You might also like
- Logica Fuzzy PMSDocument12 pagesLogica Fuzzy PMSElliot VanceNo ratings yet
- DoorSystemsMethodology RequirementsSpecification - 28 47Document20 pagesDoorSystemsMethodology RequirementsSpecification - 28 47김동은No ratings yet
- System ModelDocument9 pagesSystem Modelmonika mitraNo ratings yet
- Tugas 2 - Information ManagementDocument5 pagesTugas 2 - Information ManagementRadit and bambangNo ratings yet
- StaticPROJECT 4Document1 pageStaticPROJECT 4susCitiesNo ratings yet
- L7 U4 IEQ 22657Document32 pagesL7 U4 IEQ 22657samirgaurave5No ratings yet
- Life Cycle CostingDocument116 pagesLife Cycle Costingapi-373284867% (3)
- Cost EstimationDocument69 pagesCost EstimationMr. KNo ratings yet
- DataOps vendor landscape capabilitiesDocument1 pageDataOps vendor landscape capabilitiesRezaNo ratings yet
- Observational MethodDocument65 pagesObservational MethodAnonymous qTP5oq7gNo ratings yet
- QC Project - Muh IkhsanDocument21 pagesQC Project - Muh IkhsanikhsanNo ratings yet
- Product Faliure: Prepared byDocument6 pagesProduct Faliure: Prepared byavik0013No ratings yet
- TransformYourHabits EditedDocument60 pagesTransformYourHabits EditedGowtham GanesanNo ratings yet
- Utkarsh Dixit DensoDocument1 pageUtkarsh Dixit DensoUtkarsh DixitNo ratings yet
- System Engineering Bagian PertamaDocument32 pagesSystem Engineering Bagian PertamaUriyanaNo ratings yet
- POM - Week 4 - Forecasting - SlidesDocument11 pagesPOM - Week 4 - Forecasting - SlidesTony StarkNo ratings yet
- TRB ShootprocessDocument10 pagesTRB ShootprocessDian MeNo ratings yet
- MR Aseem MagowDocument13 pagesMR Aseem MagowSanjay KumarNo ratings yet
- Qa-Qc Bppt-ChevronDocument1 pageQa-Qc Bppt-ChevronRuki ArdiyantoNo ratings yet
- Introduction To Screening Tools: Grow & InnovateDocument71 pagesIntroduction To Screening Tools: Grow & InnovateGowtham GanesanNo ratings yet
- Deployment of an uncertainty analysis workflow to support concept selectionDocument17 pagesDeployment of an uncertainty analysis workflow to support concept selectionOscar Javier Vera ZambranoNo ratings yet
- Introduction To Huawei GENEX Nastar RAN WCDMA-20070827Document25 pagesIntroduction To Huawei GENEX Nastar RAN WCDMA-20070827LuisNo ratings yet
- Technical Trouble Handling FinalDocument8 pagesTechnical Trouble Handling FinalRohmanNo ratings yet
- Align competency, assessment and activities for laws of motionDocument21 pagesAlign competency, assessment and activities for laws of motionKianna Marie VitugNo ratings yet
- Nasa FMEA Presentation PDFDocument28 pagesNasa FMEA Presentation PDFgowtham raju buttiNo ratings yet
- Typical Engineering ActivitiesDocument24 pagesTypical Engineering ActivitiesAnonymous LLLK3pq100% (1)
- Philippine Peso Bill Counterfeit Detection Using Digital Image Processing With Segregation SystemDocument27 pagesPhilippine Peso Bill Counterfeit Detection Using Digital Image Processing With Segregation SystemJOHN RYAN GUINANAONo ratings yet
- Langkah-Langkah PdcaDocument49 pagesLangkah-Langkah Pdcarohishatulilmiyah100% (2)
- Piping DesignDocument26 pagesPiping Designadebora100% (2)
- Eia 4Document7 pagesEia 4Nahid H Mazumder L15No ratings yet
- DYPNF Presendation For Biomass PDFDocument33 pagesDYPNF Presendation For Biomass PDFJaeyoung LeeNo ratings yet
- Template Poster Lawa Suzana PunyaDocument1 pageTemplate Poster Lawa Suzana PunyaAmirul AmriNo ratings yet
- QC Systems Ensure Product QualityDocument25 pagesQC Systems Ensure Product QualitysridharanNo ratings yet
