You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Us Re Tech PotentialDocument40 pagesUs Re Tech PotentialRudi DarussalamNo ratings yet
- US CoalDocument1 pageUS CoalRudi DarussalamNo ratings yet
- Short-Term Energy Outlook (STEO) : Forecast HighlightsDocument50 pagesShort-Term Energy Outlook (STEO) : Forecast HighlightsRudi DarussalamNo ratings yet
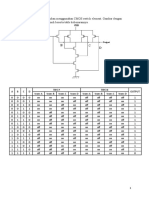
- 1.1 Desain NAND 4 Masukan Menggunakan CMOS Switch Element. Gambar Dengan Rangkaian Transistor Penuh Beserta Table KebenarannyaDocument4 pages1.1 Desain NAND 4 Masukan Menggunakan CMOS Switch Element. Gambar Dengan Rangkaian Transistor Penuh Beserta Table KebenarannyaRudi DarussalamNo ratings yet
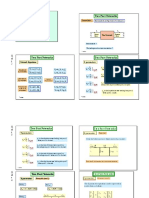
- An Introduction To Two - Port Networks: SL Id e 1Document15 pagesAn Introduction To Two - Port Networks: SL Id e 1Rudi Darussalam100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Introducing JiFi ST Petersburg 2014Document4 pagesIntroducing JiFi ST Petersburg 2014danjohhnNo ratings yet
- Rectilinear Motion and Rotating VesselDocument4 pagesRectilinear Motion and Rotating VesselJack PresadoNo ratings yet
- Formulae and Design Rules To Ec2Document45 pagesFormulae and Design Rules To Ec2moodoo100% (4)
- Terjemahan BukuDocument2 pagesTerjemahan BukuSeprianNo ratings yet
- Commercial Building Structural Design and AnalysisDocument19 pagesCommercial Building Structural Design and AnalysisPatrikNo ratings yet
- Thermal Engineering PDFDocument76 pagesThermal Engineering PDFKartik KuriNo ratings yet
- 0 Physics SyllabusDocument2 pages0 Physics Syllabusiffat fatima patilNo ratings yet
- LaminateDocument154 pagesLaminateAbhishek VaggarNo ratings yet
- Piping Support DesignDocument27 pagesPiping Support DesignOmar TocmoNo ratings yet
- Laws of Motion All DerivationsDocument13 pagesLaws of Motion All DerivationsYashwanthiNo ratings yet
- Francis Bacon, Logic of SensationDocument2 pagesFrancis Bacon, Logic of SensationShrankhla NaryaNo ratings yet
- Bridge Design Report - Docx 150Document17 pagesBridge Design Report - Docx 150nephembaniNo ratings yet
- ChemDocument2 pagesChemBaliuag Guia100% (4)
- Lab 3 - Intro To DynamicDocument36 pagesLab 3 - Intro To DynamicRacheal KirbyNo ratings yet
- Electric Current and Charge RelationshipDocument9 pagesElectric Current and Charge RelationshipLokman HakimNo ratings yet
- Steel Castings Handbook: Supplement 2Document66 pagesSteel Castings Handbook: Supplement 2Harshit AgarwalNo ratings yet
- How To Do Great WorkDocument64 pagesHow To Do Great WorkMohan GuntiNo ratings yet
- CHY382-01 Ester Hydrolysis Lab ReportDocument5 pagesCHY382-01 Ester Hydrolysis Lab ReportJoshua AunNo ratings yet
- The D and F Block Elements PDFDocument8 pagesThe D and F Block Elements PDFTr Mazhar PunjabiNo ratings yet
- GE Gas Turbine IGV AngleDocument10 pagesGE Gas Turbine IGV AngleSamir BenabdallahNo ratings yet
- Topic 1Document17 pagesTopic 1Trịnh Tuấn HiềnNo ratings yet
- Saikat SaraniDocument11 pagesSaikat SaraniPartha GangopadhyayNo ratings yet
- Linear DC Machine PDFDocument21 pagesLinear DC Machine PDFAbdul Aziz0% (1)
- 2130606Document24 pages2130606srinivasan venkatramanNo ratings yet
- Lilin Downhole MotorDocument35 pagesLilin Downhole MotorIAN.SEMUT100% (2)
- Universal cleaner for ultrasonic bathsDocument1 pageUniversal cleaner for ultrasonic bathsJuan ShunaNo ratings yet
- SI Analysis: The Second Generation of Flow Injection TechniquesDocument2 pagesSI Analysis: The Second Generation of Flow Injection TechniquesRu Z KiNo ratings yet
- Analytical PS A01 A10 Solutions 2Document14 pagesAnalytical PS A01 A10 Solutions 2MarieNo ratings yet
- 02 Jaulas de Agujas PDFDocument52 pages02 Jaulas de Agujas PDFRodrigo Schaider Dos SantosNo ratings yet
- Shoot For Your Grade Lab Write UpDocument5 pagesShoot For Your Grade Lab Write Upapi-254812059No ratings yet