You might also like
- Ericsson ENM OSS AmdocsDocument28 pagesEricsson ENM OSS AmdocsBaudelaire CREPPY100% (2)
- Ericsson ENM OSS AmdocsDocument28 pagesEricsson ENM OSS AmdocsBaudelaire CREPPYNo ratings yet
- Ericsson ENM OSS AmdocsDocument28 pagesEricsson ENM OSS AmdocsHafssa AIT AMAR100% (1)
- STROBE Checklist BMJ-Open CombinedDocument3 pagesSTROBE Checklist BMJ-Open CombinedFery MardiNo ratings yet
- Ecos RTOSDocument36 pagesEcos RTOSjvl2014100% (1)
- EECS-343 Lecture 02 - Processes and System Calls PDFDocument30 pagesEECS-343 Lecture 02 - Processes and System Calls PDFabhinaygNo ratings yet
- Interprocess Communication and SynchronizationDocument30 pagesInterprocess Communication and Synchronizationansep12No ratings yet
- ACA Mod2Document45 pagesACA Mod2avi003No ratings yet
- LINUX Device Drivers: ParthaDocument20 pagesLINUX Device Drivers: ParthasubramanyamNo ratings yet
- Enmossv1 PDFDocument28 pagesEnmossv1 PDFreskyani emelda pasolangNo ratings yet
- Ch-4 - Threads and ConcurencyDocument35 pagesCh-4 - Threads and ConcurencysankarkvdcNo ratings yet
- Verilog Session: General Introduction To Verilog HDL: EE282 Spring Quarter, 2001-2002Document11 pagesVerilog Session: General Introduction To Verilog HDL: EE282 Spring Quarter, 2001-2002anum11No ratings yet
- Advanced CDocument117 pagesAdvanced Capi-3776776100% (1)
- Good Slides To Understand System CallDocument25 pagesGood Slides To Understand System CallMaheshNo ratings yet
- OS Unit - IIDocument74 pagesOS Unit - IIDee ShanNo ratings yet
- Advanced C: - Sushma - UkilDocument117 pagesAdvanced C: - Sushma - UkilRamachandram JangiliNo ratings yet
- May 2007 IT1353Document18 pagesMay 2007 IT1353cornerssarahNo ratings yet
- Lecture 25-27Document64 pagesLecture 25-27Kripansh mehraNo ratings yet
- 03 AVR ProgrammingDocument38 pages03 AVR ProgrammingPriscillaNo ratings yet
- Advanced C: - UdayDocument117 pagesAdvanced C: - UdayRaghavendra Rajendra Basvan100% (1)
- C NPv1Document209 pagesC NPv1nguyenquangdien1990No ratings yet
- Character Device DriverDocument42 pagesCharacter Device DriverNaga ManjunathNo ratings yet
- Development of Epics Enabled Alarm Anninciation SystemDocument2 pagesDevelopment of Epics Enabled Alarm Anninciation SystemPartha NandyNo ratings yet
- Lec2 Lec3 Cpuvirt FullDocument67 pagesLec2 Lec3 Cpuvirt FullamulyaNo ratings yet
- Advanced Synchronization: - Bloom Paper (Online) - Chapter 6 From Silberschatz - Slides Have Many Illustrative ExamplesDocument61 pagesAdvanced Synchronization: - Bloom Paper (Online) - Chapter 6 From Silberschatz - Slides Have Many Illustrative ExampleslinuxraajaNo ratings yet
- eCOS Operating SystemDocument22 pageseCOS Operating SystemSuganya Selvaraj0% (1)
- Programs, Processors and Threads: Chapter 2 of Robbins BookDocument21 pagesPrograms, Processors and Threads: Chapter 2 of Robbins BookelemaniaqNo ratings yet
- Macos Kernel in SecurityDocument33 pagesMacos Kernel in SecurityVijayaLakshmiNo ratings yet
- Dynamic Kernel Patching: How You Could Add Your Own System-Calls To Linux Without Editing and Recompiling The KernelDocument30 pagesDynamic Kernel Patching: How You Could Add Your Own System-Calls To Linux Without Editing and Recompiling The KernelVishal MishraNo ratings yet
- Avr CoreDocument145 pagesAvr CoreStephanie FloresNo ratings yet
- VX WorksDocument42 pagesVX Worksrakeshkalathil100% (1)
- Lecture 7a PicoBlazeIntroDocument31 pagesLecture 7a PicoBlazeIntroryujindanceNo ratings yet
