You might also like
- Aula3 LabDocument20 pagesAula3 LabMarcos Antonio SilvaNo ratings yet
- KCP Operation Modes Coordinate SystemsDocument25 pagesKCP Operation Modes Coordinate SystemsNguyễn Duy AnhNo ratings yet
- Indoor Intelligent Mobile Robot Localization Using Fuzzy Compensation and Kalman Filter To Fuse The Data of Gyroscope and MagnetometerDocument12 pagesIndoor Intelligent Mobile Robot Localization Using Fuzzy Compensation and Kalman Filter To Fuse The Data of Gyroscope and MagnetometerWheel ChairNo ratings yet
- Virtual Lab 3 - Direct IO CommunicationDocument6 pagesVirtual Lab 3 - Direct IO CommunicationAhmed HamoudaNo ratings yet
- 181 184 1 PB PDFDocument8 pages181 184 1 PB PDFRoy HidalgoNo ratings yet
- Lab 1 Wall FollowingDocument3 pagesLab 1 Wall FollowingMichel StephanNo ratings yet
- 2013 2014 Report1Document64 pages2013 2014 Report1Christian Gonzalez ArandaNo ratings yet
- PLC Based Pick and Place Robot With 4 DOF: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyDocument5 pagesPLC Based Pick and Place Robot With 4 DOF: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyGS AshishNo ratings yet
- BullseyeDocument4 pagesBullseyeRuben CuevasNo ratings yet
- Choi 2020Document12 pagesChoi 2020Duby CastellanosNo ratings yet
- Comau Pro ToolDocument63 pagesComau Pro ToolmarcioNo ratings yet
- Accelerometer-Based Control of An Industrial Robotic ArmDocument6 pagesAccelerometer-Based Control of An Industrial Robotic ArmsanjusanjanareddyNo ratings yet
- Creating Cycles Production SeproDocument9 pagesCreating Cycles Production SeproPasarica AlexandruNo ratings yet
- Untitled PDFDocument124 pagesUntitled PDFNarra Vivek168No ratings yet
- Autoprobing: FunctionalDocument6 pagesAutoprobing: FunctionalKevIn ChamoRroNo ratings yet
- An Intelligent Line-Following Robot Project For Introductory Robot CoursesDocument7 pagesAn Intelligent Line-Following Robot Project For Introductory Robot CoursesSrikrishna JanaNo ratings yet
- An Intelligent Line-Following Robot Project For Introductory Robot Courses PDFDocument7 pagesAn Intelligent Line-Following Robot Project For Introductory Robot Courses PDFHo Van RoiNo ratings yet
- Logger: ScoutDocument4 pagesLogger: ScoutإسورNo ratings yet
- Robotics Final AssignmentDocument17 pagesRobotics Final AssignmentVazguène AkopianNo ratings yet
- Frobt491 Kuka Gravity PresDocument22 pagesFrobt491 Kuka Gravity PrescelankanNo ratings yet
- IEEE 1999 Conference on Control Applications ProceedingsDocument6 pagesIEEE 1999 Conference on Control Applications ProceedingsShafayat AbrarNo ratings yet
- Prospekt - PAL 3001 - EN - 2020Document2 pagesProspekt - PAL 3001 - EN - 2020Luis RiveraNo ratings yet
- Programmable Linear Position Sensors: Technology and BenefitsDocument6 pagesProgrammable Linear Position Sensors: Technology and BenefitsTravis WoodNo ratings yet
- Gesture Controlled Drone: Ian Walter and Monette KhadrDocument5 pagesGesture Controlled Drone: Ian Walter and Monette KhadrGuruprasad NayakNo ratings yet
- IROS 2012 Particle Filtering for Maize Field Robot NavigationDocument5 pagesIROS 2012 Particle Filtering for Maize Field Robot NavigationjfrasconNo ratings yet
- Cad CamDocument5 pagesCad Camravi vermaNo ratings yet
- OpumeterDocument2 pagesOpumeterAndres Abdi Diaz NavarreteNo ratings yet
- Assignment - 2 CNC Programming: Prof. R.O.VDocument11 pagesAssignment - 2 CNC Programming: Prof. R.O.VAnkit NandwaniNo ratings yet
- RobotDocument5 pagesRobotSonal Mehir RamjununNo ratings yet
- Exp 9Document9 pagesExp 920R211 - D L SHRIVARSHININo ratings yet
- BOGDANLaurean 1Document9 pagesBOGDANLaurean 1Ricardo Villagomez DominguezNo ratings yet
