You might also like
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Runyankore-Rukiga Dictionary Launch: President Yoweri Museveni's SpeechDocument28 pagesRunyankore-Rukiga Dictionary Launch: President Yoweri Museveni's SpeechThe New Vision50% (2)
- EXP4 The Diels Alder ReactionsDocument3 pagesEXP4 The Diels Alder ReactionsLaura GuidoNo ratings yet
- Cross Talk Details and RoutingDocument29 pagesCross Talk Details and RoutingRohith RajNo ratings yet
- PIX4D Simply PowerfulDocument43 pagesPIX4D Simply PowerfulJUAN BAQUERONo ratings yet
- Lect 3 Transfer Function of Mechanical SystemsDocument35 pagesLect 3 Transfer Function of Mechanical SystemsKrushnasamy SuramaniyanNo ratings yet
- 2.4-Rotational Mechanical System Transfer Functions: Table 3Document5 pages2.4-Rotational Mechanical System Transfer Functions: Table 3طه حسن شاكر محمودNo ratings yet
- Chapter Two: Mathematical Modeling of Physical SystemsDocument29 pagesChapter Two: Mathematical Modeling of Physical SystemsWabe KemalNo ratings yet
- DS - Lec 1Document7 pagesDS - Lec 1Sherif SaidNo ratings yet
- Week 1 Vibration IntroductionDocument22 pagesWeek 1 Vibration IntroductionSaya SantornoNo ratings yet
- Department of Mechanical Engineering Dynamics of MachineryDocument35 pagesDepartment of Mechanical Engineering Dynamics of Machinerypraveen ajithNo ratings yet
- Chap 2 2 Mech Sys 2Document49 pagesChap 2 2 Mech Sys 2Furkan DedeNo ratings yet
- Class 5 Mechanical Systems (Both Translation and Rotational)Document22 pagesClass 5 Mechanical Systems (Both Translation and Rotational)Acharya Mascara PlaudoNo ratings yet
- Mechanical Systems 3Document34 pagesMechanical Systems 3sidkhan1No ratings yet
- Mechanical Vibration Lab: Faculty of Engineering Mechanical Engineering DepartmentDocument64 pagesMechanical Vibration Lab: Faculty of Engineering Mechanical Engineering DepartmentMuhammad Haris KhanNo ratings yet
- Robotics: Kinematics, Dynamics and Motion Control Module - 5 VITDocument60 pagesRobotics: Kinematics, Dynamics and Motion Control Module - 5 VITHarisankar R N R 21BRS1524No ratings yet
- Dynamic Systems, Modeling & Simulation: Mathematical Model of Physical SystemsDocument35 pagesDynamic Systems, Modeling & Simulation: Mathematical Model of Physical SystemsKerem Yaman100% (1)
- Week 3&4Document24 pagesWeek 3&4Yahya MateenNo ratings yet
- Ave3101 Acs Week3Document60 pagesAve3101 Acs Week3Tuğrul YazganNo ratings yet
- Rotation Review Model and SimulationDocument3 pagesRotation Review Model and SimulationvernNo ratings yet
- ME 3507: Theory of Machines: Dr. Faraz JunejoDocument45 pagesME 3507: Theory of Machines: Dr. Faraz JunejoArsal AbbasNo ratings yet
- University Institute of Engineering Department MechanicalDocument35 pagesUniversity Institute of Engineering Department MechanicalKhushi bhandariNo ratings yet
- 02 Introduction To Shock and VibrationDocument34 pages02 Introduction To Shock and Vibrationkostarica123100% (1)
- Control 1 NotesDocument14 pagesControl 1 NotesGatheru NjorogeNo ratings yet
- 081 - ME8594, ME6505 Dynamics of Machines - 2 MarksDocument20 pages081 - ME8594, ME6505 Dynamics of Machines - 2 Markssara vanaNo ratings yet
- ME313 Introduction & DOF-1Document8 pagesME313 Introduction & DOF-1Ok SokNo ratings yet
- Degree of FreedomDocument8 pagesDegree of Freedommuddassir razzaqNo ratings yet
- Dynamics of Machinery Oral Question BankDocument22 pagesDynamics of Machinery Oral Question BankSurajKahateRajputNo ratings yet
- Mechanism BookDocument118 pagesMechanism BookothmanNo ratings yet
- Me2302 DomDocument13 pagesMe2302 DomLogesh BabuNo ratings yet
- Hoke's JointDocument10 pagesHoke's JointAkash AgarwalNo ratings yet