- Reg2Reg SynthesisDocument24 pagesReg2Reg Synthesisgowtham krishnaNo ratings yet
- HITB-v1.0 - Lab: ARM Assembly ShellcodeDocument66 pagesHITB-v1.0 - Lab: ARM Assembly ShellcodeAlbert LuzxNo ratings yet
- DVCon Europe 2015 TA1 8 PresentationDocument16 pagesDVCon Europe 2015 TA1 8 PresentationJon DCNo ratings yet
- Topic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Document94 pagesTopic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Aya AmirNo ratings yet
- Unit-V: Shell ProgrammingDocument24 pagesUnit-V: Shell ProgrammingSiva KumarNo ratings yet
- Recon2016 Breaking BandDocument55 pagesRecon2016 Breaking BandJuanNo ratings yet
- Mcgarr Summit Hackfest 2023 Deck FinalDocument35 pagesMcgarr Summit Hackfest 2023 Deck FinalLlure GarciaNo ratings yet
- 3 Embedded Systems - Raj KamalDocument37 pages3 Embedded Systems - Raj KamalAshokkumar ManickamNo ratings yet
- System VerilogDocument44 pagesSystem VerilogSonu AgarwalNo ratings yet
- Very Large Scale Instruction WordDocument22 pagesVery Large Scale Instruction Wordrboy1993No ratings yet
- Verilog AMS TutorialDocument29 pagesVerilog AMS TutorialSiva KrishnaNo ratings yet
- Module 3 CoaDocument17 pagesModule 3 CoaGourab DashNo ratings yet
- Lisa18 Slides MastersDocument127 pagesLisa18 Slides Mastersadrien.blanchetNo ratings yet
- Performance of Systemverilog CodingDocument8 pagesPerformance of Systemverilog CodingmaxNo ratings yet
- Developing An OEM Adaptation LayerDocument49 pagesDeveloping An OEM Adaptation LayerGet YourBookNo ratings yet
- Advanced C: - "°º - Calypso - º°"Document117 pagesAdvanced C: - "°º - Calypso - º°"Pradeep TiwariNo ratings yet
- Unit 2Document23 pagesUnit 2PRADEEP KOPPARTHINo ratings yet
- Cortex Mo Technical OverviewDocument116 pagesCortex Mo Technical OverviewkavyaNo ratings yet
- Multi-Core Ecu Designing Using Autosar by Deependra MagardeDocument50 pagesMulti-Core Ecu Designing Using Autosar by Deependra MagardeDeependra MagardeNo ratings yet
- Aca NotesDocument23 pagesAca NotesSriram JanakiramanNo ratings yet
- Advanced Computer Architecture Prof Thriveni T KDocument59 pagesAdvanced Computer Architecture Prof Thriveni T KPalaganiRamakrishnaNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Tank Monitoring SystemsDocument69 pagesTank Monitoring SystemsarunmethaNo ratings yet
- Unit-Iv: Real Time Operating SystemDocument55 pagesUnit-Iv: Real Time Operating SystemarunmethaNo ratings yet
- Multitasking Design and Implementation Issues in Embedded SystemsDocument22 pagesMultitasking Design and Implementation Issues in Embedded SystemsarunmethaNo ratings yet
- Embedded Software Primer - Ch6Document26 pagesEmbedded Software Primer - Ch6arunmethaNo ratings yet
- Embedded System On Safety Critical For Nuclear Power Plant: Sabarisan.V, Prabhu.R, Krishnaprasad.VDocument8 pagesEmbedded System On Safety Critical For Nuclear Power Plant: Sabarisan.V, Prabhu.R, Krishnaprasad.VarunmethaNo ratings yet
- Journal of Magnetism and Magnetic Materials: Research ArticlesDocument7 pagesJournal of Magnetism and Magnetic Materials: Research ArticlesarunmethaNo ratings yet
- 10 1039@C8CS00928G PDFDocument39 pages10 1039@C8CS00928G PDFarunmethaNo ratings yet
- Top 50 Baby Names of 2011 by Meaning: Contributed by Michelle MaffeiDocument2 pagesTop 50 Baby Names of 2011 by Meaning: Contributed by Michelle MaffeiarunmethaNo ratings yet
- Focus Reviews: Silica-Coated Metal NanoparticlesDocument10 pagesFocus Reviews: Silica-Coated Metal NanoparticlesarunmethaNo ratings yet
