You might also like
- Types of GearDocument6 pagesTypes of GearMira EvaNo ratings yet
- Principle of Epicyclic GearingDocument11 pagesPrinciple of Epicyclic GearingAnuj AwasthiNo ratings yet
- Unit 6: Stability of Linear Control SystemDocument14 pagesUnit 6: Stability of Linear Control SystemNasrullah YusupNo ratings yet
- Road Performance PDFDocument8 pagesRoad Performance PDFwanawNo ratings yet
- Equation Driven Spur GearDocument4 pagesEquation Driven Spur GearGoutam AcharjeeNo ratings yet
- Helical Gears: DefinitionDocument29 pagesHelical Gears: DefinitionMuthuvel MNo ratings yet
- Master PPT DesignDocument15 pagesMaster PPT DesignUsama Epn Abdelmksoud AhmedNo ratings yet
- Assignment ClutchDocument624 pagesAssignment ClutchSubhash KNo ratings yet
- ClutchesDocument12 pagesClutchesAbebaw AyeleNo ratings yet
- 4-SPEED GEAR BOXDocument17 pages4-SPEED GEAR BOXKhanna Dhinesh100% (1)
- ExperimentsDocument4 pagesExperimentsRohitGuptaNo ratings yet
- Cam Jump Phenomenon-1Document10 pagesCam Jump Phenomenon-1Dhairyasheel Bhutkar100% (1)
- Gear TrainsDocument10 pagesGear TrainsJawad SandhuNo ratings yet
- Final ReportDocument45 pagesFinal ReportKuppu Raj100% (1)
- Machine Element II Chapter SummaryDocument39 pagesMachine Element II Chapter SummaryAbiy Aliye100% (1)
- Mechanics of Machinery 2 - Balancing of Rotating MassesDocument11 pagesMechanics of Machinery 2 - Balancing of Rotating MassesAhmed Zawad ShovonNo ratings yet
- Cone Clutch: Definition, Diagram, Working, Uses (With PDF)Document3 pagesCone Clutch: Definition, Diagram, Working, Uses (With PDF)sameerNo ratings yet
- Design of a Two-Stage GearboxDocument131 pagesDesign of a Two-Stage Gearboxnigusu sisayNo ratings yet
- 02 Coordinate SystemsDocument2 pages02 Coordinate Systemskhiladi2No ratings yet
- Braking SystemDocument21 pagesBraking SystemYash ParmarNo ratings yet
- Babaria Institute OF Technology: Designed By: Husain Y Malek. E. NO:140050119038 ROLL NO:14ME38Document28 pagesBabaria Institute OF Technology: Designed By: Husain Y Malek. E. NO:140050119038 ROLL NO:14ME38necromancer18No ratings yet
- Upto 2010 KomDocument36 pagesUpto 2010 KomRajueswarNo ratings yet
- Design and Analysis of Single Plate ClutchDocument3 pagesDesign and Analysis of Single Plate ClutchChandra Sekar100% (1)
- Ptitchener Gearboxreport FullDocument25 pagesPtitchener Gearboxreport Fullapi-244906204No ratings yet
- Anti Roll BarDocument27 pagesAnti Roll BarU.S. DubeyNo ratings yet
- Mechanics Tutorial - ClutchesDocument0 pagesMechanics Tutorial - ClutchesBen JohnsonNo ratings yet
- Bottle Jack - NewDocument9 pagesBottle Jack - NewWaseneh MuluNo ratings yet
- Gearbox DesignDocument94 pagesGearbox DesignHema KumarNo ratings yet
- Design Project of ShaftDocument37 pagesDesign Project of Shaftniranjanbmazire100% (1)
- ClutchesDocument17 pagesClutchesRanjit RajendranNo ratings yet
- BAHIR DAR UNIVERSITY Mechanical Engineering Internship Project on Centrifugal Water Pump DesignDocument30 pagesBAHIR DAR UNIVERSITY Mechanical Engineering Internship Project on Centrifugal Water Pump DesignADEFRIS BELACHEWNo ratings yet
- PDFDocument70 pagesPDFvarunNo ratings yet
- KOM ProjectDocument15 pagesKOM ProjectArvene Binmer JesaryNo ratings yet