- Interaction Design Process'Document1 pageInteraction Design Process'Aebreme Mae ColladoNo ratings yet
- Bonacorsi Consulting Master DMAIC RoadmapDocument7 pagesBonacorsi Consulting Master DMAIC Roadmapaminos85No ratings yet
- Sesha ResumeDocument2 pagesSesha Resumeseshatd1No ratings yet
- Module 49. Risk AssessmentDocument22 pagesModule 49. Risk Assessmenttaghavi1347No ratings yet
- HRRH roles and functions under 40 charsDocument1 pageHRRH roles and functions under 40 charsSarim AliNo ratings yet
- ERP Course: Planning, Design, and Implementation of ERP Readings: Chapter 3 Mary SumnerDocument27 pagesERP Course: Planning, Design, and Implementation of ERP Readings: Chapter 3 Mary SumnerRedouan AFLISSNo ratings yet
- Concept of Quality Circle: Presented By: Mr. Tanuj AgrawalDocument5 pagesConcept of Quality Circle: Presented By: Mr. Tanuj AgrawalTanuj BansalNo ratings yet
- Roux 2012Document9 pagesRoux 2012aminardakaniNo ratings yet
- Chapter 4Document42 pagesChapter 4Temesgen GetaNo ratings yet
- Aerospace Systems Engineering The Fuzzy Front EndDocument78 pagesAerospace Systems Engineering The Fuzzy Front Enderesag3519No ratings yet
- Post Graduate @bjeigx in Machine Learning & Ai: (Program Curriculum)Document5 pagesPost Graduate @bjeigx in Machine Learning & Ai: (Program Curriculum)samNo ratings yet
- PTI05Document50 pagesPTI05leonny slNo ratings yet
- Feature PsDocument24 pagesFeature PsGabriel HumpireNo ratings yet
- Reliability Focused Maintenance: A Model To Facilitate RCM ConceptsDocument4 pagesReliability Focused Maintenance: A Model To Facilitate RCM ConceptsamiraautoNo ratings yet
- Software Testing - Best Practice: Testing Checklist The Testing LifecycleDocument1 pageSoftware Testing - Best Practice: Testing Checklist The Testing LifecycleNidal ChoumanNo ratings yet
- Advanced Vehicle Integration & Synthesis Environment (Advise)Document21 pagesAdvanced Vehicle Integration & Synthesis Environment (Advise)DanistergladwinNo ratings yet
- Evaluation Inherent To Educational Planning: TipesDocument3 pagesEvaluation Inherent To Educational Planning: TipesLa Chiqui Chiquinquira AscanioNo ratings yet
- 3.II Method StudyDocument85 pages3.II Method Studyksrao6607100% (4)
- Gender classification CNN approachDocument18 pagesGender classification CNN approachushavalsaNo ratings yet
- Construction Management Mohamed Al Imam 2014Document479 pagesConstruction Management Mohamed Al Imam 2014wesam allabadiNo ratings yet
- Larry Solomon EPAM PresentationDocument33 pagesLarry Solomon EPAM PresentationgamallofNo ratings yet
- Wzn5CtQBRSCM7bSREUUe 20201209 MassMin GeneralDocument90 pagesWzn5CtQBRSCM7bSREUUe 20201209 MassMin GeneralJuan MedinaNo ratings yet
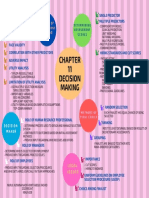
- HRM554 - Mindmap Chapter 11Document1 pageHRM554 - Mindmap Chapter 11Niena RashidNo ratings yet
- Intake Design Process - v1Document1 pageIntake Design Process - v1Angela RaymondNo ratings yet
- Computer Aided Process Planning (CAPP): 2nd EditionFrom EverandComputer Aided Process Planning (CAPP): 2nd EditionNo ratings yet
- Apostolic Exhortation Gaudete Et Exsultate of The Holy Father Francis On The Call To Holiness in Today's WorldDocument9 pagesApostolic Exhortation Gaudete Et Exsultate of The Holy Father Francis On The Call To Holiness in Today's WorldCharlton EddieNo ratings yet
- In Solidarity With Library Genesis and Sci-HubDocument4 pagesIn Solidarity With Library Genesis and Sci-HubCharlton EddieNo ratings yet
