You might also like
- Advanced Optimization TechniquesDocument21 pagesAdvanced Optimization TechniquesshiekziaNo ratings yet
- Lecture 1: Introduction To Aircraft DesignDocument61 pagesLecture 1: Introduction To Aircraft DesignAgostino De GiuseppeNo ratings yet
- Module 2-Advanced Computational TechniquesDocument27 pagesModule 2-Advanced Computational TechniquesfyzmfaNo ratings yet
- Introduction to Systems EngineeringDocument28 pagesIntroduction to Systems EngineeringAsad AliNo ratings yet
- Nozzle FirstDocument21 pagesNozzle FirstMassive MindsNo ratings yet
- Basic ConceptsDocument27 pagesBasic ConceptsAnshu ShrivastavaNo ratings yet
- LectureNotes (1) - 2Document23 pagesLectureNotes (1) - 2Mohamad FaruqNo ratings yet
- 2012 LSPPDocument112 pages2012 LSPPGrigoras CosminNo ratings yet
- Design Step 3: Evaluation of Alternatives and Selection of A ConceptDocument34 pagesDesign Step 3: Evaluation of Alternatives and Selection of A ConceptTophe EscarezNo ratings yet
- Engine Design2014-Lecture1 PDFDocument32 pagesEngine Design2014-Lecture1 PDFDr-Nouby Mahdy GhazalyNo ratings yet
- Introduction To Optimization: Historical DevelopmentDocument5 pagesIntroduction To Optimization: Historical DevelopmentSaheera HazarikaNo ratings yet
- Optimization MethodsDocument13 pagesOptimization Methodsprasad243243No ratings yet
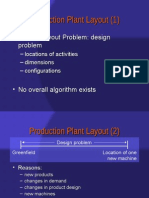
- Optimize Production Plant Layout for EfficiencyDocument64 pagesOptimize Production Plant Layout for EfficiencyUmair AhmedNo ratings yet
- Facility LayoutDocument63 pagesFacility LayoutBharti KumariNo ratings yet
- Module-3 Analysis and Design: Software Development Process OverviewDocument50 pagesModule-3 Analysis and Design: Software Development Process OverviewAishwaryaNo ratings yet
- Ie335 or IntroDocument82 pagesIe335 or IntrotyfnpkrNo ratings yet
- Vehicle Design Lecture1Document31 pagesVehicle Design Lecture1noubyluxorNo ratings yet
- Lec 3Document34 pagesLec 3Ebrahem ShabanaNo ratings yet
- Unit 37: Virtual EngineeringDocument29 pagesUnit 37: Virtual Engineeringamdan srlNo ratings yet
- Transfer to Rank Top-N RecommendationDocument23 pagesTransfer to Rank Top-N RecommendationArcha RajanNo ratings yet
- Design and Analysis of a Cooling System for Solar PanelsDocument19 pagesDesign and Analysis of a Cooling System for Solar PanelsMuhammad MusaNo ratings yet
- Lec 1 Modeling and SimulationDocument29 pagesLec 1 Modeling and SimulationlitrakhanNo ratings yet
- AFRLDocument25 pagesAFRLA.J. MacDonald, Jr.No ratings yet
- Analytical DesignDocument38 pagesAnalytical Designsawyl AHAMEFULA MBANo ratings yet
- Notes - 1059 - Unit IVDocument58 pagesNotes - 1059 - Unit IVNaveen KumarNo ratings yet
- Rkabraha Uwaterloo CA WWW Linkedin COM IN RkabrahamDocument14 pagesRkabraha Uwaterloo CA WWW Linkedin COM IN RkabrahamRejoeNo ratings yet
- MEM 355 Performance Enhancement of Dynamical Systems: Introduction To Control System DesignDocument26 pagesMEM 355 Performance Enhancement of Dynamical Systems: Introduction To Control System DesignmarbonfNo ratings yet
- Applied Mathematics - Elements of Operations Research (Quantitative Methods) 2019/2020Document12 pagesApplied Mathematics - Elements of Operations Research (Quantitative Methods) 2019/2020Sami Onur VuralNo ratings yet
- CSE 303 Lecture on Software Design Methods, Paradigms and Trade-offsDocument35 pagesCSE 303 Lecture on Software Design Methods, Paradigms and Trade-offsZalmi KhanNo ratings yet
- OR UNIT I UmaDocument51 pagesOR UNIT I UmaSanal EkNo ratings yet