- Report On Four Bar Mechanism of Sewing MachineDocument8 pagesReport On Four Bar Mechanism of Sewing MachineshazedislamNo ratings yet
- Couplings in MechatronicsDocument23 pagesCouplings in MechatronicsRavindra MahadeokarNo ratings yet
- Wheel N AxleDocument11 pagesWheel N AxleCarey FernandesNo ratings yet
- Design of Gear Box Prepared By: Yaried Worku Muket AGMASDocument34 pagesDesign of Gear Box Prepared By: Yaried Worku Muket AGMASyared sitotaw100% (1)
- Experiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshDocument3 pagesExperiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshParas KumbalwarNo ratings yet
- Crank and Slotted Lever Quick Return (Rev2)Document9 pagesCrank and Slotted Lever Quick Return (Rev2)Vipin YadavNo ratings yet
- AT6501 (R-13) Notes PDFDocument131 pagesAT6501 (R-13) Notes PDFAashiq NawinNo ratings yet
- Drive Technology: Rope Winches and GearboxesDocument20 pagesDrive Technology: Rope Winches and GearboxesAnonymous ODKk6IgUJNNo ratings yet
- Experment On Watt and Porter GovernorDocument7 pagesExperment On Watt and Porter GovernorAgare TubeNo ratings yet
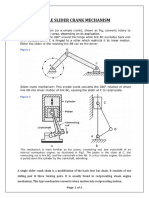
- Single Slider Crank MechanismDocument2 pagesSingle Slider Crank MechanismDeepika Machina0% (1)
- 08 CH-6, Fluid Motion Within Combustion ChamberDocument24 pages08 CH-6, Fluid Motion Within Combustion ChamberAhsan AliNo ratings yet
- Oldham CouplingDocument5 pagesOldham CouplingArsh 837No ratings yet
- Design of Clutch Plate For Light Motor Vehicle NewDocument14 pagesDesign of Clutch Plate For Light Motor Vehicle NewKedar BardeNo ratings yet
- Unit 2 and 3 Mechanics of MachinesDocument21 pagesUnit 2 and 3 Mechanics of MachinesYogaraja JeyarajNo ratings yet
- ME 3170 Lab: Gyroscope ExperimentDocument6 pagesME 3170 Lab: Gyroscope ExperimentHemanth Kumar ANo ratings yet
- Achieving static and dynamic balanceDocument13 pagesAchieving static and dynamic balanceTuanbk NguyenNo ratings yet
- Drive LinesDocument30 pagesDrive LinesRITESH ROHILLANo ratings yet
- Gearboxes ClassDocument35 pagesGearboxes ClassNaveen Vachipalli100% (1)
- Automotive Driveline Overview ExplainedDocument8 pagesAutomotive Driveline Overview ExplainedKarniNo ratings yet
- Basics of Belt DrivesDocument12 pagesBasics of Belt DrivesSrinivasan RaviNo ratings yet
- Klein Technical GuidelineDocument21 pagesKlein Technical GuidelinePeter100% (2)
- Design and Optimization of Front Wheel AssemblyDocument69 pagesDesign and Optimization of Front Wheel Assemblynikhil pandkarNo ratings yet
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Structural Health MonitoringFrom EverandStructural Health MonitoringDaniel BalageasNo ratings yet
- Effects of Caco and Kaolin Filler Loadings On Curing Rates of Polyurethane FoamsDocument19 pagesEffects of Caco and Kaolin Filler Loadings On Curing Rates of Polyurethane Foamspriyankar007No ratings yet
- KinematicsDocument30 pagesKinematicsSabareeswaran MurugesanNo ratings yet
- 2005CON Teaching Gear Theory To StudentsDocument26 pages2005CON Teaching Gear Theory To StudentsManoj Pratap SinghNo ratings yet
- Hybrid Vehicles PDFDocument12 pagesHybrid Vehicles PDFpriyankar007No ratings yet