- DSP EA LaboratoryDocument15 pagesDSP EA Laboratorykhan shahrukhNo ratings yet
- 1 IntroductionDocument33 pages1 IntroductionNebojsa NunicNo ratings yet
- A Total Station Is A Modern Surveying Instrument That Integrates An Electronic Theodolite With An Electronic Distance MeterDocument2 pagesA Total Station Is A Modern Surveying Instrument That Integrates An Electronic Theodolite With An Electronic Distance MeterNeilyn BongalanNo ratings yet
- Sensors: Toward Smart Aerospace Structures: Design of A Piezoelectric Sensor and Its Analog Interface For Flaw DetectionDocument19 pagesSensors: Toward Smart Aerospace Structures: Design of A Piezoelectric Sensor and Its Analog Interface For Flaw DetectionValdir JuniorNo ratings yet
- Microcell CalibrationDocument10 pagesMicrocell Calibrationprabhu0487No ratings yet
- GRAW Track Measurement SystemsDocument48 pagesGRAW Track Measurement Systemscheikh ahmedNo ratings yet
- VC Rev215 Manual enDocument560 pagesVC Rev215 Manual engoksel OnverNo ratings yet
- The Design and Implementation of A Vision-Based People Counting System in BusesDocument3 pagesThe Design and Implementation of A Vision-Based People Counting System in Buseschoudharynipun69No ratings yet
- Robotics Lab Session Covers Drive Mechanisms, Payloads, Sensors (MECH 4002YDocument12 pagesRobotics Lab Session Covers Drive Mechanisms, Payloads, Sensors (MECH 4002Ysanjiv0909No ratings yet
- C CC C CC CCC C C C C C C CCCCCCCCCCCCCCCDocument7 pagesC CC C CC CCC C C C C C C CCCCCCCCCCCCCCCShaniba IbrahimNo ratings yet
- Lab 4 Industrial AqilDocument9 pagesLab 4 Industrial Aqilekalrudy20No ratings yet
- Robotino Motion ControlDocument23 pagesRobotino Motion ControlNuno MonteiroNo ratings yet
- 1 DobotDocument4 pages1 Dobotrk krishnaNo ratings yet
- Labs-CIM Lab ManualDocument48 pagesLabs-CIM Lab ManualRicardoVillanuevaCabreraNo ratings yet
- Interactive Scan Plan Poster V2Document1 pageInteractive Scan Plan Poster V2srikanthNo ratings yet
- Real-Time Obstacle Avoidance Using Bubble ReboundDocument6 pagesReal-Time Obstacle Avoidance Using Bubble ReboundStefania MihaiNo ratings yet
- Optocone Wireless CPT (U) Data Transfer Sep 2011Document2 pagesOptocone Wireless CPT (U) Data Transfer Sep 2011garciajaimeandres25No ratings yet
- Teach digital logic circuits via 3D-printed mechanic gatesDocument7 pagesTeach digital logic circuits via 3D-printed mechanic gatesabdul sabourNo ratings yet
- DELMIA Tutorial PDFDocument13 pagesDELMIA Tutorial PDFEduard Lupus LoboNo ratings yet
- Th6D Analogue/Digital Interface: Technical Information - Translation of The OriginalDocument25 pagesTh6D Analogue/Digital Interface: Technical Information - Translation of The OriginalArda YazıcıNo ratings yet
- Towercrane User ManualDocument63 pagesTowercrane User ManualAyads ThalosNo ratings yet
- NavigationDocument17 pagesNavigationQuan NguyenNo ratings yet
- AssignmentqDocument12 pagesAssignmentqDirajen PMNo ratings yet
- Automation and Robotics AssignmentDocument13 pagesAutomation and Robotics AssignmentMoHit LalNo ratings yet
- Department Le TR Cal NG Neering Harbin Institute F Technology Harbin 150001 P.R. China E-Mail Yfeng Op Hit. Du - CNDocument6 pagesDepartment Le TR Cal NG Neering Harbin Institute F Technology Harbin 150001 P.R. China E-Mail Yfeng Op Hit. Du - CNSatrio HaryoNo ratings yet
- PC Based Spectrum Analuzer With MC1496Document7 pagesPC Based Spectrum Analuzer With MC1496SzyNo ratings yet
- Tna300 TX8H EngDocument392 pagesTna300 TX8H EngAndey RibalkoNo ratings yet
- Industrial X-Ray Computed TomographyFrom EverandIndustrial X-Ray Computed TomographySimone CarmignatoNo ratings yet
