You might also like
- EGR-Systems For Diesel Engines: Simon ReifarthDocument57 pagesEGR-Systems For Diesel Engines: Simon ReifarthifyNo ratings yet
- Literature SurveyDocument7 pagesLiterature SurveyifyNo ratings yet
- Rajoli Veera Reddy Padmaja Engineering College For Women: GPS Based Border Alert System ForDocument15 pagesRajoli Veera Reddy Padmaja Engineering College For Women: GPS Based Border Alert System ForifyNo ratings yet
- An Opportunistic Transmission Mechanism For Seamless Video Streaming in The MIMO-capable Wireless Ad Hoc NetworkDocument5 pagesAn Opportunistic Transmission Mechanism For Seamless Video Streaming in The MIMO-capable Wireless Ad Hoc NetworkifyNo ratings yet
- Rack and Pinion Gears InformationDocument6 pagesRack and Pinion Gears InformationifyNo ratings yet
- Project General DescriptionDocument6 pagesProject General DescriptionifyNo ratings yet
- Final Report On Electric Car Jack 3 PDFDocument30 pagesFinal Report On Electric Car Jack 3 PDFify100% (2)
- Automatic Rain Operated WiperDocument12 pagesAutomatic Rain Operated WiperifyNo ratings yet
- Hommalai 2015Document5 pagesHommalai 2015ifyNo ratings yet
- Introduction To GearsDocument71 pagesIntroduction To GearsifyNo ratings yet
- Literature SurveyDocument9 pagesLiterature SurveyifyNo ratings yet
- Abb Rev AtionsDocument1 pageAbb Rev AtionsifyNo ratings yet
- Different Types of The Pneumatic CylinderDocument10 pagesDifferent Types of The Pneumatic CylinderifyNo ratings yet
- Voice Guidance System For Blind in Traffic Signal, Bus Monitoring and Obstacle Identification by Using Ultrasonic SensorDocument4 pagesVoice Guidance System For Blind in Traffic Signal, Bus Monitoring and Obstacle Identification by Using Ultrasonic SensorifyNo ratings yet
- Battery Monitoring System Using Microcontroller: S. N. Patil Sangmeshwar S. KendreDocument4 pagesBattery Monitoring System Using Microcontroller: S. N. Patil Sangmeshwar S. KendreifyNo ratings yet
- Traffic Signal Time Analysis and Voice - Based App For Visually Impaired PedestriansDocument4 pagesTraffic Signal Time Analysis and Voice - Based App For Visually Impaired PedestriansifyNo ratings yet
- Automation of Drilling Process Using Electro-Pneumatics SystemDocument5 pagesAutomation of Drilling Process Using Electro-Pneumatics SystemifyNo ratings yet
- Ijetae 0415 85Document4 pagesIjetae 0415 85ifyNo ratings yet
- TitlesDocument1 pageTitlesifyNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Parts Manual NDR 030 AE, NR 035 AE, NR 040 AE, NR 045 AE (C815) NS 040 AF, NS 050 AF (C816)Document232 pagesParts Manual NDR 030 AE, NR 035 AE, NR 040 AE, NR 045 AE (C815) NS 040 AF, NS 050 AF (C816)Erisson100% (5)
- Updated List of Accredited Motorshop RGM 2Document17 pagesUpdated List of Accredited Motorshop RGM 2edwincababellaNo ratings yet
- Vikash Choudhary Training ReportDocument43 pagesVikash Choudhary Training ReportAbhishek SharmaNo ratings yet
- Project Report PDFDocument4 pagesProject Report PDFPradeep VermaNo ratings yet
- Item Master Form: Tab/Side Buttons Field Group Field TypeDocument32 pagesItem Master Form: Tab/Side Buttons Field Group Field TypeniravmodyNo ratings yet
- 3rd IAHR 1975 Hanover-AllDocument618 pages3rd IAHR 1975 Hanover-AllAnonymous ZO1piE3VNo ratings yet
- Life, Works, Writings of Jose Rizal (Chapter 2 Handout For Quiz)Document2 pagesLife, Works, Writings of Jose Rizal (Chapter 2 Handout For Quiz)Mark UgsidNo ratings yet
- CANbusDocument5 pagesCANbusRoberto Paredes100% (2)
- Hyundai Manual de Taller Hyundai h100Document124 pagesHyundai Manual de Taller Hyundai h100Gustavo Carvajal Contreras100% (6)
- MHE ChecklistDocument7 pagesMHE ChecklistJesonNo ratings yet
- 2nd PU English Model QP 4 PDFDocument8 pages2nd PU English Model QP 4 PDFPrasad C M100% (8)
- RMTMP GokulgangaDocument60 pagesRMTMP GokulgangaShekhar ChapagainNo ratings yet
- Soal No.60 Marlins ReadingDocument5 pagesSoal No.60 Marlins ReadingEPEKNo ratings yet
- 1988 Toyota Mr2 Aw11 Repair Manual WDocument1,065 pages1988 Toyota Mr2 Aw11 Repair Manual WDonoven KornelsenNo ratings yet
- Current Affairs ENGLISH, Month of JULY' 2023 With Cover PageDocument38 pagesCurrent Affairs ENGLISH, Month of JULY' 2023 With Cover Pagenidhi017llmNo ratings yet
- CD150MDocument2 pagesCD150MVentasVarias AntofaNo ratings yet
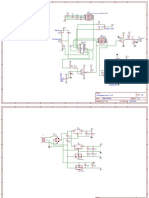
- Schematic Function Gen Part 1Document2 pagesSchematic Function Gen Part 1pecceriniNo ratings yet
- Handbook DL-7 PDFDocument96 pagesHandbook DL-7 PDFMrYimagu2017No ratings yet
- Lamborghini Murcielago SV LP 670 4 Spare Parts 2010Document20 pagesLamborghini Murcielago SV LP 670 4 Spare Parts 2010christina100% (38)
- Critical Infrastructure Projects by Department - 3/28/23Document11 pagesCritical Infrastructure Projects by Department - 3/28/23WVXU NewsNo ratings yet
- Rab Rumah SederhanaDocument42 pagesRab Rumah Sederhanawahyu ardiyantaNo ratings yet
- 2013 University of Cincinnati Baja SAE DrivetrainDocument37 pages2013 University of Cincinnati Baja SAE Drivetrainmikael bezerra cotias dos santosNo ratings yet
- Considerations For Implementing Maintenance Line Operations Safety Assessments (M-LOSA)Document38 pagesConsiderations For Implementing Maintenance Line Operations Safety Assessments (M-LOSA)raj6062No ratings yet
- Grammar 1Document26 pagesGrammar 1ThucNguyenNgoc100% (1)
- 2020 Fan Clutch CatalogDocument112 pages2020 Fan Clutch CatalogYORLENIS SOSANo ratings yet
- Mini Hydro Project InfoDocument10 pagesMini Hydro Project InfoLi LiuNo ratings yet
- Flyer Actualizado Kits de Reparación para Motores CatDocument2 pagesFlyer Actualizado Kits de Reparación para Motores CatPablo Luis Pérez PostigoNo ratings yet
- VMRDA Master Plan Approval GazetteDocument39 pagesVMRDA Master Plan Approval GazetteAvinash KumarNo ratings yet
- The Fertilisers and Chemicals Travancore LimitedDocument31 pagesThe Fertilisers and Chemicals Travancore LimitedBrandon AllenNo ratings yet
- Xenon Iv Gyrocopter: The Future of Ultralight AviationDocument16 pagesXenon Iv Gyrocopter: The Future of Ultralight Aviationben bilmemNo ratings yet