You might also like
- Mezcla de GasesDocument13 pagesMezcla de GasesSilvestre DivNo ratings yet
- El UniversoDocument7 pagesEl UniversoSilvestre DivNo ratings yet
- Estructura de Codigo de EticaDocument3 pagesEstructura de Codigo de EticaSilvestre DivNo ratings yet
- Carga Electrica y Ley de CoulombDocument10 pagesCarga Electrica y Ley de CoulombSilvestre DivNo ratings yet
- Codigos de Etica ProfesionalesDocument17 pagesCodigos de Etica ProfesionalesSilvestre DivNo ratings yet
- Practica de Laboratorio 4Document6 pagesPractica de Laboratorio 4Anderson CastellanosNo ratings yet
- Calculo IIIDocument6 pagesCalculo IIIJuan Pablo LlanoNo ratings yet
- Intercambiador de Calor Doble TuboDocument33 pagesIntercambiador de Calor Doble TuboARMANDO RAFAEL MEZA MARTINEZNo ratings yet
- Reflexión Total InternaDocument2 pagesReflexión Total InternaEndymion ChoiseulNo ratings yet
- Reporte 3 Ondas ElectromagneticasDocument5 pagesReporte 3 Ondas Electromagneticascarlos solisNo ratings yet
- Trabajo Grupal Fisica 3Document11 pagesTrabajo Grupal Fisica 3RAFAEL TABOADANo ratings yet
- El Universo Que ConocemosDocument3 pagesEl Universo Que ConocemosFranroucis FernandezNo ratings yet
- 1 SIEMENS MOTORES TRIFASICOS PDF - Danny Joel C S - Academia PDFDocument26 pages1 SIEMENS MOTORES TRIFASICOS PDF - Danny Joel C S - Academia PDFjoseonofre26No ratings yet
- Subestaciones ElectricasDocument4 pagesSubestaciones ElectricasCharleeNo ratings yet
- Vivir - Inspirado, Akiva TatzDocument96 pagesVivir - Inspirado, Akiva TatzKabbalah Toys100% (7)
- Proyecto de Pistas y Veredas-DesbloqueadoDocument8 pagesProyecto de Pistas y Veredas-DesbloqueadonelsonNo ratings yet
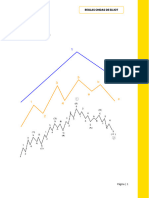
- Reglas Ondas de ElliotDocument15 pagesReglas Ondas de ElliotSamuel SorianoNo ratings yet
- Informe de Termodinamica Avazne CompresoresDocument10 pagesInforme de Termodinamica Avazne Compresoresj.m.vilchesruz02No ratings yet
- TP de Geotecnia Cejas-Greco-AlzamoraDocument13 pagesTP de Geotecnia Cejas-Greco-AlzamoraMaximiliano CejasNo ratings yet
- Reologia Aplicada A Procesos de Fundición y Propiedades Del Metal LíquidoDocument9 pagesReologia Aplicada A Procesos de Fundición y Propiedades Del Metal LíquidoIsmael Saidi Naranjo100% (1)
- Informe Motor DCDocument28 pagesInforme Motor DCDanny RiveraNo ratings yet
- Phased Array UT 3D RuizDocument97 pagesPhased Array UT 3D RuizAndres PedrazaNo ratings yet
- 02.1-Acciones Sísmicas en Edif Acero (GVC)Document27 pages02.1-Acciones Sísmicas en Edif Acero (GVC)JASAMICUNo ratings yet
- Máquinas Simples: FísicaDocument11 pagesMáquinas Simples: Física507profesorNo ratings yet
- Integral EsferaDocument3 pagesIntegral EsferaLuisfel GualcoNo ratings yet
- Solución de IntegralesDocument8 pagesSolución de IntegralesOmar RojasNo ratings yet
- Preinforme CampoDocument7 pagesPreinforme CampoMichelle Miranda GonzálezNo ratings yet
- Caja CerradaDocument15 pagesCaja Cerradasantiago maldonadoNo ratings yet
- Movimiento OscilatorioDocument11 pagesMovimiento OscilatorioJuan Pablo GonzalesNo ratings yet
- DisolusionesDocument3 pagesDisolusionesdavid100% (1)
- Planificacion 2do Lapso 5to Año LiceoDocument5 pagesPlanificacion 2do Lapso 5to Año LiceoCarlos Emigdio LozadaNo ratings yet
- Preguntas Cuestionario ElectricidadDocument4 pagesPreguntas Cuestionario Electricidadmarcelacorrea86% (57)
- Propiedades ColigativasDocument17 pagesPropiedades ColigativasKaren Lizzeth Ortega ZamarripaNo ratings yet
- Ecuaciones Del Movimiento Circular UniformeDocument21 pagesEcuaciones Del Movimiento Circular UniformeAlexsacerdoteNo ratings yet
- Introducción de La FísicaDocument8 pagesIntroducción de La FísicacarlosNo ratings yet