You might also like
- Paper 1 2389 1037Document7 pagesPaper 1 2389 1037Intan Anyelir NursanNo ratings yet
- Birla Vishvakarma Mahavidyalaya: TorsionDocument25 pagesBirla Vishvakarma Mahavidyalaya: TorsionPathan ShahidkhanNo ratings yet
- Twins and Dislocations in HCPDocument46 pagesTwins and Dislocations in HCPthuronNo ratings yet
- Defects in Crystals: Dislocations and Burgers VectorsDocument4 pagesDefects in Crystals: Dislocations and Burgers Vectorsप्रियरंजन सिंह राजपूतNo ratings yet
- Curved Alluvial ChannelsDocument10 pagesCurved Alluvial ChannelsJesús Egor Espinoza RamírezNo ratings yet
- Vector Analysis in ElectromagneticDocument27 pagesVector Analysis in ElectromagneticTrista YxNo ratings yet
- Sample Question Paper For Qualifying Examination (Fluid Dynamics)Document4 pagesSample Question Paper For Qualifying Examination (Fluid Dynamics)Tomble BravoNo ratings yet
- UntitledDocument9 pagesUntitledEdward NaanmaNo ratings yet
- Stress Fields and Energies of DislocationDocument30 pagesStress Fields and Energies of DislocationSiam Abrar SaadNo ratings yet
- 2.dislocations - 1 PDFDocument21 pages2.dislocations - 1 PDFkadambisourabhNo ratings yet
- BEAM DEFLECTION EQUATIONSDocument7 pagesBEAM DEFLECTION EQUATIONSHaftom GebreegziabiherNo ratings yet
- Plastic Deformation. Dislocations and Strengthening MechanismsDocument20 pagesPlastic Deformation. Dislocations and Strengthening MechanismsSanit BhatkarNo ratings yet
- 2.Boundary layer on flat platesDocument62 pages2.Boundary layer on flat platesmegatrotronNo ratings yet
- MORRIS JR., J. W. Overview of Dislocation Plasticity.Document36 pagesMORRIS JR., J. W. Overview of Dislocation Plasticity.Vitor Scarabeli BarbosaNo ratings yet
- Deflection of Beams PDFDocument28 pagesDeflection of Beams PDFBrave Hlulani MabasoNo ratings yet
- Deflection of BeamsDocument7 pagesDeflection of Beamsأحمد عبد الرضا ياسينNo ratings yet
- Beams On Elastic Foundation 2Document8 pagesBeams On Elastic Foundation 2Mauricio Gomes de BarrosNo ratings yet
- CH 12Document118 pagesCH 12Priyanka CholletiNo ratings yet
- Deflection of Beams ExplainedDocument70 pagesDeflection of Beams ExplainedShavin ChandNo ratings yet
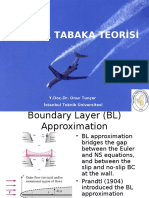
- Sinir Tabaka Teorisi: Y.Doç - Dr. Onur Tunçer İstanbul Teknik ÜniversitesiDocument22 pagesSinir Tabaka Teorisi: Y.Doç - Dr. Onur Tunçer İstanbul Teknik ÜniversitesiHasan Kayhan KayadelenNo ratings yet
- Crystal Dislocation: Calculation of Cross-Slip Parameters in F.C.C. CrystalsDocument22 pagesCrystal Dislocation: Calculation of Cross-Slip Parameters in F.C.C. CrystalsMary WorkNo ratings yet
- Single CrystalDocument14 pagesSingle CrystalAaditya NaikNo ratings yet
- TutorialDocument2 pagesTutorialdavidolalere7No ratings yet
- SF and BM DiagramsDocument3 pagesSF and BM Diagramsrumabiswas853No ratings yet
- Introductory Mechanics of Materials ReviewDocument0 pagesIntroductory Mechanics of Materials ReviewDr. Madhukar Vable100% (1)
- RC Design PDFDocument58 pagesRC Design PDFZerihun IbrahimNo ratings yet
- CE4070 Structural Modelling Yield Line Analysis of Slab IETDocument18 pagesCE4070 Structural Modelling Yield Line Analysis of Slab IETkartheepan100% (1)
- Deflection of BeamsDocument28 pagesDeflection of BeamsishwaryaNo ratings yet
- MOM Chapter 12 New-EditedDocument36 pagesMOM Chapter 12 New-EditedIvan NgNo ratings yet
- Materi #5-LENDUTAN BALOKDocument20 pagesMateri #5-LENDUTAN BALOKpoppyNo ratings yet
- Hydraulics Study GuideDocument16 pagesHydraulics Study GuideLawrence MoratallaNo ratings yet
- The Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary ConditionsDocument13 pagesThe Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary Conditionsmusic freakNo ratings yet