- Logicism and Neologicism - Stanford Encyclopedia of PhilosophyDocument39 pagesLogicism and Neologicism - Stanford Encyclopedia of PhilosophyCharlton EddieNo ratings yet
- Sermon by St. Augustine For EasterDocument6 pagesSermon by St. Augustine For EasterCharlton EddieNo ratings yet
- Learn German grammar rules efficiently with Anki flashcardsDocument11 pagesLearn German grammar rules efficiently with Anki flashcardsCharlton EddieNo ratings yet
- The General Instruction On The Liturgy of The Hours: Chapter OneDocument42 pagesThe General Instruction On The Liturgy of The Hours: Chapter OnevassilyhNo ratings yet
- Address of His Holiness Benedict Xvi To The Members of The European People's Party On The Occasion of The Study Days On EuropeDocument3 pagesAddress of His Holiness Benedict Xvi To The Members of The European People's Party On The Occasion of The Study Days On EuropeCharlton EddieNo ratings yet
- Jordan B. Peterson - Template For Writing EssaysDocument24 pagesJordan B. Peterson - Template For Writing EssaysvojarufosiNo ratings yet
- The Age of The Fathers. Vol 2Document623 pagesThe Age of The Fathers. Vol 2Charlton EddieNo ratings yet
- # General Properties D 6$10: # LB D 20: # FT D 6: # FT: # # Section 1 DP $X: # Section 2 D $ X KL 2 KY $ X KL CP $X: # Castigliano'sDocument1 page# General Properties D 6$10: # LB D 20: # FT D 6: # FT: # # Section 1 DP $X: # Section 2 D $ X KL 2 KY $ X KL CP $X: # Castigliano'sCharlton EddieNo ratings yet
- The Interfaith DelusionDocument2 pagesThe Interfaith DelusionCharlton EddieNo ratings yet
- Ear Training Flashcards - Fluent ForeverDocument4 pagesEar Training Flashcards - Fluent ForeverCharlton EddieNo ratings yet
- The General Instruction On The Liturgy of The Hours: Chapter OneDocument42 pagesThe General Instruction On The Liturgy of The Hours: Chapter OnevassilyhNo ratings yet
- Bible Reading GuideDocument2 pagesBible Reading Guidesaddybug528No ratings yet
- Z Z Q R P TB Fxy TT T: Module 1 AssignmentDocument1 pageZ Z Q R P TB Fxy TT T: Module 1 AssignmentCharlton EddieNo ratings yet
- How to can candied pecansDocument1 pageHow to can candied pecansCharlton EddieNo ratings yet
- Introducing Philosophy PrintableDocument16 pagesIntroducing Philosophy PrintableCharlton EddieNo ratings yet
- 8 Ways To Create Better FlashcardsDocument16 pages8 Ways To Create Better FlashcardsCharlton Eddie100% (1)
- MP_C30.qxd 11/23/06 2:36 AM Page 227Document23 pagesMP_C30.qxd 11/23/06 2:36 AM Page 227bridgetmacgabhannNo ratings yet
- The Vocational Rehab AdvantageDocument7 pagesThe Vocational Rehab AdvantageCharlton EddieNo ratings yet
- Ten Tips For Reading College Textbooks: Reading Study Center (920) 424-1031 N/E 201Document2 pagesTen Tips For Reading College Textbooks: Reading Study Center (920) 424-1031 N/E 201fearless10No ratings yet
- Math Symbol DefinitionsDocument1 pageMath Symbol DefinitionsCharlton EddieNo ratings yet
- STAR-CCM+ Rotorcraft Design & Analysis CapabilitiesDocument32 pagesSTAR-CCM+ Rotorcraft Design & Analysis CapabilitiesCharlton EddieNo ratings yet
- Yield CriteriaDocument23 pagesYield CriteriaJuan MNo ratings yet
- Tuesday, March 21, 2017 11:44 PM: My Notes Page 1Document7 pagesTuesday, March 21, 2017 11:44 PM: My Notes Page 1Charlton EddieNo ratings yet
- Mom ThicknessDocument2 pagesMom ThicknessCharlton EddieNo ratings yet
- VK Momentum EqnDocument1 pageVK Momentum EqnsyedmuhammadtariqueNo ratings yet
- The Aerodynamics of GyroplanesDocument356 pagesThe Aerodynamics of GyroplanesCharlton Eddie100% (1)