- A500-B5C PLC For Injection (S - N 1-482 & 1-488) PDFDocument56 pagesA500-B5C PLC For Injection (S - N 1-482 & 1-488) PDFDavid MartinezNo ratings yet
- Electrical Circuit Diagram Doosan Part1Document109 pagesElectrical Circuit Diagram Doosan Part1David MartinezNo ratings yet
- Manual Hardware FanucDocument445 pagesManual Hardware Fanuced_guaitolini2161100% (2)
- Nematron BASIC ManualDocument222 pagesNematron BASIC ManualDavid Martinez100% (1)
- AC Servo ControllerDocument194 pagesAC Servo ControllerSt&fanoNo ratings yet
- 1398 In001 - en PDocument156 pages1398 In001 - en Phet gmbhNo ratings yet
- IQ Series Installation Manual Part2Document77 pagesIQ Series Installation Manual Part2David MartinezNo ratings yet
- A16b 1310 0010 01 Power Unit Fanuc Manual PDFDocument635 pagesA16b 1310 0010 01 Power Unit Fanuc Manual PDFNisar AhmedNo ratings yet
- Troubleshooting Steps WirematicDocument98 pagesTroubleshooting Steps WirematicDavid MartinezNo ratings yet
- Operations Manual Cs3 RegiusDocument254 pagesOperations Manual Cs3 RegiusRoyMezaRivaldoNo ratings yet
- Software Information Electrocraft ManualDocument40 pagesSoftware Information Electrocraft ManualDavid MartinezNo ratings yet
- IndexDocument22 pagesIndexPravesh Kumar ThakurNo ratings yet
- GML Ultra User Manual 1398-5.11 PDFDocument191 pagesGML Ultra User Manual 1398-5.11 PDFDavid MartinezNo ratings yet
- NEC Article 250Document42 pagesNEC Article 250unknown_3100% (1)
- CNC Operation Manual SV20 Swiss Type Automatic LatheDocument487 pagesCNC Operation Manual SV20 Swiss Type Automatic LatheDavid Martinez67% (3)
- Rs232 DocumentationDocument10 pagesRs232 Documentationandan44No ratings yet
- CNC Precision Machine Tools Cincom E332 Operator Manual Type IVDocument564 pagesCNC Precision Machine Tools Cincom E332 Operator Manual Type IVDavid MartinezNo ratings yet
- GML Ultra Getting Started - 1398-5.10Document86 pagesGML Ultra Getting Started - 1398-5.10David MartinezNo ratings yet
- Configuration Dcom Citizen FanucDocument1 pageConfiguration Dcom Citizen FanucDavid MartinezNo ratings yet
- Brief Introduction To Java TechnologyDocument19 pagesBrief Introduction To Java TechnologyDavid MartinezNo ratings yet
- A Designers Guide To Instrumentation Amplifiers 3rd EdDocument130 pagesA Designers Guide To Instrumentation Amplifiers 3rd EdCL ManinhoNo ratings yet
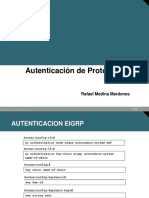
- Autenticación de Protocolos: Rafael Medina MardonesDocument4 pagesAutenticación de Protocolos: Rafael Medina MardonesDavid MartinezNo ratings yet
- Digital Stepper Drive CW250: DescriptionsDocument7 pagesDigital Stepper Drive CW250: DescriptionsDavid MartinezNo ratings yet
- ROUTE Chapter 2 - CCNP ROUTE (Version 6.0)Document8 pagesROUTE Chapter 2 - CCNP ROUTE (Version 6.0)AS2205100% (2)
- UC100 Users GuideDocument12 pagesUC100 Users GuideDavid MartinezNo ratings yet
- Selection PaP1 1Document32 pagesSelection PaP1 1RofochoNo ratings yet
- Cuestinario Final CCNAS 1.1Document29 pagesCuestinario Final CCNAS 1.1José Luis Ramirez AlfordNo ratings yet
- CNC CK7516Document12 pagesCNC CK7516David MartinezNo ratings yet
- Communication Systems An Introduction To Signal and Noise in Electrical CommunicationsDocument853 pagesCommunication Systems An Introduction To Signal and Noise in Electrical Communicationseugenedumon100% (3)
- Turning Away From Philosophy of BeingDocument152 pagesTurning Away From Philosophy of BeingEve AthanasekouNo ratings yet
- ANSI HI 9 6 2 2001 Centrifugal and Vertical Pumps For Allowable Nozzle Loads PDFDocument46 pagesANSI HI 9 6 2 2001 Centrifugal and Vertical Pumps For Allowable Nozzle Loads PDFWalter EsquivelNo ratings yet