- The Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary ConditionsDocument13 pagesThe Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary Conditionsmusic freakNo ratings yet
- 69mead MarcusDocument13 pages69mead MarcusPhamNo ratings yet
- Determination of Beam Deflection by Using Double-Integration Method & Residual by RindDocument10 pagesDetermination of Beam Deflection by Using Double-Integration Method & Residual by RindAbdul HafeezNo ratings yet
- Practice Exam2 - SolutionsDocument10 pagesPractice Exam2 - SolutionsRyan KellyNo ratings yet
- NSEP Solved Paper 2008Document11 pagesNSEP Solved Paper 2008ShubhamKhannaNo ratings yet
- IEQ-05 Faults & Folds Notes - ShortDocument15 pagesIEQ-05 Faults & Folds Notes - ShortShubham BansalNo ratings yet
- Potential Flow and Stream FunctionDocument13 pagesPotential Flow and Stream FunctionJA55EENo ratings yet
- 1boundary Layer PDFDocument49 pages1boundary Layer PDFputraNo ratings yet
- Deflection of BeamsDocument14 pagesDeflection of Beamsachyutha_krishnaNo ratings yet
- Differential Equation in Civil EngineeringDocument10 pagesDifferential Equation in Civil EngineeringTony StarkNo ratings yet
- Pan Pearl River Delta Physics Olympiad 2005 Morning SessionDocument5 pagesPan Pearl River Delta Physics Olympiad 2005 Morning SessionShivamNo ratings yet
- Circular PlatesDocument24 pagesCircular PlatesNoushad Bin JamalNo ratings yet
- Report - On The Identification of A VortexDocument7 pagesReport - On The Identification of A VortexPiyush JagasiaNo ratings yet
- Beam Deflection MethodsDocument14 pagesBeam Deflection MethodskishorechakravarthyNo ratings yet
- Dislocations: Edge Dislocation Screw DislocationDocument33 pagesDislocations: Edge Dislocation Screw DislocationDharmendra KumarNo ratings yet
- Theoretical Soil Mechanics Karl Terzaghi 400 526Document127 pagesTheoretical Soil Mechanics Karl Terzaghi 400 526Erick ErickNo ratings yet
- Leung2020 (2) Disc Stack SeparatorDocument12 pagesLeung2020 (2) Disc Stack Separatore.sglm03No ratings yet
- Structural Analysis 7 Structural Analysis 7 Edition in SI Units Edition in SI UnitsDocument25 pagesStructural Analysis 7 Structural Analysis 7 Edition in SI Units Edition in SI UnitsMajhoul HakNo ratings yet
- Beams On Elastic FoundationDocument11 pagesBeams On Elastic FoundationPaucara FreddyNo ratings yet
- Chapter 12 Analysis of Indeterminate Beams and Frames by The Slope-Deflection Method PDFDocument42 pagesChapter 12 Analysis of Indeterminate Beams and Frames by The Slope-Deflection Method PDFYirga BezabehNo ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- Multilinear Functions Of Direction And Their Uses In Differential GeometryFrom EverandMultilinear Functions Of Direction And Their Uses In Differential GeometryNo ratings yet
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- The Mechanics of Water-Wheels - A Guide to the Physics at Work in Water-Wheels with a Horizontal AxisFrom EverandThe Mechanics of Water-Wheels - A Guide to the Physics at Work in Water-Wheels with a Horizontal AxisNo ratings yet
- A Computational Model For The Prediction of Steel HardenabilityDocument12 pagesA Computational Model For The Prediction of Steel HardenabilityfdcarazoNo ratings yet
- Phase DiagramsDocument30 pagesPhase DiagramsjerfmosNo ratings yet
- 5404 22637 1 PBDocument1 page5404 22637 1 PBfdcarazoNo ratings yet
- 1994 PDFDocument93 pages1994 PDFfdcarazoNo ratings yet
- programPM PDFDocument3 pagesprogramPM PDFFernandoNo ratings yet
- Are, Therefore, Not Possible. Please NoteDocument21 pagesAre, Therefore, Not Possible. Please NoteFernandoNo ratings yet
