You might also like
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)
- 02 12 HLG AirfoilDocument7 pages02 12 HLG Airfoillojzemulec5966No ratings yet
- Aerodynamic Optimization of WingsDocument21 pagesAerodynamic Optimization of WingsMarcos SoarNo ratings yet
- Aerodynamcis Final Design Report Chapter Draft 1 Team 2Document18 pagesAerodynamcis Final Design Report Chapter Draft 1 Team 2ramez01No ratings yet
- GVSPDocument5 pagesGVSPГригорий ОмельченкоNo ratings yet
- Easa (Jaa) Atpl10Document25 pagesEasa (Jaa) Atpl10jcruzcanonNo ratings yet
- Aircraft 2600 WordsDocument24 pagesAircraft 2600 WordsMashal KhanNo ratings yet
- Aerodynamic 20 Dynamic 20 and 20 Conceptual 20 Design 20 of 20 ADocument24 pagesAerodynamic 20 Dynamic 20 and 20 Conceptual 20 Design 20 of 20 AAnandhu AJNo ratings yet
- B 24 Manual Part 7Document36 pagesB 24 Manual Part 7Carlos Daniel Tantacalle BonifacioNo ratings yet
- Aircraft CG EnvelopesDocument40 pagesAircraft CG EnvelopesDiêgo Monteiro0% (1)
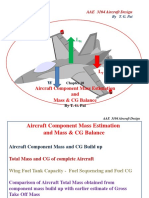
- AAE 3104 CH 10 Aircraft Component Mass Estimation and Mass & CG BalanceDocument44 pagesAAE 3104 CH 10 Aircraft Component Mass Estimation and Mass & CG BalanceDpt HtegnNo ratings yet
- AIRDESIGNDocument4 pagesAIRDESIGNAeriel AldanaNo ratings yet
- 3228 ColourDocument7 pages3228 ColourBhargava MechNo ratings yet
- L3 Applications Group Exercise Group 4Document3 pagesL3 Applications Group Exercise Group 4api-308221295No ratings yet
- WL APAfinalDocument11 pagesWL APAfinalGabriel Rodrigues FelixNo ratings yet
- AeroplaneDocument12 pagesAeroplaneNishant DeyNo ratings yet
- Drag Reduction Through Higher Wing Loading (Kohlman D.L. 1975)Document13 pagesDrag Reduction Through Higher Wing Loading (Kohlman D.L. 1975)Demyan DemyanskyNo ratings yet
- Extended Abstract 83675Document10 pagesExtended Abstract 83675Hoàng ThiếtNo ratings yet
- EngneDocument16 pagesEngnePravin MNo ratings yet
- Ewade2007 ScholzDocument68 pagesEwade2007 ScholzShiva UNo ratings yet
- Hypersonic Glide Vehicle Design ConsderationsDocument35 pagesHypersonic Glide Vehicle Design ConsderationsIan M Mair100% (1)
- Winglets Design IIDocument12 pagesWinglets Design IIGabriel Rodrigues Felix100% (1)
- Components Weight EstimatingDocument19 pagesComponents Weight Estimatingmurad_ashourNo ratings yet
- Homebuilt Aircraft Drag ReductionDocument15 pagesHomebuilt Aircraft Drag ReductionYvess100% (2)
- Components Weight EstimatingDocument19 pagesComponents Weight Estimatingmurad_ashourNo ratings yet
- The Design of Winglets For Low-Speed AircraftDocument18 pagesThe Design of Winglets For Low-Speed Aircraftbarat3786100% (1)
- The Aircraft Engineer June 19, 1931Document7 pagesThe Aircraft Engineer June 19, 1931Mark Evan SalutinNo ratings yet
- Center of GravityDocument21 pagesCenter of GravityRegan FelixNo ratings yet
- AEE462 - Project - Part 1 - Spring 2022Document4 pagesAEE462 - Project - Part 1 - Spring 2022öznur uluNo ratings yet
- Cross-Checks On Design of Tail Surfaces - 2 Topics: Airplane Design (Aerodynamic) Prof. E.G. Tulapurkara Chapter-9Document7 pagesCross-Checks On Design of Tail Surfaces - 2 Topics: Airplane Design (Aerodynamic) Prof. E.G. Tulapurkara Chapter-9Kunhu MonuNo ratings yet
