You might also like
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesFrom EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesRating: 4.5 out of 5 stars4.5/5 (7)
- Standard Cost EstimateDocument21 pagesStandard Cost EstimateMOORTHYNo ratings yet
- Internal Gear Pump DesignDocument14 pagesInternal Gear Pump Designafriyan.inbox capcxNo ratings yet
- Section 5 - Induction Motor Drive PDFDocument55 pagesSection 5 - Induction Motor Drive PDFlalitbickNo ratings yet
- Cargo ManagementDocument45 pagesCargo ManagementShubham Chaurasia75% (8)
- GROSS Mystery of UFOs A PreludeDocument309 pagesGROSS Mystery of UFOs A PreludeTommaso MonteleoneNo ratings yet
- Recipes From The Perfect Scoop by David LebovitzDocument10 pagesRecipes From The Perfect Scoop by David LebovitzThe Recipe Club100% (7)
- Lecture Notes On Construction Project ManagementDocument7 pagesLecture Notes On Construction Project Managementqwertyui123321No ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- Fighting Techniques of The Early Modern World AD 1500-AD 1763 - Equipment Combat Skills Amp Amp TacticsDocument258 pagesFighting Techniques of The Early Modern World AD 1500-AD 1763 - Equipment Combat Skills Amp Amp Tacticslupoeva100% (3)
- 3200AMMe - Part 4Document207 pages3200AMMe - Part 4Tanja Kesic100% (1)
- Combined Shear and TensionDocument16 pagesCombined Shear and TensionDAN MARK OPONDANo ratings yet
- Induction Motors 2 2020Document15 pagesInduction Motors 2 2020Jonathan ArturoNo ratings yet
- Induction Machine: 1. Slip and Rotor FrequencyDocument8 pagesInduction Machine: 1. Slip and Rotor FrequencyuttamNo ratings yet
- 3ph Induction Mc-Te, MaxDocument6 pages3ph Induction Mc-Te, MaxMd Moinul Alom ShovonNo ratings yet
- 7 - Lecture - Induction MotorsDocument41 pages7 - Lecture - Induction MotorspaurushgodharNo ratings yet
- Lab 5. Audio Amplifier: OutputDocument3 pagesLab 5. Audio Amplifier: Outputkrsk50No ratings yet
- Chapter 9 - InductionDocument11 pagesChapter 9 - InductionLin ChongNo ratings yet
- Engine Design and Operating Parameters: TopicDocument42 pagesEngine Design and Operating Parameters: TopicSyedNo ratings yet
- 9 Torque EquationDocument11 pages9 Torque EquationAbhyagniNo ratings yet
- Elementi Elektronike - FEBRUAR 2017 - REŠENJA: I R R V V IDocument3 pagesElementi Elektronike - FEBRUAR 2017 - REŠENJA: I R R V V IФејсбук КорисникNo ratings yet
- Fluid System 12-Axial Flow Steam and Gas TurbinesDocument33 pagesFluid System 12-Axial Flow Steam and Gas TurbinesAjengAnsyraNo ratings yet
- Adobe Scan 23-Nov-2022Document4 pagesAdobe Scan 23-Nov-2022SunnyNo ratings yet
- ECE325 6-InductionMotors 2Document8 pagesECE325 6-InductionMotors 220071a0297No ratings yet
- High Side Current Sense CircuitDocument6 pagesHigh Side Current Sense Circuitabhay pandeyNo ratings yet
- New Lossy/Loss-Less Synthetic Floating Inductance Configuration Realized With Only Two CfoasDocument7 pagesNew Lossy/Loss-Less Synthetic Floating Inductance Configuration Realized With Only Two CfoaszainabNo ratings yet
- Current Electricity-09-Subjective and Objective SolutionsDocument26 pagesCurrent Electricity-09-Subjective and Objective SolutionsRaju SinghNo ratings yet
- AttachmentDocument29 pagesAttachmentfisahabirhane16No ratings yet
- XR 2207Document24 pagesXR 2207peter3972No ratings yet
- CHAPTER-4 Power Train SystemDocument182 pagesCHAPTER-4 Power Train SystemEssa YimerNo ratings yet
- Engine Design and Operating ParametersDocument59 pagesEngine Design and Operating ParametersAneeq RaheemNo ratings yet
- Effect of Speed On Boundary Friction ForceDocument39 pagesEffect of Speed On Boundary Friction ForceSriniNo ratings yet
- Axial Flow Compressors: An Efficient Way To Ingest Life in Large Amount of Fluids !!!Document30 pagesAxial Flow Compressors: An Efficient Way To Ingest Life in Large Amount of Fluids !!!Keerthi MNo ratings yet