- Ple and NpleDocument2 pagesPle and NplefdcarazoNo ratings yet
- Solidification 2Document20 pagesSolidification 2fdcarazoNo ratings yet
- Abstract CALPHAD 2018 Garcia LauraDocument2 pagesAbstract CALPHAD 2018 Garcia LaurafdcarazoNo ratings yet
- Paper HansenDocument2 pagesPaper HansenfdcarazoNo ratings yet
- mechanicsofMaterialsVol42 2010 pp31 43 PDFDocument13 pagesmechanicsofMaterialsVol42 2010 pp31 43 PDFfdcarazoNo ratings yet
- Fem Approach To Simulating Al QuenchDocument13 pagesFem Approach To Simulating Al QuenchfdcarazoNo ratings yet
- 1 s2.0 S0029801814003023 MainDocument14 pages1 s2.0 S0029801814003023 MainFernandoNo ratings yet
- Four Laws That Drive The Universe: Peter AtkinsDocument48 pagesFour Laws That Drive The Universe: Peter AtkinsfdcarazoNo ratings yet
- Divergent Pearlite in A Manganese Eutectoid Steel 1963 Acta MetallurgicaDocument14 pagesDivergent Pearlite in A Manganese Eutectoid Steel 1963 Acta MetallurgicafdcarazoNo ratings yet
- Takaki 2013Document12 pagesTakaki 2013fdcarazoNo ratings yet
- Thermo-Mechanical Consequences of Phase Transformations in The Heat-Affected Zone Using A Cyclic Uniaxial TestDocument22 pagesThermo-Mechanical Consequences of Phase Transformations in The Heat-Affected Zone Using A Cyclic Uniaxial TestfdcarazoNo ratings yet
- 8i3a Review On Jominy Test and Determination of Effect of Alloying Elements On Hardenability of Steel Using Jominy End Quench Test Copyright IjaetDocument7 pages8i3a Review On Jominy Test and Determination of Effect of Alloying Elements On Hardenability of Steel Using Jominy End Quench Test Copyright IjaetPraveen SpNo ratings yet
- Document 3Document91 pagesDocument 3fdcarazoNo ratings yet
- Document 3Document91 pagesDocument 3fdcarazoNo ratings yet
- Complementary Use of Transmission Electron Microscopy and Atom Probe Tomography For The Investigation of Steels Nanostructured by Severe Plastic DeforDocument6 pagesComplementary Use of Transmission Electron Microscopy and Atom Probe Tomography For The Investigation of Steels Nanostructured by Severe Plastic DeforfdcarazoNo ratings yet
- Stored Energy and Structure in Top Down Processed Nanostructured Metals 2009 Scripta MaterialiaDocument6 pagesStored Energy and Structure in Top Down Processed Nanostructured Metals 2009 Scripta MaterialiafdcarazoNo ratings yet
- New Thermomechanical Hot Rolling Schedule For The Processing of High Strength Fine Grained Multiphase SteelsDocument14 pagesNew Thermomechanical Hot Rolling Schedule For The Processing of High Strength Fine Grained Multiphase SteelsfdcarazoNo ratings yet
- Model - Martensite To Austenite Phase Transformation Kinetics in An Ultrafine-Grained Metastable Austenitic Stainless Steel - Acta 2011Document11 pagesModel - Martensite To Austenite Phase Transformation Kinetics in An Ultrafine-Grained Metastable Austenitic Stainless Steel - Acta 2011fdcarazoNo ratings yet
- A New Route To Fabricate Ultrafine Grained Structures in Carbon Steels Without Severe Plastic Deformation 2009 Scripta MaterialiaDocument4 pagesA New Route To Fabricate Ultrafine Grained Structures in Carbon Steels Without Severe Plastic Deformation 2009 Scripta MaterialiafdcarazoNo ratings yet
- 1 s2.0 S1359645402002604 MainDocument13 pages1 s2.0 S1359645402002604 MainfdcarazoNo ratings yet
- Hot-Rolling and Microstructure Model for Dual-Phase SteelsDocument31 pagesHot-Rolling and Microstructure Model for Dual-Phase SteelsfdcarazoNo ratings yet
- New Thermomechanical Hot Rolling Schedule For The Processing of High Strength Fine Grained Multiphase SteelsDocument14 pagesNew Thermomechanical Hot Rolling Schedule For The Processing of High Strength Fine Grained Multiphase SteelsfdcarazoNo ratings yet