- Study On Scattering Characteristics of Chaff For RadarDocument4 pagesStudy On Scattering Characteristics of Chaff For RadarAshwani SinghNo ratings yet
- Civil Engineering Hydraulics ProblemsDocument2 pagesCivil Engineering Hydraulics ProblemsLenielle AmatosaNo ratings yet
- Bel Ray Molylube Ultra Open Gear Lubricant PDS 12june2023 1Document2 pagesBel Ray Molylube Ultra Open Gear Lubricant PDS 12june2023 1xxx yyyNo ratings yet
- What Is Transformer?: Table of ContentDocument9 pagesWhat Is Transformer?: Table of ContentShreedaNo ratings yet
- Matrices Rosniza's Module 4Document14 pagesMatrices Rosniza's Module 4Rosniza Ab GhaniNo ratings yet
- Mechanical Engineering Lab ReportsDocument11 pagesMechanical Engineering Lab ReportsParikshit UjoodhaNo ratings yet
- CSEC Physics P2 2012 JuneDocument14 pagesCSEC Physics P2 2012 JuneBill BobNo ratings yet
- Design of Experiments Cross Flow Heat Exchanger With Nanofluid Medium ReportDocument45 pagesDesign of Experiments Cross Flow Heat Exchanger With Nanofluid Medium ReportPrakash DahalNo ratings yet
- Lecture-1 - Introduction and Course PolicyDocument25 pagesLecture-1 - Introduction and Course PolicySibasish RoutNo ratings yet
- June 2022 Paper 3Document48 pagesJune 2022 Paper 3Charbel El habrNo ratings yet
- Model SK 6150 6155Document14 pagesModel SK 6150 6155Abdalhakeem AlturkyNo ratings yet
- WINSEM2017-18 MEE1003 TH MB203 VL2017185001359 Reference Material I Ideal, Real Gases and Gas Mixtures 6Document20 pagesWINSEM2017-18 MEE1003 TH MB203 VL2017185001359 Reference Material I Ideal, Real Gases and Gas Mixtures 6سيد محمود بن مسرورNo ratings yet
- Forging: Subjects of InterestDocument58 pagesForging: Subjects of InterestAmrat PatelNo ratings yet
- Microscale Flow Pumping Inspired by Rhythmic Tracheal Compressions in InsectsDocument9 pagesMicroscale Flow Pumping Inspired by Rhythmic Tracheal Compressions in InsectsArijeet TripathyNo ratings yet
- PHY4221 (2020) Assignment 2Document2 pagesPHY4221 (2020) Assignment 2MainzaNo ratings yet
- ACP0LED Series: American Compact LED FloodlightDocument4 pagesACP0LED Series: American Compact LED FloodlightWilliam MartinezNo ratings yet
- Trigonometry Formulas SummaryDocument4 pagesTrigonometry Formulas Summarysyahda100% (1)
- Y.H.Kim, Et Al., - Reference Thermal Neutron Field at KRISS For Calibration of Neutron Detectors (2017)Document7 pagesY.H.Kim, Et Al., - Reference Thermal Neutron Field at KRISS For Calibration of Neutron Detectors (2017)최재원No ratings yet
- Chapter 1 - Design of Special BeamsDocument15 pagesChapter 1 - Design of Special BeamsSine EntertaimentNo ratings yet
- 400kV Cable Technical Data SheetDocument23 pages400kV Cable Technical Data SheetantaryamisinghNo ratings yet
- Urtec 2020 2581 MsDocument18 pagesUrtec 2020 2581 MsAlejandro MonroyNo ratings yet
- Manar Steel Waler SystemDocument56 pagesManar Steel Waler Systemtarek.fileNo ratings yet
- Cal1 Midterm 2020-21 S1 QsDocument2 pagesCal1 Midterm 2020-21 S1 QsTrần Xuân QuỳnhNo ratings yet
- Chapter 10 - Curves of Statical Stability (GZ Curves)Document9 pagesChapter 10 - Curves of Statical Stability (GZ Curves)Adrian B.100% (1)
- Chapter 2Document60 pagesChapter 2Fatih İnalNo ratings yet
- Compare marbles' stopping distances and momentumsDocument29 pagesCompare marbles' stopping distances and momentumsMelerose Dela SernaNo ratings yet
- Mmpapmg 88Document32 pagesMmpapmg 88Pier Paolo LilliuNo ratings yet
- Far Field Boundary Conditions For Compressible FlowsDocument18 pagesFar Field Boundary Conditions For Compressible FlowsmicNo ratings yet