- KKMNDocument5 pagesKKMNKATY LISBETH MOROCHO GUACHONo ratings yet
- Skee 3263 Exercise 3Document5 pagesSkee 3263 Exercise 3sawsheng59No ratings yet
- ECX4230 - Assignment # 3 - 2010 Due Date: See Activity DiaryDocument4 pagesECX4230 - Assignment # 3 - 2010 Due Date: See Activity DiaryDilanNo ratings yet
- LCS Assignment 1Document7 pagesLCS Assignment 1Ahad MunawarNo ratings yet
- Parts ListDocument1 pageParts ListWiwy TransmitNo ratings yet
- Fluid System 12-Axial Flow Steam and Gas TurbinesDocument33 pagesFluid System 12-Axial Flow Steam and Gas Turbinesmuhammad irfan Septian nugrahaNo ratings yet
- Iwomi ElectDocument5 pagesIwomi ElectP1nice48No ratings yet
- Digital To Analog Converters: Andrew Gardner Muhammad Salman David Fernandes Jevawn RobertsDocument35 pagesDigital To Analog Converters: Andrew Gardner Muhammad Salman David Fernandes Jevawn Robertsmohan inumarthiNo ratings yet
- EE 4PM4 Quiz 1 Solutions - 2016-17Document4 pagesEE 4PM4 Quiz 1 Solutions - 2016-17PreethamNo ratings yet
- Chuong 3 - Dieu Khien Toc Do Dong Co KDBDocument55 pagesChuong 3 - Dieu Khien Toc Do Dong Co KDBThiên HảiNo ratings yet
- Effect of Capacitor Injection in The Rotor Winding of An Induction ...Document3 pagesEffect of Capacitor Injection in The Rotor Winding of An Induction ...Eugene AgbachiNo ratings yet
- H2PToday2207 Design Innovatia Part5Document9 pagesH2PToday2207 Design Innovatia Part5juanNo ratings yet
- ECE522 2 GeneratorDocument72 pagesECE522 2 Generatorirtiza.maksudNo ratings yet
- Circuito de Control para Motor DCDocument3 pagesCircuito de Control para Motor DCEdgar AvircataNo ratings yet
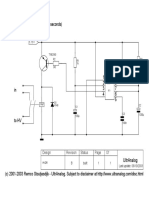
- HV Delay Relay (Approx. 60 Seconds) Ultranalog 2002: Design Status of RevisionDocument1 pageHV Delay Relay (Approx. 60 Seconds) Ultranalog 2002: Design Status of Revisionbht51801201No ratings yet
- Lecture IMDocument49 pagesLecture IMVasanth 1116No ratings yet
- Beee Unit-4 Induction & Synchronous MotorsDocument27 pagesBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriNo ratings yet
- Specially Time Delay RelaysDocument8 pagesSpecially Time Delay RelaysMohammad HosseinNo ratings yet
- Synchronised Ujt Triggering CircuitDocument2 pagesSynchronised Ujt Triggering Circuitsvinod s67% (3)
- Analog Communication Lab ManualDocument59 pagesAnalog Communication Lab Manualsasa_sag100% (2)
- 17S2 EE3010 PPT Lecture9-TransformersDocument21 pages17S2 EE3010 PPT Lecture9-Transformersming yangNo ratings yet
- SP490E / SP491E: Enhanced Full-Duplex RS-485 TransceiversDocument13 pagesSP490E / SP491E: Enhanced Full-Duplex RS-485 TransceiversThomas ThomasNo ratings yet
- 90's FaceDocument6 pages90's FaceDavid BrownNo ratings yet
- Ec-Pdc Lab ManualDocument88 pagesEc-Pdc Lab ManualSanjitha KurugantiNo ratings yet
- BJT CompleteDocument9 pagesBJT CompleteMano EndlaNo ratings yet
- Ifv (T) V Sin (T) A Sin, Derive The Expressions For A andDocument12 pagesIfv (T) V Sin (T) A Sin, Derive The Expressions For A andWESTLY JUCONo ratings yet
- Coupling: Basic Difference BetweenDocument41 pagesCoupling: Basic Difference BetweenKadiyam VijayNo ratings yet
- Maquina Electricas. Sol. Ed5-282-292Document11 pagesMaquina Electricas. Sol. Ed5-282-292Luis BernalNo ratings yet
- Lecture Note - ED - Speed Control of IMDocument5 pagesLecture Note - ED - Speed Control of IMsashaikhNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- XII BPS Officers' Arrear Calculator V1.1Document12 pagesXII BPS Officers' Arrear Calculator V1.1qwertyui123321No ratings yet
- Open Brochure - Aucrtion-Version 3Document34 pagesOpen Brochure - Aucrtion-Version 3qwertyui123321No ratings yet
- Vamp 57 Nrjed114608enDocument16 pagesVamp 57 Nrjed114608enqwertyui123321100% (1)