- Lec 4 Rotational Mechanical SystemDocument14 pagesLec 4 Rotational Mechanical SystemFelopateer EmadNo ratings yet
- Department of Mechanical EngineeringDocument19 pagesDepartment of Mechanical EngineeringVinay KedhariNo ratings yet
- Dynamics of Machinery 2 Marks PDFDocument14 pagesDynamics of Machinery 2 Marks PDFThilli KaniNo ratings yet
- Acceleration Is: Fixed Point Point Fixed Point Point Fixed PointDocument4 pagesAcceleration Is: Fixed Point Point Fixed Point Point Fixed PointVijayKumarMNo ratings yet
- Stability Slide 2Document46 pagesStability Slide 2iriseugeneNo ratings yet
- Mechanics of Rigid BodyDocument21 pagesMechanics of Rigid Bodyhenzel espinaNo ratings yet
- Dom 2 MarkDocument34 pagesDom 2 MarkJaya RajNo ratings yet
- 2 Marks Dynamics of MachineryDocument36 pages2 Marks Dynamics of MachineryMartin De Boras PragashNo ratings yet
- Model of Physical SystemsDocument12 pagesModel of Physical SystemsGurshaan SinghNo ratings yet
- Chapter 7 - Momentum: A Description of Translational Motion For Multi-Body SystemsDocument121 pagesChapter 7 - Momentum: A Description of Translational Motion For Multi-Body SystemsManjunath AithalNo ratings yet
- Dynamics of Machines Two MarksDocument13 pagesDynamics of Machines Two MarksJegan ParamasivamNo ratings yet
- Km20203 - Mekanik Mesin: Md. Mizanur RahmanDocument64 pagesKm20203 - Mekanik Mesin: Md. Mizanur RahmanronaldoNo ratings yet
- Mathematical Modeling of Mechanical Systems: MTS-362 Control Engineering Spring 2011Document54 pagesMathematical Modeling of Mechanical Systems: MTS-362 Control Engineering Spring 2011usman_mani_7No ratings yet
- CE - Lec 4Document34 pagesCE - Lec 4Sumran ShahidNo ratings yet
- Chapter TwoDocument32 pagesChapter TwowabdushukurNo ratings yet
- Mechanic Experi̇mentsDocument26 pagesMechanic Experi̇mentsCANGONo ratings yet
- The Equivalent Solution Is A Mathematical Technique Used in Vibration Engineering To Simplify The Analysis of Complex Vibrating SystemsDocument4 pagesThe Equivalent Solution Is A Mathematical Technique Used in Vibration Engineering To Simplify The Analysis of Complex Vibrating SystemsReinhart Levin Russ NicolasNo ratings yet
- Summary of Topic Covered in ECE408Document89 pagesSummary of Topic Covered in ECE408Nishikata ManipolNo ratings yet
- Lecture 1 SD Introduction 2023Document52 pagesLecture 1 SD Introduction 2023Uttam KarkeeNo ratings yet
- 18md09-Dom Module-1 Part-A-Answer Key PDFDocument7 pages18md09-Dom Module-1 Part-A-Answer Key PDFUdhaya KumarNo ratings yet
- 12101dep-Notice 04242021Document104 pages12101dep-Notice 04242021ahmed titoNo ratings yet
- Lecture 2Document30 pagesLecture 2abdul bariNo ratings yet
- Theory of Machines & Mechanisms MCT 2212Document33 pagesTheory of Machines & Mechanisms MCT 2212MUKABBIR AHAMED RAFAT 1703119No ratings yet
- Dynamics of MachinesDocument102 pagesDynamics of MachinesVinay KedhariNo ratings yet
- Handbook of Turbomachinery, Second Edition PDFDocument67 pagesHandbook of Turbomachinery, Second Edition PDFitaryNo ratings yet
- MET401 - Theory of MachineDocument161 pagesMET401 - Theory of MachinexilarowNo ratings yet
- Kinematics of MechanismsDocument82 pagesKinematics of MechanismsDharmesh PatelNo ratings yet
- Functionand ScriptsDocument2 pagesFunctionand ScriptsJonathan TerrónNo ratings yet
- Struct ArraysDocument2 pagesStruct ArraysJonathan TerrónNo ratings yet
- Logical IndexingDocument2 pagesLogical IndexingJonathan TerrónNo ratings yet
- Function HandlesDocument2 pagesFunction HandlesJonathan TerrónNo ratings yet
- Lec01 Matan PDFDocument79 pagesLec01 Matan PDFJonathan TerrónNo ratings yet