- Analysis & DesignDocument50 pagesAnalysis & Designrushabh90No ratings yet
- 03 Analysis Part3Document29 pages03 Analysis Part3Abdelzeam RizkNo ratings yet
- OPTIMIZATION TECHNIQUES IN ELECTRICAL MACHINE DESIGN USING COMPUTER AIDED DESIGNINGDocument53 pagesOPTIMIZATION TECHNIQUES IN ELECTRICAL MACHINE DESIGN USING COMPUTER AIDED DESIGNINGAman GargNo ratings yet
- 07-Ch7-Design ImplementationDocument56 pages07-Ch7-Design ImplementationLong Nguyễn HoàngNo ratings yet
- System Analysis Lec4,5Document38 pagesSystem Analysis Lec4,5Hamada HeshamNo ratings yet
- Setting Up Electronically Controlled Complex SystemsDocument61 pagesSetting Up Electronically Controlled Complex Systemsfrezer mesfin100% (1)
- EML2322L Design ProcessDocument14 pagesEML2322L Design ProcessLalo MtzNo ratings yet
- 1st Lecture (Introduction) ADocument40 pages1st Lecture (Introduction) AAlaa100% (1)
- Query Optimization TechniquesDocument42 pagesQuery Optimization TechniquesNoel GirmaNo ratings yet
- UAV System Design - IntroductionDocument47 pagesUAV System Design - IntroductionVijayanandh RNo ratings yet
- Lecture Notes On Optimization MethodsDocument252 pagesLecture Notes On Optimization MethodsA.Benhari100% (13)
- Introduction To Computational HydraulicsDocument33 pagesIntroduction To Computational HydraulicsDatz SorianoNo ratings yet
- FODA Feature-Oriented Domain Analysis Feasibility StudyDocument41 pagesFODA Feature-Oriented Domain Analysis Feasibility StudyAntares OrionNo ratings yet
- Mechanical System Design - DR - NGDocument60 pagesMechanical System Design - DR - NGamarnath grNo ratings yet
- Complexity Revisited - Learning From FailuresDocument25 pagesComplexity Revisited - Learning From Failuresjwpaprk1No ratings yet
- Refactoring and Design PatternsDocument52 pagesRefactoring and Design PatternsJulio CesarNo ratings yet
- CSE-304 Object Oriented Software Engineering CourseDocument40 pagesCSE-304 Object Oriented Software Engineering CourseSaleem IqbalNo ratings yet
- SPM Unit-2 Part-1Document19 pagesSPM Unit-2 Part-1agrawaldeepti917No ratings yet
- Distributed Querry OptimizationDocument4 pagesDistributed Querry OptimizationSyed Muhammad Junaid HassanNo ratings yet
- MD I - Unit I - PSSDocument31 pagesMD I - Unit I - PSSNihar ApteNo ratings yet
- Integration Testing TechniquesDocument39 pagesIntegration Testing TechniquesAbhinav AbzNo ratings yet
- Discrete Event Simulation Book by Jerry BanksDocument325 pagesDiscrete Event Simulation Book by Jerry BanksAditya Dhal75% (4)
- Swarming Behaviors, Algorithm and Coordination For Unmanned Aerial VehicleDocument10 pagesSwarming Behaviors, Algorithm and Coordination For Unmanned Aerial Vehiclebegziew getnetNo ratings yet
- Integrated Electrical Systems Engineering in Vehicles (ISEIADocument26 pagesIntegrated Electrical Systems Engineering in Vehicles (ISEIAPopina AndreiNo ratings yet
- Scope of Software EngineeringDocument35 pagesScope of Software EngineeringRuksarat KhanankhoawNo ratings yet
- SDLC Stages for Systems DevelopmentDocument59 pagesSDLC Stages for Systems DevelopmentOscar FrizziNo ratings yet
- Analysis of Maruti 800Document148 pagesAnalysis of Maruti 800Anup C67% (3)
- Digital Control Engineering: Analysis and DesignFrom EverandDigital Control Engineering: Analysis and DesignRating: 3 out of 5 stars3/5 (1)
- Oracle Database Performance: Vmware Cloud On AwsDocument14 pagesOracle Database Performance: Vmware Cloud On Awscatelor419No ratings yet
- 947 - Apperntiship Adani Airport - 31-08-2023Document2 pages947 - Apperntiship Adani Airport - 31-08-2023Deep PatelNo ratings yet
