You might also like
- Linear Solenoid GuideDocument20 pagesLinear Solenoid GuideAndrei ReventNo ratings yet
- Nuclear Power Reactors: UraniumDocument13 pagesNuclear Power Reactors: UraniummangyanNo ratings yet
- Induction MotorsDocument51 pagesInduction MotorskhaledchahineNo ratings yet
- Tutorial 6 - Induction MotorDocument2 pagesTutorial 6 - Induction MotorMohdFirdausNo ratings yet
- Maintenance of TransformerDocument8 pagesMaintenance of TransformeranilsinghteslaNo ratings yet
- Control Devices PDFDocument24 pagesControl Devices PDFjonnymarin23No ratings yet
- Single Phase Induction Motors PDFDocument20 pagesSingle Phase Induction Motors PDFAmitava BiswasNo ratings yet
- AC Induction Motor SlipDocument6 pagesAC Induction Motor SlipnotastudentNo ratings yet
- AC Motor: From Wikipedia, The Free EncyclopediaDocument9 pagesAC Motor: From Wikipedia, The Free EncyclopediaiimtpawanNo ratings yet
- Generac - Gen Insulation ClassDocument4 pagesGenerac - Gen Insulation Class6609503100% (1)
- AC Electric Machines Lab ManulDocument98 pagesAC Electric Machines Lab Manulmuhammad_sarwar_27No ratings yet
- 6b Motor Nameplate Handout.325 PDFDocument19 pages6b Motor Nameplate Handout.325 PDFAntonius DickyNo ratings yet
- Generator TheoryDocument4 pagesGenerator TheoryRachit KhannaNo ratings yet
- Speed Control IM (Edited)Document37 pagesSpeed Control IM (Edited)مصطفى حمدىNo ratings yet
- 6.1 Leakage Flux and Leakage InductanceDocument29 pages6.1 Leakage Flux and Leakage InductancePrema ElizabethNo ratings yet
- Direct On Line DOL Motor Starter PDFDocument7 pagesDirect On Line DOL Motor Starter PDFVasudev AgrawalNo ratings yet
- Transformer Faults ExplainedDocument19 pagesTransformer Faults Explaineddattatray kulkarniNo ratings yet
- 6 Adjustable Tripping Settings of A Circuit BreakerDocument14 pages6 Adjustable Tripping Settings of A Circuit BreakerBENJAMIN DULAYNo ratings yet
- DC GeneratorDocument38 pagesDC Generatoraswardi8756No ratings yet
- Electrical Engineering QUESTION BANKDocument7 pagesElectrical Engineering QUESTION BANKMATHANKUMAR.S100% (1)
- Ee 591 Machine 2 PDFDocument39 pagesEe 591 Machine 2 PDFPrabhat Kumar SahuNo ratings yet
- DC GENERATOR Final 1Document9 pagesDC GENERATOR Final 1Jhess GaliciaNo ratings yet
- Basic Electrical Engineering EE-101 Tutorial + Assignment - 4 Topic: - Three PhaseDocument1 pageBasic Electrical Engineering EE-101 Tutorial + Assignment - 4 Topic: - Three PhaseSH RanaNo ratings yet
- A.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryDocument5 pagesA.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryCønstäh Van Der WüppertälärîanskíhNo ratings yet
- ABB RET 521 TRANS DIFFERENTIAL PROTECTION INSTALLATION and COMMISSIONING MANUALDocument67 pagesABB RET 521 TRANS DIFFERENTIAL PROTECTION INSTALLATION and COMMISSIONING MANUALNima Mahmoudpour100% (1)
- Eec 752 Electronic Circuit Design LabDocument1 pageEec 752 Electronic Circuit Design LabAnonymous eWMnRr70q75% (4)
- Motors and The NECDocument7 pagesMotors and The NECjonathandacumosNo ratings yet
- 8 - DC Machines FundDocument20 pages8 - DC Machines FundSamiNo ratings yet
- A Presentation ON Overhead Line Insulators Faculty: Gunjan VarshneyDocument67 pagesA Presentation ON Overhead Line Insulators Faculty: Gunjan VarshneyGunjan VarshneyNo ratings yet