- Design and Development of Delta Wing With Loitering CapabilityDocument27 pagesDesign and Development of Delta Wing With Loitering Capabilitysunshimmer6No ratings yet
- Vertigo V-5: The Hovering AircraftDocument22 pagesVertigo V-5: The Hovering AircraftaadhithyarajasekaranNo ratings yet
- Tip Extensions, Winglets, and C-Wings: Conceptual Design and OptimizationDocument33 pagesTip Extensions, Winglets, and C-Wings: Conceptual Design and Optimizationfelo82No ratings yet
- Experimental Investigation of Trailing-Edge Devices at Transonic SpeedsDocument11 pagesExperimental Investigation of Trailing-Edge Devices at Transonic Speedsiman jabbarNo ratings yet
- CAPTER 5 Raymer - Aircraft DesignDocument11 pagesCAPTER 5 Raymer - Aircraft DesignWilliam Riukstein (LATAM)No ratings yet
- AE364 Midterm 1 Review ProbDocument9 pagesAE364 Midterm 1 Review ProbMauricio ArizpeNo ratings yet
- V-N DiagramDocument13 pagesV-N DiagramAvinash Singh100% (5)
- Design of 300 Ton Payload Cargo AircraftDocument54 pagesDesign of 300 Ton Payload Cargo AircraftSêlvâkûmâr JayabalaNo ratings yet
- Aircraft Performance, Stability and Control With Experiments in Flight QuestionsDocument7 pagesAircraft Performance, Stability and Control With Experiments in Flight QuestionsMohammed SufiyanNo ratings yet
- Aircrafts Truc T 4Document27 pagesAircrafts Truc T 4Meenakshi NathanNo ratings yet
- Weight & Balance UnjDocument61 pagesWeight & Balance UnjRoni Al Habsy100% (1)
- MA 3703 AY 14 S1 Quiz 1 SolutionDocument5 pagesMA 3703 AY 14 S1 Quiz 1 SolutionFeeling_so_flyNo ratings yet
- Aircraft Design in A Nutshell PDFDocument25 pagesAircraft Design in A Nutshell PDFYvessNo ratings yet
- Tail Design and SizingDocument7 pagesTail Design and SizingNikhil SethiNo ratings yet
- RYAN DOMANDE New (61 PG)Document61 pagesRYAN DOMANDE New (61 PG)Filippo CiaravoloNo ratings yet
- Light Plane Weight and BalanceDocument2 pagesLight Plane Weight and BalancejoereisNo ratings yet
- Lab Report MayankDocument16 pagesLab Report MayankMayank AgrawalNo ratings yet
- Config Aero Aero DesignDocument21 pagesConfig Aero Aero DesignEGE ÖZTİNNo ratings yet
- ) We Ob-: MARCH 18, 1920Document1 page) We Ob-: MARCH 18, 1920Mark Evan SalutinNo ratings yet
- AERO 3002 RT-12 Journal ArticleDocument3 pagesAERO 3002 RT-12 Journal ArticlejonthemesNo ratings yet
- Tail Design and SizingDocument6 pagesTail Design and SizingVignesh SelvarajNo ratings yet
- A350 Case StudyDocument32 pagesA350 Case StudyTeddy AndriantsihoaranaNo ratings yet
- Aero1400 Assignment2 2019Document14 pagesAero1400 Assignment2 2019Aasim Mallick0% (1)
- Orig Mech Report Tail SizingDocument18 pagesOrig Mech Report Tail SizingAlg PRasadNo ratings yet
- Feynman Physics Lectures V1Document14 pagesFeynman Physics Lectures V1Abhiyan PaudelNo ratings yet
- A Study On Conceptual Structural Design of Fuselage For A Small Scale Wig Vehicle Using Composite MaterialsDocument8 pagesA Study On Conceptual Structural Design of Fuselage For A Small Scale Wig Vehicle Using Composite Materialskats2404No ratings yet
- How To Make A RC PlaneDocument4 pagesHow To Make A RC PlaneKunal GargNo ratings yet
- FFQP Turn PerformanceDocument4 pagesFFQP Turn PerformancesancakemreNo ratings yet