- Lab ReportsDocument1 pageLab Reportsqwertyui123321No ratings yet
- PhipDocument373 pagesPhipqwertyui123321No ratings yet
- Quest Global Engineering Services Private Limited.: Dear Candidate Congratulations & Welcome Aboard!Document1 pageQuest Global Engineering Services Private Limited.: Dear Candidate Congratulations & Welcome Aboard!qwertyui123321No ratings yet
- IRC3020 UsersGuide UkEN 3Document821 pagesIRC3020 UsersGuide UkEN 3qwertyui123321No ratings yet
- Indian Electricity RULES - Safety RequirementsDocument14 pagesIndian Electricity RULES - Safety Requirementsqwertyui1233210% (1)
- 3-Phase Power Network Analyzer Recorder nd40 1158757-2815139 PDFDocument5 pages3-Phase Power Network Analyzer Recorder nd40 1158757-2815139 PDFqwertyui123321No ratings yet
- PSPCL CircluarDocument2 pagesPSPCL Circluarqwertyui123321No ratings yet
- Hindustan Petroleum Corporation Limited: Important DatesDocument17 pagesHindustan Petroleum Corporation Limited: Important Datesqwertyui123321No ratings yet
- 3001 LSG DLG M3Document1 page3001 LSG DLG M3qwertyui123321No ratings yet
- Punjab NEW GK PDFDocument3 pagesPunjab NEW GK PDFqwertyui123321No ratings yet
- Detection ManualDocument26 pagesDetection Manualqwertyui123321No ratings yet
- Crouse Hinds XPL Led BrochureDocument12 pagesCrouse Hinds XPL Led BrochureBrayan Galaz BelmarNo ratings yet
- GP1 Q1 Week-1Document18 pagesGP1 Q1 Week-1kickyknacksNo ratings yet
- Week 1 - NATURE AND SCOPE OF ETHICSDocument12 pagesWeek 1 - NATURE AND SCOPE OF ETHICSRegielyn CapitaniaNo ratings yet
- Bhil Tribal Mobilisation in AlirajpurDocument14 pagesBhil Tribal Mobilisation in Alirajpurrahul banerjeeNo ratings yet
- Column, Slab, Footing and Wall Footing Foundations: Class A MixingDocument47 pagesColumn, Slab, Footing and Wall Footing Foundations: Class A MixingGioharry Nul PanambulanNo ratings yet
- Middle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryDocument22 pagesMiddle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryMerlinNo ratings yet
- Proefschrift T. Steenstra - tcm24-268767Document181 pagesProefschrift T. Steenstra - tcm24-268767SLAMET PAMBUDINo ratings yet
- Biology Accel Syllabus 2011-2012Document3 pagesBiology Accel Syllabus 2011-2012Mike DeleonNo ratings yet
- Dual Op Amp and Voltage Reference Ap4310/ADocument12 pagesDual Op Amp and Voltage Reference Ap4310/AМихаил ЯненкоNo ratings yet
- Parts Catalogue of Foton: (TC2A504-034K)Document132 pagesParts Catalogue of Foton: (TC2A504-034K)МаксимNo ratings yet
- BC-6000 Installation Guide V7.0 enDocument111 pagesBC-6000 Installation Guide V7.0 enmentule88No ratings yet
- Twilight PrincessDocument49 pagesTwilight PrincessHikari DiegoNo ratings yet
- Cobalamin in Companion AnimalsDocument8 pagesCobalamin in Companion AnimalsFlávia UchôaNo ratings yet
- Amnaya Sutra (English)Document458 pagesAmnaya Sutra (English)Assam Bhakti SagarNo ratings yet
- World's Standard Model G6A!: Low Signal RelayDocument9 pagesWorld's Standard Model G6A!: Low Signal RelayEgiNo ratings yet
- DudjDocument4 pagesDudjsyaiful rinantoNo ratings yet
- 07ercoskun 05 01 PDFDocument23 pages07ercoskun 05 01 PDFjagmadridNo ratings yet
- Why Are Solids Are Floating On My Secondary Clarifier - Biological Waste TreatmDocument6 pagesWhy Are Solids Are Floating On My Secondary Clarifier - Biological Waste TreatmIsaac FernándezNo ratings yet
- Math COT 3Document18 pagesMath COT 3Icy Mae SenadosNo ratings yet
- FemDocument4 pagesFemAditya SharmaNo ratings yet
- Nissan Copper LTDDocument11 pagesNissan Copper LTDankit_shahNo ratings yet
- NF en Iso 5167-6-2019Document22 pagesNF en Iso 5167-6-2019Rem FgtNo ratings yet
- Lesson 1 Chapter 9 ErosiondepositionDocument1 pageLesson 1 Chapter 9 Erosiondepositionapi-249320969No ratings yet