You might also like
- Mechanics I (Statics) Ch-1Document41 pagesMechanics I (Statics) Ch-1ayubisme2No ratings yet
- Engineering Mechanics (Statics)Document32 pagesEngineering Mechanics (Statics)fahimNo ratings yet
- AttachmentDocument20 pagesAttachmentyohannisyohannis54No ratings yet
- Engineering Mechanics I (Stat) Handout-1-14Document14 pagesEngineering Mechanics I (Stat) Handout-1-14Hamlity SaintataNo ratings yet
- Statics Note Dawit's PDFDocument59 pagesStatics Note Dawit's PDFDawit GebrehanaNo ratings yet
- 1.1 Introduction To DynamicsDocument5 pages1.1 Introduction To DynamicsKaren MenesesNo ratings yet
- 1 Comp PhyDocument36 pages1 Comp PhyThatukuru LakshmanNo ratings yet
- Chapter IDocument12 pagesChapter InvnrevNo ratings yet
- Engineering Mechanics I Lecture NoteDocument62 pagesEngineering Mechanics I Lecture NoteMesgina G-herNo ratings yet
- Statics Note Abraham'sDocument62 pagesStatics Note Abraham'sAklilu NegaNo ratings yet
- Class 1Document6 pagesClass 1poojab8017No ratings yet
- Chapter 1Document24 pagesChapter 1Yordanos AbebawNo ratings yet
- EEE - 2105 - L1 To 2Document20 pagesEEE - 2105 - L1 To 2KISAKYE MOSESNo ratings yet
- Applied Mechanics FundamentalsDocument82 pagesApplied Mechanics FundamentalsUmer RazaqNo ratings yet
- Engineering MechanicsDocument112 pagesEngineering Mechanicsch pavan kumarNo ratings yet
- Statics NoteDocument47 pagesStatics NoteJibril omarNo ratings yet
- Chapter 1Document14 pagesChapter 1abadittadesseNo ratings yet
- Chapter1 PDFDocument33 pagesChapter1 PDFObsa KassahunNo ratings yet
- Ss 1 Further Mathematics Vectors Lesson 7Document2 pagesSs 1 Further Mathematics Vectors Lesson 7Adio Babatunde Abiodun Cabax100% (1)
- Lecture Week 1 and 2 - MEG 214Document43 pagesLecture Week 1 and 2 - MEG 214Jerry EssenNo ratings yet
- Addis Ababa University Faculty of Technology Department of Civil EngineeringDocument63 pagesAddis Ababa University Faculty of Technology Department of Civil EngineeringZi BogaleNo ratings yet
- ch-1 Introduction To Engineering Mechanics1Document24 pagesch-1 Introduction To Engineering Mechanics1Nikodimos BacosNo ratings yet
- Engineering MechanicsDocument18 pagesEngineering MechanicsRaj ManovaNo ratings yet
- ME211 Week1Document14 pagesME211 Week1bm7gyygjtfNo ratings yet
- Two Dimensional Force SystemDocument50 pagesTwo Dimensional Force SystemLinux WorldNo ratings yet
- Chapter 1 Basic of StaticsDocument42 pagesChapter 1 Basic of StaticsTewodros AliNo ratings yet
- Mechanics - Notes - Improved (1) - 1Document65 pagesMechanics - Notes - Improved (1) - 1MUSIBIRA PAULNo ratings yet
- Engineering Mechanics: Statics Lecture 1 PDFDocument16 pagesEngineering Mechanics: Statics Lecture 1 PDFKhalid YousafNo ratings yet
- Statics and Dynamics in Petroleum EngineeringDocument9 pagesStatics and Dynamics in Petroleum Engineeringملاك محمدNo ratings yet
- Revision- Statics FundamentalsDocument95 pagesRevision- Statics FundamentalsJohn SmithNo ratings yet
- Summarized Notes of Engineering Mechanics OneDocument64 pagesSummarized Notes of Engineering Mechanics OneRogers BenjaminNo ratings yet
- Engineering MechanicsDocument100 pagesEngineering MechanicsShahzeb Karamat100% (2)
- Chapter One Scalar and VectorsDocument9 pagesChapter One Scalar and VectorsHenok GirmaNo ratings yet
- Banke OjuigoDocument3 pagesBanke Ojuigolovemhiz431No ratings yet
- ME111 Engineering Mechanics: StaticsDocument57 pagesME111 Engineering Mechanics: StaticsAli AhmadNo ratings yet
- Engineering Mechanics For Civil Engr.Document112 pagesEngineering Mechanics For Civil Engr.Clara Ogladit100% (1)
- VectorsDocument39 pagesVectorsAli AsaadNo ratings yet
- Engineering Mechanics NotesDocument100 pagesEngineering Mechanics NotesRagothsingh Ramadoss67% (3)
- Engineering Mechanics NotesDocument162 pagesEngineering Mechanics NotesvsanthanamNo ratings yet
- Engineering Mechanics Dynamics Summer CourseDocument60 pagesEngineering Mechanics Dynamics Summer CourseLeo KhanNo ratings yet
- EM PPT II SemDocument398 pagesEM PPT II SemsridharanNo ratings yet