- VideosDocument5 pagesVideosElvin Joseph Pualengco MendozaNo ratings yet
- Trudeau Prorogues Parliament: (HDFFC - 00003S /D.TDocument32 pagesTrudeau Prorogues Parliament: (HDFFC - 00003S /D.TBoki VaskeNo ratings yet
- MohammedTauhiduzzaman Resume LinkedInDocument3 pagesMohammedTauhiduzzaman Resume LinkedIntauhid_zaman6776No ratings yet
- Data Structures CompleteDocument255 pagesData Structures Completemovie world50% (2)
- Summer's TowerDocument8 pagesSummer's TowerSum SumNo ratings yet
- III International Congress on Teaching Cases Related to Public and Nonprofit Marketing: Nestlé's CSR in Moga District, IndiaDocument8 pagesIII International Congress on Teaching Cases Related to Public and Nonprofit Marketing: Nestlé's CSR in Moga District, IndiaIshita KotakNo ratings yet
- Banking Fundamentals QuizDocument5 pagesBanking Fundamentals QuizPhương Nghi LêNo ratings yet
- To Revision of DDPMAS-2002: Centre For Military Airworthiness and Certification (CEMILAC)Document11 pagesTo Revision of DDPMAS-2002: Centre For Military Airworthiness and Certification (CEMILAC)Jatinder Singh100% (1)
- Brother Electric Sewing xr9550prwDocument2 pagesBrother Electric Sewing xr9550prwVenkatNo ratings yet
- Local Budget Memorandum No. 75 PDFDocument21 pagesLocal Budget Memorandum No. 75 PDFArnold ImbisanNo ratings yet
- Hydrostatic Test ReportsDocument3 pagesHydrostatic Test ReportsHanuman RaoNo ratings yet
- Action Plan Stratcom PDFDocument5 pagesAction Plan Stratcom PDFDaniel SolisNo ratings yet
- Panasonic Th-42pd50u Chassis Gp8duDocument147 pagesPanasonic Th-42pd50u Chassis Gp8du02ury05No ratings yet
- Drinking Water StandardDocument2 pagesDrinking Water StandardNoorul Mufas Mn100% (1)
- Fluid Mechanics of CH 4 & 5Document44 pagesFluid Mechanics of CH 4 & 5Adugna GosaNo ratings yet
- 3 Zones in 3 Weeks. Devops With Terraform, Ansible and PackerDocument24 pages3 Zones in 3 Weeks. Devops With Terraform, Ansible and Packermano555No ratings yet
- Positive Behavioral Interventions and SupportsDocument32 pagesPositive Behavioral Interventions and SupportsAbhimanyu SinghNo ratings yet
- Alternate Sources OF Finance: FOR RBI Grade B ExamDocument9 pagesAlternate Sources OF Finance: FOR RBI Grade B ExamAadeesh JainNo ratings yet
- Ruskin Bond's Haunting Stories CollectionDocument5 pagesRuskin Bond's Haunting Stories CollectionGopal DeyNo ratings yet
- Vyatta To Control BandwidthDocument2 pagesVyatta To Control BandwidthRonnieNo ratings yet
- BBEK4203 Principles of MacroeconomicsDocument20 pagesBBEK4203 Principles of MacroeconomicskiranaomomNo ratings yet
- Understanding Value at Risk with F&S Investments PortfolioDocument16 pagesUnderstanding Value at Risk with F&S Investments Portfolio7aadkhan100% (2)
- PT Amar Sejahtera General LedgerDocument6 pagesPT Amar Sejahtera General LedgerRiska GintingNo ratings yet
- Course 1 Introduction To SIMS: Student Information Management System (SIMS) Office of The RegistrarDocument28 pagesCourse 1 Introduction To SIMS: Student Information Management System (SIMS) Office of The RegistrarWeijia WangNo ratings yet
- Geo 2230 MJ 02Document8 pagesGeo 2230 MJ 02Jason 402No ratings yet
- 02 Judgment On CompromiseDocument49 pages02 Judgment On CompromiseAlbedo SanNo ratings yet
- The Strategies of Coca-Cola'S Expansion in The Globalization EraDocument12 pagesThe Strategies of Coca-Cola'S Expansion in The Globalization EraFathan MubinaNo ratings yet
- Erasmo WongDocument3 pagesErasmo WongGabriel GutierrezNo ratings yet