- Espcm Study Guide TtuDocument5 pagesEspcm Study Guide TtuCharlton EddieNo ratings yet
- Ave Imperatrix, Oscar WildeDocument4 pagesAve Imperatrix, Oscar WildeMerima Mimi DervovićNo ratings yet
- Power System Challenges For Small Satellite MissionsDocument8 pagesPower System Challenges For Small Satellite Missionschandu236100% (2)
- 656656Document6 pages656656kajherNo ratings yet
- JCA Flight Bus Agreement Ensures Crew SafetyDocument3 pagesJCA Flight Bus Agreement Ensures Crew SafetyKINGDOEMSELYNo ratings yet
- Conservation On Natural Resources Proposal: Lucky Taranee A. GeminaDocument12 pagesConservation On Natural Resources Proposal: Lucky Taranee A. GeminaRoen BermejoNo ratings yet
- ATS-B Press KitDocument36 pagesATS-B Press KitBob AndrepontNo ratings yet
- Reference Guide DispatcherDocument34 pagesReference Guide Dispatchera320No ratings yet
- First in The WorldDocument13 pagesFirst in The WorldABHISHEK SinghNo ratings yet
- 2020 Proves d’accés a la universitat Llengua estrangera Anglès Sèrie 1 - ADocument8 pages2020 Proves d’accés a la universitat Llengua estrangera Anglès Sèrie 1 - AperepiNo ratings yet
- Physics Notes PDFDocument82 pagesPhysics Notes PDFnatsdorf100% (4)
- Celestial MechanicsDocument1 pageCelestial MechanicssetyawarnoNo ratings yet
- Disha 1000 Mcq-Pages Geography PDFDocument82 pagesDisha 1000 Mcq-Pages Geography PDFHarshit AroraNo ratings yet
- My Rocket Notes v2Document17 pagesMy Rocket Notes v2mitaarajiniNo ratings yet
- Fuel pump numbers and specifications for various vehicle modelsDocument9 pagesFuel pump numbers and specifications for various vehicle modelsЕвгений М.No ratings yet
- Everything You Need to Know About SpaceDocument15 pagesEverything You Need to Know About SpaceFaizah KawaengNo ratings yet
- Bài đọc -Document16 pagesBài đọc -huynhmy031198No ratings yet
- Solarsystem3-4 Unit Guide PDFDocument9 pagesSolarsystem3-4 Unit Guide PDFRickyRustan RoqueNo ratings yet
- 5600 Circuit DiagramDocument11 pages5600 Circuit DiagramPaulmankeNo ratings yet
- PPM Equipment Capabilities: Lessons From AerospaceDocument17 pagesPPM Equipment Capabilities: Lessons From AerospacerossogeoNo ratings yet
- Turn of PhraseDocument1,108 pagesTurn of Phraseanbinh4uNo ratings yet
- Chapter 7 Science Test 1Document5 pagesChapter 7 Science Test 1api-482402080No ratings yet
- The Privileged Planet-Q S and OverviewDocument9 pagesThe Privileged Planet-Q S and OverviewChad BrosiusNo ratings yet
- Leiderman Apollo 8 Training Capsule 2013 10ppDocument10 pagesLeiderman Apollo 8 Training Capsule 2013 10ppstuart leidermanNo ratings yet
- Vintage Airplane - Nov 1996Document36 pagesVintage Airplane - Nov 1996Aviation/Space History LibraryNo ratings yet
- F3Chapter 3Document25 pagesF3Chapter 3Subash MallampalliNo ratings yet
- Soalan Kepler ObjektifDocument7 pagesSoalan Kepler ObjektifAzeizulNo ratings yet
- Apollo 9 Technical Air-To-Ground Voice TranscriptionDocument853 pagesApollo 9 Technical Air-To-Ground Voice TranscriptionBob AndrepontNo ratings yet
- Opportunity Rover's Record-Breaking Exploration of MarsDocument15 pagesOpportunity Rover's Record-Breaking Exploration of MarsAyush singhNo ratings yet
- Ku-band SATCOM for Predator UAVDocument2 pagesKu-band SATCOM for Predator UAVMohammad Reza MadadiNo ratings yet
- Copernicus Model Gained Acceptance Over Ptolemaic Model Due to Simplicity (39Document3 pagesCopernicus Model Gained Acceptance Over Ptolemaic Model Due to Simplicity (39M.K. TongNo ratings yet