- Record Plus Catalogue EnglishDocument256 pagesRecord Plus Catalogue EnglishluxofNo ratings yet
- Structure of Electrical Power SystemDocument13 pagesStructure of Electrical Power SystemBelayneh TadesseNo ratings yet
- DC Motor ObjectivesDocument13 pagesDC Motor ObjectivesAvik PoudelNo ratings yet
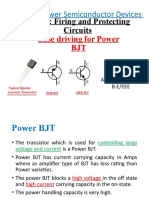
- Advanced Power BJT Base Driving CircuitsDocument16 pagesAdvanced Power BJT Base Driving CircuitsSachin SivaNo ratings yet
- Qcs 2010 Section 21 Part 5 Variable Speed Controllers PDFDocument8 pagesQcs 2010 Section 21 Part 5 Variable Speed Controllers PDFbryanpastor106No ratings yet
- Special Purpose MotorsDocument16 pagesSpecial Purpose MotorsHari ReddyNo ratings yet
- Star-Delta Starter: Electrical Notes & ArticlesDocument25 pagesStar-Delta Starter: Electrical Notes & Articlesprabhanshu241991100% (1)
- Chapter 3 Transformer Connections, Operation, and Specialty TransformersDocument38 pagesChapter 3 Transformer Connections, Operation, and Specialty TransformersSihamaSihamNo ratings yet
- Electrical Engineering Safety Final ExamDocument2 pagesElectrical Engineering Safety Final ExamMarielle LopezNo ratings yet
- Z5 DC Compound Wound MotorDocument13 pagesZ5 DC Compound Wound MotorFitri VongolaNo ratings yet
- Time Current CurvesDocument65 pagesTime Current CurvesmuzammiliqbalNo ratings yet
- Induction Machine ReportDocument24 pagesInduction Machine ReportSiddharth NandhanNo ratings yet
- Thyristor Triggering: Figure 1 Thyristor Circuit With Gate ResistorsDocument2 pagesThyristor Triggering: Figure 1 Thyristor Circuit With Gate ResistorsPrincess LandichoNo ratings yet
- Kaizen - Motor Selection GuideDocument11 pagesKaizen - Motor Selection GuideAmory Sabri AsmaroNo ratings yet
- Selection and Maintenance of AC MotorDocument29 pagesSelection and Maintenance of AC MotorPrakash KumarNo ratings yet
- Conductors Damage Curves CablesDocument4 pagesConductors Damage Curves CablesjonathanNo ratings yet
- Lightning Protection in Power SystemsDocument26 pagesLightning Protection in Power SystemsAnikaNo ratings yet
- A Survey of Cold Load Pickup PracticesDocument26 pagesA Survey of Cold Load Pickup PracticestunghtdNo ratings yet
- What Are Partial Discharges On Cast Resin Transformers - EEPDocument3 pagesWhat Are Partial Discharges On Cast Resin Transformers - EEPa_mohid17No ratings yet
- Door Monitor ProjectDocument4 pagesDoor Monitor Projectlekhs_tim10% (1)
- Grounding Systems GuideDocument5 pagesGrounding Systems GuidejosemartinpenatorresNo ratings yet
- Z Bus FaultDocument6 pagesZ Bus FaultSajin SahadevNo ratings yet
- Nuclear Power Plant: Swami Keshvanand Institute of Technology Management & Gramothan, JaipurDocument27 pagesNuclear Power Plant: Swami Keshvanand Institute of Technology Management & Gramothan, JaipurNikhil ChopraNo ratings yet
- Electrical Power Systems: Synchronous GeneratorDocument54 pagesElectrical Power Systems: Synchronous GeneratorNorhatini IbrahimNo ratings yet
- Practical Guide to International Standardization for Electrical Engineers: Impact on Smart Grid and e-Mobility MarketsFrom EverandPractical Guide to International Standardization for Electrical Engineers: Impact on Smart Grid and e-Mobility MarketsNo ratings yet
