsDocument14 pagesAdaptive Distance Relaying Scheme For Transmission Network Connecting Wind FarmsRaghvendra TiwariNo ratings yet
- Soe FDP Ftresm 8feb19Document2 pagesSoe FDP Ftresm 8feb19Raghvendra TiwariNo ratings yet
- Comparison of Matlab PST PSAT and DigSILENT PDFDocument6 pagesComparison of Matlab PST PSAT and DigSILENT PDFRaghvendra TiwariNo ratings yet
- University of New Brunswick: Power Quality-Pq Professor Dr. Adel M. Sharaf. P.Eng. UNB-ECE Dept CanadaDocument116 pagesUniversity of New Brunswick: Power Quality-Pq Professor Dr. Adel M. Sharaf. P.Eng. UNB-ECE Dept CanadaRaghvendra TiwariNo ratings yet
- IET Educational (Stephanie Hay) PDFDocument13 pagesIET Educational (Stephanie Hay) PDFAsim IhsanNo ratings yet
- Ee-301 Network Analysis and Synthesis 2013-14Document4 pagesEe-301 Network Analysis and Synthesis 2013-14Raghvendra TiwariNo ratings yet
- Cost-Effective Residential Energy Efficiency Opportunities for Kauai Island Utility CooperativeDocument45 pagesCost-Effective Residential Energy Efficiency Opportunities for Kauai Island Utility CooperativeRaghvendra TiwariNo ratings yet
- Fuzzy Logic Speed Control of D.C MotorDocument6 pagesFuzzy Logic Speed Control of D.C MotorSuman Mittal100% (1)
- Velocity MeasurementDocument77 pagesVelocity MeasurementRaghvendra TiwariNo ratings yet
- Torque 1Document13 pagesTorque 1Raghvendra TiwariNo ratings yet
- Introduction To Robotics PDFDocument22 pagesIntroduction To Robotics PDFsamurai7_77No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PIC18F87J50Document480 pagesPIC18F87J50Bak SingNo ratings yet
- Low-Power VLSI Design TOCDocument3 pagesLow-Power VLSI Design TOCkipanderson21No ratings yet
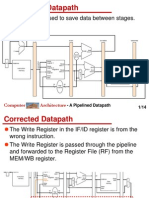
- A Pipelined Datapath: Resisters Are Used To Save Data Between StagesDocument14 pagesA Pipelined Datapath: Resisters Are Used To Save Data Between StagesJohnDaGRTNo ratings yet
- Touch Switch: Presented By, A.CharumathiDocument19 pagesTouch Switch: Presented By, A.Charumathicharumathi4100% (1)
- 8254 - Programmable Interval TimerDocument17 pages8254 - Programmable Interval TimerPraveen Kumar ReddyNo ratings yet
- Design of Handshake Mode With 8255 Using 8086Document10 pagesDesign of Handshake Mode With 8255 Using 8086Rishab Mehta100% (1)
- Design and Implementation of VLSI SystemsDocument45 pagesDesign and Implementation of VLSI SystemsLê Bá Phước LongNo ratings yet
- Logic Synthesis - WikipediaDocument4 pagesLogic Synthesis - WikipediasukhoiNo ratings yet
- A Simple Closed Loop DC Motor Speed Control System On Fpga Platform For VHDL BeginnerDocument4 pagesA Simple Closed Loop DC Motor Speed Control System On Fpga Platform For VHDL BeginnerRick100% (1)
- Advanced Digital Logic Design: Sunggu LeeDocument41 pagesAdvanced Digital Logic Design: Sunggu Lee王小傑No ratings yet
- SMD Resistor CodesDocument2 pagesSMD Resistor CodesJason Lewis50% (2)
- 8051 Microcontroller (2 Marks - Question Bank)Document13 pages8051 Microcontroller (2 Marks - Question Bank)Dr. N.Shanmugasundaram97% (34)
- C2 - Simplifying Logic Circuits Using Theorems-NTHai-2-2020Document6 pagesC2 - Simplifying Logic Circuits Using Theorems-NTHai-2-2020Duc NguyenNo ratings yet
- Types of Computer BusesDocument16 pagesTypes of Computer BusesIan Conan JuanicoNo ratings yet
- Nte2547 D1414 DARLINGTON DRIVER PDFDocument2 pagesNte2547 D1414 DARLINGTON DRIVER PDFcriman45No ratings yet
- 4-Bit AdderDocument27 pages4-Bit AdderZulfiqar AliNo ratings yet
- Kenneth R. Laker, University of PennsylvaniaDocument32 pagesKenneth R. Laker, University of Pennsylvaniasachin rajputNo ratings yet
- Dec Exp 2 Student Manual PDFDocument4 pagesDec Exp 2 Student Manual PDFS M AkashNo ratings yet
- Implementing Moore and Mealy FSMs on FPGADocument14 pagesImplementing Moore and Mealy FSMs on FPGAShashwat PatelNo ratings yet
- Tabela Top 2048Document106 pagesTabela Top 2048edsdoNo ratings yet
- Kingston Khx3200c16d4 8gxDocument3 pagesKingston Khx3200c16d4 8gxAlejandro GonzalezNo ratings yet
- Cis5100 hw3 F20Document4 pagesCis5100 hw3 F20Oliver BaileyNo ratings yet
- Module - 3 EMSDocument68 pagesModule - 3 EMSshivakeshichoupiriNo ratings yet
- MAX803/MAX809/ MAX810 3-Pin Microprocessor Reset Circuits: General Description Benefits and FeaturesDocument8 pagesMAX803/MAX809/ MAX810 3-Pin Microprocessor Reset Circuits: General Description Benefits and FeaturesMaria TzagarakiNo ratings yet
- Low Power Design of CMOS CircuitsDocument45 pagesLow Power Design of CMOS CircuitsvpsampathNo ratings yet
- Chapter 5 Synchronous Sequential CircuitDocument73 pagesChapter 5 Synchronous Sequential CircuitBirukNo ratings yet
- PCB Lab ManualDocument16 pagesPCB Lab Manualtrivedi_urvi9087No ratings yet
- HDILayer StackupsDocument17 pagesHDILayer StackupsAnthonyNo ratings yet
- Erik Brunvand - Digital VLSI Chip Design With Cadence and Synopsys CAD Tools (2006)Document425 pagesErik Brunvand - Digital VLSI Chip Design With Cadence and Synopsys CAD Tools (2006)WilsonNo ratings yet
- 2018 Winter Model Answer PaperDocument26 pages2018 Winter Model Answer PaperParth patkarNo ratings yet