- 8 PDFDocument4 pages8 PDFfdcarazoNo ratings yet
- 3a4 0946Document5 pages3a4 0946fdcarazoNo ratings yet
- IB Phys6 1 Planning TiDocument3 pagesIB Phys6 1 Planning TiAlper KarayelNo ratings yet
- Computational Physics - Fortran Version - Koonin PDFDocument660 pagesComputational Physics - Fortran Version - Koonin PDFJosé Roberto LessaNo ratings yet
- Mohr's Theorem and Corollaries PDFDocument8 pagesMohr's Theorem and Corollaries PDFEvaNo ratings yet
- Geometric Design of Linkages J Michael 27006480Document2 pagesGeometric Design of Linkages J Michael 27006480warekarNo ratings yet
- Angles and Polygons Resit TestDocument8 pagesAngles and Polygons Resit Testapi-461267688No ratings yet
- Comparitive Study of Various Watermarking TechniquesDocument7 pagesComparitive Study of Various Watermarking TechniquesHitanshi SachdevaNo ratings yet
- Seismic Analysis of Steel Storage Tanks, OverviewDocument14 pagesSeismic Analysis of Steel Storage Tanks, OverviewRodolfo CNo ratings yet
- ZTEC Instruments ZT - 4610-f - Dig Storage Scopes - Data Sheet PDFDocument16 pagesZTEC Instruments ZT - 4610-f - Dig Storage Scopes - Data Sheet PDFchaparalNo ratings yet
- Answers pt1 PDFDocument33 pagesAnswers pt1 PDFJason SchellerNo ratings yet
- Thermodynamics FundamentalsDocument40 pagesThermodynamics Fundamentalsengineer63No ratings yet
- Statistik Deskriptif N: Minimum Maximum Mean Std. DeviationDocument7 pagesStatistik Deskriptif N: Minimum Maximum Mean Std. DeviationLKP KHAFANo ratings yet
- Science 7 Quarter 3 LAS 1 Key To CorrectionDocument2 pagesScience 7 Quarter 3 LAS 1 Key To CorrectionCharina SatoNo ratings yet
- Electrical Engineering - Frame WorkDocument10 pagesElectrical Engineering - Frame WorkMocharu ArtNo ratings yet
- Power Meter ME96NSR Modbus Type Instruction ManualDocument0 pagesPower Meter ME96NSR Modbus Type Instruction ManualAndrew MaverickNo ratings yet
- Risk Management in Construction Project ManagementDocument8 pagesRisk Management in Construction Project ManagementShakil AhmedNo ratings yet
- Answer of IKMC 2010Document1 pageAnswer of IKMC 2010Minh PhươngNo ratings yet
- Gtu Micro Processor PracticalDocument79 pagesGtu Micro Processor Practicalbaba100% (1)
- Sample Midterm Exam QuestionsDocument13 pagesSample Midterm Exam QuestionsA KNo ratings yet
- Determining Beta Factor For A 2N2222 TransistorDocument2 pagesDetermining Beta Factor For A 2N2222 TransistorJuan Carlos Morales ParraNo ratings yet
- Digital Controller Design For Buck and Boost Converters Using Root Locus TechniquesDocument6 pagesDigital Controller Design For Buck and Boost Converters Using Root Locus Techniquesprasanna workcloudNo ratings yet
- Ac7101 3DDocument24 pagesAc7101 3DNamelezz ShadowwNo ratings yet
- Physics 1C Midterm With SolutionDocument9 pagesPhysics 1C Midterm With SolutionSarita DokaniaNo ratings yet
- ChartsDocument1 pageChartsravikumarmgowdaNo ratings yet
- Detailed LP Dela Cruz FFFDocument8 pagesDetailed LP Dela Cruz FFFJaysan Dela CruzNo ratings yet
- Exercise 1 PDFDocument8 pagesExercise 1 PDFLeong Yue HanNo ratings yet
- (AMC8) Permutations and CombinationsDocument4 pages(AMC8) Permutations and CombinationsNam NGUYENNo ratings yet
- Alfa Laval Flow Transmitter Product LeafletDocument4 pagesAlfa Laval Flow Transmitter Product LeafletsanjeevNo ratings yet
- Sample Code FM Based ExtractorDocument7 pagesSample Code FM Based ExtractorVikas Gautam100% (2)
- Java Lab ManualDocument58 pagesJava Lab ManualViswaprem CANo ratings yet
- Grade 3 Grand Finals Contest Problems: Chọn câu trả lời đúngDocument2 pagesGrade 3 Grand Finals Contest Problems: Chọn câu trả lời đúngHoa NguyễnNo ratings yet