- Application of Flexible AC Transmission System Devices in Wind Energy Conversion SystemsFrom EverandApplication of Flexible AC Transmission System Devices in Wind Energy Conversion SystemsNo ratings yet
- Flow MeasurementDocument47 pagesFlow MeasurementAshvani ShuklaNo ratings yet
- Orifice PlateDocument18 pagesOrifice PlateAshvani Shukla100% (2)
- Hydro Power PlantDocument19 pagesHydro Power PlantAshvani ShuklaNo ratings yet
- Control SystemDocument23 pagesControl SystemAshvani ShuklaNo ratings yet
- CFBC Boiler Startup and ShutdownDocument42 pagesCFBC Boiler Startup and ShutdownAshvani Shukla100% (1)
- 660MW Turbo Generator & Its AuxiliariesDocument88 pages660MW Turbo Generator & Its AuxiliariesAshvani ShuklaNo ratings yet
- TransformerDocument35 pagesTransformerAshvani Shukla100% (1)
- Thermal Power PlantDocument36 pagesThermal Power PlantAshvani Shukla100% (1)
- CFBC Boiler Startup - Load Operation - ShutdownDocument50 pagesCFBC Boiler Startup - Load Operation - ShutdownAshvani Shukla96% (27)
- Nuclear Power PlantDocument21 pagesNuclear Power PlantAshvani ShuklaNo ratings yet
- Hydro Power PlantDocument19 pagesHydro Power PlantAshvani ShuklaNo ratings yet
- Control SystemDocument23 pagesControl SystemAshvani ShuklaNo ratings yet
- 660 MW Supercritical BoilerDocument89 pages660 MW Supercritical BoilerAshvani Shukla100% (5)
- 660 MW Governing System PresentationDocument49 pages660 MW Governing System Presentationgaurav tiwari100% (1)
- Super-Critical BoilerDocument32 pagesSuper-Critical BoilerAshvani Shukla100% (2)
- ThyristerDocument25 pagesThyristerAshvani Shukla100% (1)
- Semiconductor TechnologyDocument8 pagesSemiconductor TechnologyAshvani ShuklaNo ratings yet
- Unit Lightup Synchronisation & ShutdownDocument42 pagesUnit Lightup Synchronisation & ShutdownAshvani ShuklaNo ratings yet
- Semiconductor DiodeDocument8 pagesSemiconductor DiodeAshvani ShuklaNo ratings yet
- P-N Junction CharacteristicsDocument9 pagesP-N Junction CharacteristicsAshvani ShuklaNo ratings yet
- Furnace Pressure ControlDocument5 pagesFurnace Pressure ControlAshvani ShuklaNo ratings yet
- P-N JUNCTION AshDocument33 pagesP-N JUNCTION AshAshvani ShuklaNo ratings yet
- DC MotorDocument21 pagesDC MotorAshvani ShuklaNo ratings yet
- Introduction of Control EngineeringDocument21 pagesIntroduction of Control EngineeringAshvani ShuklaNo ratings yet
- Drun Level ControlDocument12 pagesDrun Level ControlAshvani ShuklaNo ratings yet
- 660 MW Governing System PresentationDocument49 pages660 MW Governing System Presentationgaurav tiwari100% (1)
- Half Wave Diode RectifireDocument8 pagesHalf Wave Diode RectifireAshvani ShuklaNo ratings yet
- ChopperDocument30 pagesChopperAshvani ShuklaNo ratings yet
- 660MW Turbo Generator & Its AuxiliariesDocument88 pages660MW Turbo Generator & Its AuxiliariesAshvani ShuklaNo ratings yet
- E-Scooter Kaye China 2023Document6 pagesE-Scooter Kaye China 2023risqi ilham zulfahmiNo ratings yet
- Lh25-E08-G02-003 R0 SLD Generator Main Transformer & Line ProtectionDocument1 pageLh25-E08-G02-003 R0 SLD Generator Main Transformer & Line ProtectionasygafNo ratings yet
