You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 100 Practical Exercises in Music Composition 0190057246 9780190057244 Compress 1Document50 pages100 Practical Exercises in Music Composition 0190057246 9780190057244 Compress 1Lê Thanh XuânNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Pipe StackingDocument2 pagesPipe StackingUghojor ElohoNo ratings yet
- Specifications: FANUC Series 16/18-MB/TB/MC/TC FANUC Series 16Document15 pagesSpecifications: FANUC Series 16/18-MB/TB/MC/TC FANUC Series 16avalente112No ratings yet
- Customer Lifetime Value ModelsDocument50 pagesCustomer Lifetime Value Modelspraveen_bpgcNo ratings yet
- 1223 Usp 33 MicrobiologyvalidationDocument19 pages1223 Usp 33 Microbiologyvalidationعبدالعزيز بدرNo ratings yet
- 2023 Key Stage 2 Mathematics Braille Transcript Paper 1 ArithmeticDocument8 pages2023 Key Stage 2 Mathematics Braille Transcript Paper 1 ArithmeticMini WorldNo ratings yet
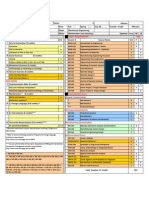
- General Education Major Requirements: Web: HTTP://WWW - Ccsu.edu/page - CFM?P 6656Document2 pagesGeneral Education Major Requirements: Web: HTTP://WWW - Ccsu.edu/page - CFM?P 6656AndrewJariErickNo ratings yet
- Dijkstra DemoDocument20 pagesDijkstra DemosudhanNo ratings yet
- Data VisualizationDocument17 pagesData VisualizationShakti RajputNo ratings yet
- Cryptool LabDocument11 pagesCryptool Labimbo9No ratings yet
- Soil Mechanics Laboratory Report Lab #2 - Atterberg LimitsDocument4 pagesSoil Mechanics Laboratory Report Lab #2 - Atterberg LimitsAndrew ChapmanNo ratings yet
- OB1Document4 pagesOB1Alexander TenorioNo ratings yet
- CopyrightDocument2 pagesCopyrightJJNo ratings yet
- 2016 SFN SyllabusDocument85 pages2016 SFN SyllabusogkdsNo ratings yet
- Class-8 Mathematics (Annual Exam) 2021-22 SET-ADocument2 pagesClass-8 Mathematics (Annual Exam) 2021-22 SET-AAnjali SharmaNo ratings yet
- Pemerintah Kabupaten Pamekasan Cabang Dinas Pendidikan Dan Kebudayaan Kecamatan GalisDocument2 pagesPemerintah Kabupaten Pamekasan Cabang Dinas Pendidikan Dan Kebudayaan Kecamatan GalisMuhamad AminNo ratings yet
- From Monopoles To Textures: A Survey of Topological Defects in Cosmological Quantum Field TheoryDocument7 pagesFrom Monopoles To Textures: A Survey of Topological Defects in Cosmological Quantum Field TheoryDamian SowinskiNo ratings yet
- Multi Step Questions - PowerPointDocument9 pagesMulti Step Questions - PowerPointbrhNo ratings yet
- Ntambwekambuyi 2019Document10 pagesNtambwekambuyi 2019María Pía Arancibia BravoNo ratings yet
- Performance Improvement of A Buck Converter Using Kalman FilterDocument2 pagesPerformance Improvement of A Buck Converter Using Kalman FilterShadNo ratings yet
- Chemistry 12 Tutorial 10 KSP CalculationsDocument12 pagesChemistry 12 Tutorial 10 KSP CalculationsrajNo ratings yet
- Software Protection Using ObfuscationDocument6 pagesSoftware Protection Using ObfuscationAleksaNdarNo ratings yet
- Design of Experiments: Lecture 1: Introduction (CH 1 DAE) Nitin Padhiyar IIT - GandhinagarDocument9 pagesDesign of Experiments: Lecture 1: Introduction (CH 1 DAE) Nitin Padhiyar IIT - GandhinagarShouharda GhoshNo ratings yet
- Disc Springs - Schnorr Handbook (2008)Document151 pagesDisc Springs - Schnorr Handbook (2008)RMLNo ratings yet
- Dsa Module 1 - Ktustudents - inDocument13 pagesDsa Module 1 - Ktustudents - inDivyes PNo ratings yet
- AnchoringDocument19 pagesAnchoringviboralunaNo ratings yet
- Programs On Loops: A-35 Python AssingmentDocument12 pagesPrograms On Loops: A-35 Python AssingmentA- 08 KaushikiNo ratings yet
- Q2 - W7 - 8 - Solving Systems of Linear EquationsDocument13 pagesQ2 - W7 - 8 - Solving Systems of Linear EquationsatNo ratings yet
- Physics Chapter-1 Questions : Made By: M.farhan The Physics Teacher: Wahidullah HassanDocument5 pagesPhysics Chapter-1 Questions : Made By: M.farhan The Physics Teacher: Wahidullah HassanMohamadNo ratings yet