- Automobile Mid LevelDocument1 pageAutomobile Mid Levelpriyankar007No ratings yet
- Cone ClutchDocument3 pagesCone Clutchpriyankar007No ratings yet
- Energy considerations: II 1 2 1 2 t 1 TI I 1 2 ω − ω = +Document5 pagesEnergy considerations: II 1 2 1 2 t 1 TI I 1 2 ω − ω = +Sunny VermaNo ratings yet
- Gear TrainsDocument19 pagesGear Trainspriyankar007No ratings yet
- Automobile Engineering NotesDocument120 pagesAutomobile Engineering Notesakshay2992No ratings yet
- Fluid CouplingDocument3 pagesFluid Couplingpriyankar007No ratings yet
- B. Tech. Automobile EngineeringDocument128 pagesB. Tech. Automobile Engineeringsharmamohana19946511No ratings yet
- CAD CAM CAE LabDocument1 pageCAD CAM CAE Labpriyankar007No ratings yet
- Electromagnetic Clutch System Full Seminar Report 4537Document30 pagesElectromagnetic Clutch System Full Seminar Report 4537Lalit Tanan100% (1)
- VSDC Adams Rover ModelDocument2 pagesVSDC Adams Rover Modelpriyankar007No ratings yet
- BrakesDocument11 pagesBrakesSiddartth M KumaarNo ratings yet
- Catia V5 Interview Q&ADocument3 pagesCatia V5 Interview Q&Apriyankar007No ratings yet
- 07 Thermal StressDocument13 pages07 Thermal StressSundaravathanan ChellappanNo ratings yet
- Questions On AssemblyDocument2 pagesQuestions On Assemblypriyankar007No ratings yet
- Chapter 1: Standards of MeasurementDocument18 pagesChapter 1: Standards of MeasurementStelwin FernandezNo ratings yet
- The Oxford College of Engineering Bommanahalli, Hosur Road, Bangalore-560068Document1 pageThe Oxford College of Engineering Bommanahalli, Hosur Road, Bangalore-560068priyankar007No ratings yet
- Uses of ComparatorsDocument9 pagesUses of Comparatorspriyankar007100% (1)
- ENotes - Manufacturing ProcessesDocument9 pagesENotes - Manufacturing Processespriyankar007No ratings yet
- Unit 8 Lecturer Notes of Games Theory of or by Narahari RVCE, BaDocument15 pagesUnit 8 Lecturer Notes of Games Theory of or by Narahari RVCE, BaSanthosh MalavalliNo ratings yet
- Me2309 Lab Manual - 8Document39 pagesMe2309 Lab Manual - 89600257003No ratings yet
- Orthographic Projection WWW - Helenhudspith.com Slash Resources Slash Graphics Slash John - H Slash OrthographicDocument26 pagesOrthographic Projection WWW - Helenhudspith.com Slash Resources Slash Graphics Slash John - H Slash Orthographicpriyankar007No ratings yet
- Big Notes - MetrologyDocument17 pagesBig Notes - Metrologypriyankar007No ratings yet
- WEB Transportation ProblemDocument11 pagesWEB Transportation ProblemskchavanNo ratings yet
- Advantages and Disadvantages of Various Types of Comparators (Metrology)Document4 pagesAdvantages and Disadvantages of Various Types of Comparators (Metrology)priyankar007No ratings yet
- Aptitude Test 3 - QuestionsDocument5 pagesAptitude Test 3 - Questionspriyankar007No ratings yet
- Monroes Motivated Sequence LessonDocument3 pagesMonroes Motivated Sequence Lessonapi-257123630No ratings yet
- 6 Grade English Language Arts and Reading Pre APDocument3 pages6 Grade English Language Arts and Reading Pre APapi-291598026No ratings yet
- Slides Iso 17021 Be LacDocument117 pagesSlides Iso 17021 Be Lacjorge.s1943No ratings yet