- FLIGHTMECHANICSDocument48 pagesFLIGHTMECHANICSvenkatakrishnan srinivasanNo ratings yet
- AEC-00B-PPL-S1-STUD4-Aerodynamics (Part 1)Document4 pagesAEC-00B-PPL-S1-STUD4-Aerodynamics (Part 1)laurent100% (1)
- Zenith Ch650Document31 pagesZenith Ch650Aravinthan VarunNo ratings yet
- KT 73 TransponderDocument4 pagesKT 73 TransponderRicardo zafraNo ratings yet
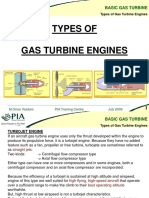
- Gas Turbine Engine TypesDocument16 pagesGas Turbine Engine TypesInterogator5No ratings yet
- UAS Engines: Reference SectionDocument3 pagesUAS Engines: Reference SectionMorgen GumpNo ratings yet
- 05 01 00 inDocument24 pages05 01 00 inMarco Antonio PrietoNo ratings yet
- Eggd/Brs Bristol, Uk: .Radar - Minimum.AltitudesDocument19 pagesEggd/Brs Bristol, Uk: .Radar - Minimum.AltitudesTweed3A100% (1)
- Instructor Support A320Document208 pagesInstructor Support A320Nik Martin100% (27)
- B747 400 Boeing: ATA 27, 28, 29, 32, 35, 38 Schematic ManualDocument42 pagesB747 400 Boeing: ATA 27, 28, 29, 32, 35, 38 Schematic Manualazadair100% (1)
- 101-590010-425 Supp PackDocument4 pages101-590010-425 Supp PackElton CacefoNo ratings yet
- A320-GenFam - MasterNotes Iss 2 Rev.1 15 July 2019Document482 pagesA320-GenFam - MasterNotes Iss 2 Rev.1 15 July 2019anil rekhrajNo ratings yet
- Eblg (Liege) R (05feb16) PDFDocument21 pagesEblg (Liege) R (05feb16) PDFnabatmanNo ratings yet
- 09 How To Optimize FMS Predictions PDFDocument62 pages09 How To Optimize FMS Predictions PDFPete Andre100% (1)
- Ata 34 Navigation 3Document147 pagesAta 34 Navigation 3omarmasaquizaNo ratings yet
- Non-Linear Aeroelasticity (2D) - PPT PDFDocument30 pagesNon-Linear Aeroelasticity (2D) - PPT PDFVIGNESHA MASANANNo ratings yet
- A380 Training NotesDocument124 pagesA380 Training Noteswagdi100% (3)
- G550 MTM 76Document27 pagesG550 MTM 76stive100% (1)
- (IAC) Ils V Rwy 35L: RNP 1 or Rnav 1 - Gnss ReqDocument1 page(IAC) Ils V Rwy 35L: RNP 1 or Rnav 1 - Gnss ReqBoalboalboa NemiandosNo ratings yet
- EGFFDocument14 pagesEGFFPéter SzatmáryNo ratings yet
- 476th VFG A-10c Flight Crew Checklist Change 10Document129 pages476th VFG A-10c Flight Crew Checklist Change 10Sérgio SantanaNo ratings yet
- POH P92 Eaglet English ManualDocument65 pagesPOH P92 Eaglet English ManualRudy Ruddon AttomsNo ratings yet
- Piper Seminole PA-44-180 Training GuideDocument17 pagesPiper Seminole PA-44-180 Training GuideRodrigo SoriaNo ratings yet
- Airbus A330-300: Microsoft Flight Simulator XDocument4 pagesAirbus A330-300: Microsoft Flight Simulator XLol & LoNo ratings yet
- Aircraft Wing Rib DesigningDocument97 pagesAircraft Wing Rib DesigningNagaraj Ramachandrappa100% (1)
- FPL Brochure (Version 2)Document2 pagesFPL Brochure (Version 2)epl486No ratings yet
- Restriction of Height, IAL AspectDocument28 pagesRestriction of Height, IAL AspectCoochbehar AaiNo ratings yet
- B737CL HydraulicsDocument14 pagesB737CL HydraulicsMuhammad Kashif100% (1)
- Diamond DA42 Twin Star Aircraft Flight ManualDocument354 pagesDiamond DA42 Twin Star Aircraft Flight ManualLucas Zvolanek100% (1)
- Boeing 737NG Normal Flow ChecklistDocument2 pagesBoeing 737NG Normal Flow ChecklistLynaNo ratings yet
- Errors Arising From Use of Pitot Static TubeDocument13 pagesErrors Arising From Use of Pitot Static TubewergwNo ratings yet