- 50 TJ 016Document32 pages50 TJ 016hamgasclimatisation100% (1)
- Chapter 1 - Introduction To Pipe Fabrication 5: 3 © Westone Services 2013Document1 pageChapter 1 - Introduction To Pipe Fabrication 5: 3 © Westone Services 2013Mohamed amine El mtalakNo ratings yet
- OPTIKA B-159 Technical Datasheet enDocument2 pagesOPTIKA B-159 Technical Datasheet enPELITA DWI ASANo ratings yet
- Lighting and Appliance or Power PanelboardDocument2 pagesLighting and Appliance or Power Panelboardasi midobarNo ratings yet
- Service Manual: 19" LCD Monitor LM965Document57 pagesService Manual: 19" LCD Monitor LM965danielradu27No ratings yet
- SIEMENSDocument13 pagesSIEMENSDaniela Denisse TRNo ratings yet
- Smart TrolleyDocument24 pagesSmart TrolleyAbdul Razzak100% (1)
- Singer 9020 Sewing Machine ManualDocument44 pagesSinger 9020 Sewing Machine ManualLaughgbudh67% (3)
- DIY Build A Bluetooth 4 Way Footswitch For JamUp ProDocument6 pagesDIY Build A Bluetooth 4 Way Footswitch For JamUp ProHector Herrera ChavezNo ratings yet
- Safety Equipment Inventory ListingDocument311 pagesSafety Equipment Inventory Listinggardamas tunggal primaNo ratings yet
- Circuit breaker test meterDocument5 pagesCircuit breaker test meterpawan deepNo ratings yet
- Group 7 RCV Lever: 1. Removal and InstallDocument19 pagesGroup 7 RCV Lever: 1. Removal and InstallHậu MinhNo ratings yet
- MGTF BrochureDocument36 pagesMGTF BrochureLeather JockNo ratings yet
- Wireless Design For Power Theft Monitoring: Parul Ranjan, Namita Mehra, Prof. T.A. More, Shripad BokandDocument4 pagesWireless Design For Power Theft Monitoring: Parul Ranjan, Namita Mehra, Prof. T.A. More, Shripad BokandAyshwar Venkatesh100% (1)
- Shaper SlottingDocument34 pagesShaper SlottingAamer MohammedNo ratings yet
- Ymz1krvasdlwd 18 30kv CableDocument2 pagesYmz1krvasdlwd 18 30kv CableJosue Crespo GonzalezNo ratings yet
- Dry-Type Transformer TestsDocument39 pagesDry-Type Transformer TestsA.InbarajNo ratings yet
- DatacenterDocument80 pagesDatacenterHany FathyNo ratings yet
- Evolution of Intel Microprocessors PDFDocument2 pagesEvolution of Intel Microprocessors PDFErikaNo ratings yet
- 600/1000V, PVC Insulated Cables According To IEC 60502-1: Kitty@caledonian-Cables - Co.ukDocument11 pages600/1000V, PVC Insulated Cables According To IEC 60502-1: Kitty@caledonian-Cables - Co.ukS.M.Touhidur RahmanNo ratings yet
- T Cross Online BrochureDocument21 pagesT Cross Online BrochureTettsNo ratings yet
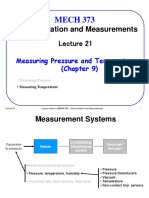
- L21 TemperatureDocument17 pagesL21 Temperaturebaraniinst6875No ratings yet
- Seminar PPT Manisha Gawale (Robotics Motors) - 2Document24 pagesSeminar PPT Manisha Gawale (Robotics Motors) - 2Nehul PatilNo ratings yet
- Buried Filled Cables Type CefeDocument5 pagesBuried Filled Cables Type CefeKhaled BellegdyNo ratings yet
- 1N60 PDFDocument8 pages1N60 PDFmasakpNo ratings yet
- PRO1 10E Introduction Micromaster PDFDocument20 pagesPRO1 10E Introduction Micromaster PDFTinhNguyenNo ratings yet
- Psmaitrey DSP - VI UNIT PDFDocument24 pagesPsmaitrey DSP - VI UNIT PDFSatya KrishnaNo ratings yet
- Injection Pump Calibration Data: Assy No.: 106671-0224Document4 pagesInjection Pump Calibration Data: Assy No.: 106671-0224Elson DorigonNo ratings yet