- Capability, Governance and Nanotechnology Developments: A Focus On IndiaDocument4 pagesCapability, Governance and Nanotechnology Developments: A Focus On IndiaarunmethaNo ratings yet
- Challenges and Prospects of Nanopillar-Based Solar Cells: 1) Device StructuresDocument15 pagesChallenges and Prospects of Nanopillar-Based Solar Cells: 1) Device StructuresarunmethaNo ratings yet
- WHMCS Provisioning Module DocsDocument20 pagesWHMCS Provisioning Module DocsEli ANo ratings yet
- Multistage and Combining NetworksDocument16 pagesMultistage and Combining NetworksNausheen SaharNo ratings yet
- Gartner - Integration Magic QuadrantDocument23 pagesGartner - Integration Magic QuadrantPatrick AdamsNo ratings yet
- MIT401 With AnswersDocument14 pagesMIT401 With AnswersAmit ParabNo ratings yet
- 1-5-6-API Limits - Microsoft DocsDocument5 pages1-5-6-API Limits - Microsoft DocsAntonio Bornia LabradorNo ratings yet
- ACP Question BankDocument5 pagesACP Question BanksunithaNo ratings yet
- Operations Research Principles and Practice - Rgakzur PDFDocument2 pagesOperations Research Principles and Practice - Rgakzur PDFAdarsh VijayanNo ratings yet
- PHP Multiple Choice Questions and Answers: Ans: D and eDocument11 pagesPHP Multiple Choice Questions and Answers: Ans: D and eKannan SNo ratings yet
- 1 MergedDocument25 pages1 MergedvidhyaitNo ratings yet
- Rent A Car DBS - Semstral WorkDocument5 pagesRent A Car DBS - Semstral WorkCristian CartofeanuNo ratings yet
- For Microsoft: Lexis Office Tip Sheet-Check Cite FormatDocument2 pagesFor Microsoft: Lexis Office Tip Sheet-Check Cite FormatMehboob UsmanNo ratings yet
- Data Privacy ActDocument10 pagesData Privacy ActMica ValenzuelaNo ratings yet
- 64 Bit Parallel Prefix Adder PDFDocument4 pages64 Bit Parallel Prefix Adder PDFNaveen GowdruNo ratings yet
- HRMS BrochureDocument4 pagesHRMS Brochureapi-3801793No ratings yet
- Reading The BMP180Document9 pagesReading The BMP180poletoNo ratings yet
- SEEM3470 Tuto 02Document3 pagesSEEM3470 Tuto 02salimNo ratings yet
- Navtor Guideline To New Iho and Iec Ecdis StandardsDocument2 pagesNavtor Guideline To New Iho and Iec Ecdis StandardsardinNo ratings yet
- Survey Mobile V2.3.0 Release Notes (En)Document6 pagesSurvey Mobile V2.3.0 Release Notes (En)Milan PopovićNo ratings yet
- TOC Chapter-1Document21 pagesTOC Chapter-1SAI KUSHAL24No ratings yet
- TBarCode 8.0 Product OverviewDocument13 pagesTBarCode 8.0 Product OverviewCoirini S.A.No ratings yet
- EBS On ExadataDocument55 pagesEBS On ExadataMurali PalepuNo ratings yet
- Python ProgrammingDocument27 pagesPython ProgrammingRaskitNo ratings yet
- Silabus SAP Dasar Sistem Dan Kendali Cerdas v2Document2 pagesSilabus SAP Dasar Sistem Dan Kendali Cerdas v2Rahmat MuttaqinNo ratings yet
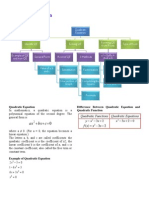
- Quadratic Equation: Ax BXCDocument9 pagesQuadratic Equation: Ax BXCMalaysiaBoleh98% (56)
- My Experiments: Opencl Gpu Matrix Multiplication ProgramDocument19 pagesMy Experiments: Opencl Gpu Matrix Multiplication Programsurajkr23No ratings yet
- PCD 2 MarksDocument23 pagesPCD 2 MarksVignesh VickyNo ratings yet
- IntroCS Part 1Document11 pagesIntroCS Part 1Alfred FredNo ratings yet
- OOP Using C++ Lab Manual 2014Document10 pagesOOP Using C++ Lab Manual 2014anjaneyNo ratings yet
- Veeam Backup & Replication For Vmware: Evaluator'S GuideDocument128 pagesVeeam Backup & Replication For Vmware: Evaluator'S Guidesimoo2010No ratings yet