- Condicionales en R PDFDocument28 pagesCondicionales en R PDFAlin Eduardo Gabino GarciaNo ratings yet
- Motores A PasosDocument97 pagesMotores A PasosJonathan TerrónNo ratings yet
- C Digo-programa-DerechaSimpleDocument2 pagesC Digo-programa-DerechaSimpleitalo brasil vasquez leonNo ratings yet
- Lec01 Matan PDFDocument79 pagesLec01 Matan PDFJonathan TerrónNo ratings yet
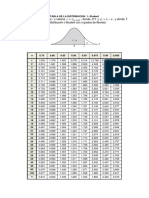
- Tabla T StudentDocument1 pageTabla T StudentJonathan TerrónNo ratings yet
- 05 AmazonDocument21 pages05 AmazonJonathan TerrónNo ratings yet
- 02 Class SignalsDocument23 pages02 Class SignalsJonathan TerrónNo ratings yet
- 03 Class SystemsDocument21 pages03 Class SystemsJonathan TerrónNo ratings yet
- Hydraulic Fan Speed - Test and AdjustDocument12 pagesHydraulic Fan Speed - Test and Adjustsyed ahmedNo ratings yet
- Toshiba: ® A20SeriesDocument12 pagesToshiba: ® A20SeriesYangNo ratings yet
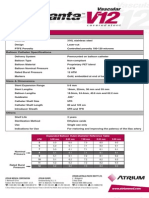
- Advanta V12 Data SheetDocument2 pagesAdvanta V12 Data SheetJuliana MiyagiNo ratings yet
- Cambridge IGCSE Paper 2Document4 pagesCambridge IGCSE Paper 2irajooo epik zizterNo ratings yet
- Sustainable Events Guide May 30 2012 FINAL PDFDocument118 pagesSustainable Events Guide May 30 2012 FINAL PDFInter 4DMNo ratings yet
- Lesson 1 Chapter 9 ErosiondepositionDocument1 pageLesson 1 Chapter 9 Erosiondepositionapi-249320969No ratings yet
- Lesson Plan in Science 9: I. ObjectivesDocument8 pagesLesson Plan in Science 9: I. ObjectivesmarichuNo ratings yet
- Schneider Pressure Switch XMLDocument2 pagesSchneider Pressure Switch XMLhaoNo ratings yet
- HCPL 316J 000eDocument34 pagesHCPL 316J 000eElyes MbarekNo ratings yet
- Cobalamin in Companion AnimalsDocument8 pagesCobalamin in Companion AnimalsFlávia UchôaNo ratings yet
- Tugas 2-TRK Lanjut Kelompok 3 Andre-Arief-IstiaDocument18 pagesTugas 2-TRK Lanjut Kelompok 3 Andre-Arief-IstiaAndre Fahriz Perdana HarahapNo ratings yet
- Nasopharyngeal Angiofibroma - PPTX Essam SrourDocument10 pagesNasopharyngeal Angiofibroma - PPTX Essam SrourSimina ÎntunericNo ratings yet
- Material Specification - 077154C-000-JSS-1700-009 - DDocument13 pagesMaterial Specification - 077154C-000-JSS-1700-009 - DStructures ProductionNo ratings yet
- Managing Diabetic Foot Ulcers ReadingDocument21 pagesManaging Diabetic Foot Ulcers Readinghimanshugupta811997No ratings yet
- Table Equivalent Schedule 40 Steel PipeDocument1 pageTable Equivalent Schedule 40 Steel PipeorisNo ratings yet
- 3rd Quarter Exam (Statistics)Document4 pages3rd Quarter Exam (Statistics)JERALD MONJUANNo ratings yet
- DR PDFDocument252 pagesDR PDFa_ouchar0% (1)
- Electrowetting - Wikipedia, The Free EncyclopediaDocument5 pagesElectrowetting - Wikipedia, The Free EncyclopediaDwane AlmeidaNo ratings yet
- Stepan Formulation 926Document2 pagesStepan Formulation 926Moaz SiddigNo ratings yet
- DISPOSABLE GLOVES CATALOG 2023npDocument4 pagesDISPOSABLE GLOVES CATALOG 2023npTeodylee CruzNo ratings yet
- FYP ProposalDocument11 pagesFYP ProposalArslan SamNo ratings yet
- Digging Deeper: Can Hot Air Provide Sustainable Source of Electricity?Document2 pagesDigging Deeper: Can Hot Air Provide Sustainable Source of Electricity?Рустам ХаджаевNo ratings yet
- PEH Q3 Long QuizDocument1 pagePEH Q3 Long QuizBenedict LumagueNo ratings yet
- Worksheet Series 5: Answer Any 3 Questions From 1 To 6. (2 Score Each)Document6 pagesWorksheet Series 5: Answer Any 3 Questions From 1 To 6. (2 Score Each)AswithNo ratings yet
- Lecture 12Document8 pagesLecture 12Mechanical ZombieNo ratings yet
- Sika - Bitumen: Bitumen Emulsion Waterproof & Protective CoatingDocument3 pagesSika - Bitumen: Bitumen Emulsion Waterproof & Protective Coatingdinu69inNo ratings yet