- (Ebook - PDF - Cisco Press) DNS, DHCP and IP Address ManagementDocument29 pages(Ebook - PDF - Cisco Press) DNS, DHCP and IP Address ManagementRachele AlbiottiNo ratings yet
- India MedTech 23 CompendiumDocument326 pagesIndia MedTech 23 Compendiumudiptya_papai2007No ratings yet
- Research On Water Distribution NetworkDocument9 pagesResearch On Water Distribution NetworkVikas PathakNo ratings yet
- The Grand Landscape - Ian PlantDocument145 pagesThe Grand Landscape - Ian PlantJohanny Bravo100% (1)
- Solid Waste Management Center RevisedDocument44 pagesSolid Waste Management Center RevisedPrimo Ernesto CanoyNo ratings yet
- Eichhornia Crassipes or Water HyacinthDocument5 pagesEichhornia Crassipes or Water HyacinthJamilah AbdulmaguidNo ratings yet
- Script in Conduct Competency AssessmentDocument4 pagesScript in Conduct Competency AssessmentJane Dagpin100% (1)
- Abcdef Ghijkl Mnopq Rstuv Wxyz Alphabet Backpack Book Bookcase CalculatorDocument4 pagesAbcdef Ghijkl Mnopq Rstuv Wxyz Alphabet Backpack Book Bookcase Calculatornutka88No ratings yet
- ISO 18794. Café. Análisis Sensorial. Vocabulario. Ingles PDFDocument16 pagesISO 18794. Café. Análisis Sensorial. Vocabulario. Ingles PDFluigi sanchezNo ratings yet
- Behold The Lamb of GodDocument225 pagesBehold The Lamb of GodLinda Moss GormanNo ratings yet
- Astrolada - Astrology Elements in CompatibilityDocument6 pagesAstrolada - Astrology Elements in CompatibilitySilviaNo ratings yet
- Indonesian Hotel Annual ReviewDocument34 pagesIndonesian Hotel Annual ReviewSPHM HospitalityNo ratings yet
- Activity 1.docx AjDocument2 pagesActivity 1.docx AjMaya BabaoNo ratings yet
- Service: Audi A6 2011 Audi A7 Sportback 2011Document160 pagesService: Audi A6 2011 Audi A7 Sportback 2011Javier SerranoNo ratings yet
- MySQL Backups Go Near-ContinuousDocument43 pagesMySQL Backups Go Near-ContinuousOleksiy KovyrinNo ratings yet
- Write EssayDocument141 pagesWrite Essayamsyous100% (1)
- School Name Address Contact No. List of Formal Schools: WebsiteDocument8 pagesSchool Name Address Contact No. List of Formal Schools: WebsiteShravya NEMELAKANTINo ratings yet
- Development of Overall Audit StrategyDocument4 pagesDevelopment of Overall Audit StrategyPhrexilyn PajarilloNo ratings yet
- Cleavage (Geology) : Structural Geology Petrology MetamorphismDocument4 pagesCleavage (Geology) : Structural Geology Petrology MetamorphismNehaNo ratings yet
- The Cambridge Guide To Pedagogy and Practice in Second Language TeachingDocument4 pagesThe Cambridge Guide To Pedagogy and Practice in Second Language TeachingJessica GomesNo ratings yet
- DECIDE ChecklistDocument2 pagesDECIDE ChecklistGuilioNo ratings yet
- Jene Sys 2016 ApplicationformDocument4 pagesJene Sys 2016 ApplicationformReva WiratamaNo ratings yet
- Enclosure No. 6.7: Parental ConsentDocument3 pagesEnclosure No. 6.7: Parental ConsentRhea CarinoNo ratings yet
- Bulletin 13.9.22Document4 pagesBulletin 13.9.22dbq088sNo ratings yet
- Pageant Questions For Miss IntramuralsDocument2 pagesPageant Questions For Miss Intramuralsqueen baguinaon86% (29)
- Work of Juan TamarizDocument6 pagesWork of Juan Tamarizmrbookman3No ratings yet
- Chapter 4.1 Decision Theory Part 2Document38 pagesChapter 4.1 Decision Theory Part 2ernieNo ratings yet