- Motion in A Plane Class 11 Notes Physics Chapter 4 - Learn CBSEDocument14 pagesMotion in A Plane Class 11 Notes Physics Chapter 4 - Learn CBSEbibinNo ratings yet
- MEC420 Chapter 1 - Part 1 - StudentDocument31 pagesMEC420 Chapter 1 - Part 1 - StudentMuhammad Azizi bin Abd AzizNo ratings yet
- Motion in a Plane Class 11 NotesDocument12 pagesMotion in a Plane Class 11 Notessrija vijjapuNo ratings yet
- Engineering Mechanics EssentialsDocument76 pagesEngineering Mechanics EssentialsGophop HdudNo ratings yet
- AD01 - Basic Concepts in DynamicsDocument9 pagesAD01 - Basic Concepts in DynamicscooLkiD1412No ratings yet
- Static and Dynamic Chapter 1: IntroductionDocument28 pagesStatic and Dynamic Chapter 1: IntroductionDavid HuiNo ratings yet
- ScalarDocument1 pageScalarjaydeep banneNo ratings yet
- Vector and Tensor Analysis with ApplicationsFrom EverandVector and Tensor Analysis with ApplicationsRating: 4 out of 5 stars4/5 (10)
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Problems and Worked Solutions in Vector AnalysisFrom EverandProblems and Worked Solutions in Vector AnalysisRating: 4 out of 5 stars4/5 (1)
- Catalog 40 Spare PartsDocument54 pagesCatalog 40 Spare PartsMiticaVladNo ratings yet
- Short Courses Modelling and Computation of Multiphase FlowsDocument4 pagesShort Courses Modelling and Computation of Multiphase FlowsKaushik SarkarNo ratings yet
- Img 20180122 0001 PDFDocument2 pagesImg 20180122 0001 PDFAnonymous vtZNXtACNo ratings yet
- Modelling, Identification and Control of A 2 DOF Helicopter PrototypeDocument6 pagesModelling, Identification and Control of A 2 DOF Helicopter PrototypeosdacavNo ratings yet
- Din 5480-1Document24 pagesDin 5480-1asd50% (2)
- Genuine: Choose Every Time!Document40 pagesGenuine: Choose Every Time!DinamikaMarine50% (2)
- DT - Hardness TestDocument30 pagesDT - Hardness TestSamuel Christian GiovanniNo ratings yet
- FVD SeminarDocument2 pagesFVD Seminaranand_316764947No ratings yet
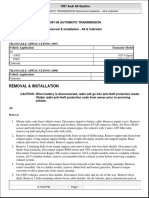
- Auto Trans Removal and Install 97-98 PDFDocument8 pagesAuto Trans Removal and Install 97-98 PDFxstyle123No ratings yet
- Chapter 71 - Power Plant: BHT-412-CR&O-6Document40 pagesChapter 71 - Power Plant: BHT-412-CR&O-6252nd PAS100% (1)
- Design and Development of Car Suspension Lower Arm: December 2015Document8 pagesDesign and Development of Car Suspension Lower Arm: December 2015Sami Onur VuralNo ratings yet
- Fluid StaticsDocument53 pagesFluid StaticsUsama AlameedyNo ratings yet
- Redox Breaker + Hour MeterDocument6 pagesRedox Breaker + Hour Meterhenry vegaNo ratings yet
- Cane Shredder 2Document9 pagesCane Shredder 2Dirajen Pullay MardayNo ratings yet
- Carbon-Carbon CompositesDocument12 pagesCarbon-Carbon CompositesSONU KUMARNo ratings yet
- Structural Design 1: Module inDocument4 pagesStructural Design 1: Module inkangkongNo ratings yet
- Catalogo Completo Flojet Pompe Pumps Bombas Catalogue Xylem Tem SRL ItaliaDocument81 pagesCatalogo Completo Flojet Pompe Pumps Bombas Catalogue Xylem Tem SRL ItaliaDiana GoriNo ratings yet
- High Pressure Gear Pump GuideDocument12 pagesHigh Pressure Gear Pump GuideMauricio Ariel H. OrellanaNo ratings yet
- PC2000-8 Shop ManualDocument1,348 pagesPC2000-8 Shop ManualPeetNo ratings yet
- WegaconceptDocument76 pagesWegaconceptSvitaho ImportNo ratings yet
- EFM Ch6Document67 pagesEFM Ch6marquitosgarciNo ratings yet
- Abrasive Wear Mechanisms PDFDocument9 pagesAbrasive Wear Mechanisms PDFRBZNo ratings yet
- Gears PresentationDocument33 pagesGears PresentationNaveen YadavNo ratings yet
- LK Ign, ElectricalDocument193 pagesLK Ign, ElectricalPIKO MOBNo ratings yet
- 2008 BevanphdDocument194 pages2008 Bevanphdrajm100% (1)
- Hyperbolic ShellsDocument42 pagesHyperbolic ShellshythamNo ratings yet
- SPC Platina 125 Disc (2018 12 28)Document70 pagesSPC Platina 125 Disc (2018 12 28)Willy Mansilla A100% (1)
- Caja Transferencia Jeep Grand Cherokee Laredo 1993 4.0LDocument120 pagesCaja Transferencia Jeep Grand Cherokee Laredo 1993 4.0LGermán BustamanteNo ratings yet
- Thermal Breakage and Impact Strength of Tempered GlassDocument7 pagesThermal Breakage and Impact Strength of Tempered GlassMartinBalanagNo ratings yet