You might also like
- CHE501 Heat Transfer ExperimentDocument7 pagesCHE501 Heat Transfer ExperimentEd Ryan RualesNo ratings yet
- Process Control & Tuning of Industrial Control LoopsDocument2 pagesProcess Control & Tuning of Industrial Control LoopsHasen BebbaNo ratings yet
- Model Predictive Control Toolbox™ ReferenceDocument158 pagesModel Predictive Control Toolbox™ ReferenceVictor Colpo NavarreteNo ratings yet
- Advanced Math HandbookDocument88 pagesAdvanced Math HandbookNikka LopezNo ratings yet
- Geankoplis ch01Document6 pagesGeankoplis ch01richardshu3984No ratings yet
- Flocculation and ClarifiersDocument17 pagesFlocculation and ClarifiersOnelNo ratings yet
- Trigonometry Cyclic FunctionsDocument14 pagesTrigonometry Cyclic Functionsulaganathan100% (1)
- Getting Started With Vsphere Command-Line Interfaces: Esxi 5.1 Vcenter Server 5.1Document38 pagesGetting Started With Vsphere Command-Line Interfaces: Esxi 5.1 Vcenter Server 5.1monstratonisNo ratings yet
- Membrane Separation FinalDocument49 pagesMembrane Separation FinalCester Avila DucusinNo ratings yet
- Review On VOC RemovalDocument18 pagesReview On VOC RemovalMuhammad Shehzad Kamal100% (1)
- Analysis of Enzyme Kinetics DataDocument4 pagesAnalysis of Enzyme Kinetics DataEureca Parra100% (2)
- Week 2 - Material Balance Single UnitDocument44 pagesWeek 2 - Material Balance Single UnitAnnisah MardiyyahNo ratings yet
- Resumen CH03 FelderDocument57 pagesResumen CH03 Feldercuberbill1980No ratings yet
- 5 Evaluating A Single ProjectDocument32 pages5 Evaluating A Single ProjectImie CamachoNo ratings yet
- Types of Controllers: Two-Step, Proportional, Derivative & Integral ModesDocument13 pagesTypes of Controllers: Two-Step, Proportional, Derivative & Integral Modescssp115No ratings yet
- VLE Calculations for Distillation DesignDocument4 pagesVLE Calculations for Distillation Designsandeep lal0% (1)
- Minor ProjectDocument47 pagesMinor ProjectSuzzit ShahNo ratings yet
- Distillation ColumnDocument49 pagesDistillation ColumngenergiaNo ratings yet
- Module III Lec2Document7 pagesModule III Lec2Surajit SahaNo ratings yet
- Lecture W12 20232Document29 pagesLecture W12 2023214Adi Zawawi AzmanNo ratings yet
- Chemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 4) : Recycle, Bypass & PurgeDocument25 pagesChemical Process Principles (CLB10904) : Chapter 2 Material Balance: (PART 4) : Recycle, Bypass & PurgeFATMIENo ratings yet
- Mechanics of Fluids: Introduction To Fluid MechanicsDocument46 pagesMechanics of Fluids: Introduction To Fluid Mechanicsearl pannilaNo ratings yet
- Group 1 - Section 01G - Separation Project PDFDocument46 pagesGroup 1 - Section 01G - Separation Project PDFHatta AimanNo ratings yet
- Overview of The Presentation: Peer Enable ProgramDocument6 pagesOverview of The Presentation: Peer Enable Programkaushikei22No ratings yet
- CHEG 5165 - Process Integration and Pinch AnalysisDocument52 pagesCHEG 5165 - Process Integration and Pinch AnalysisSurafelNo ratings yet
- Chemical Engineering Lab ReportDocument36 pagesChemical Engineering Lab ReportAbu BakarNo ratings yet
- IOSR JournalsDocument6 pagesIOSR JournalsInternational Organization of Scientific Research (IOSR)No ratings yet
- MC CabeDocument18 pagesMC CabeSata AjjamNo ratings yet
- SoLucion ControlDocument63 pagesSoLucion Controllurafa1No ratings yet
- Continous Distillation ColumnDocument58 pagesContinous Distillation ColumnGeorge MarkasNo ratings yet
- HST Systems - StudentsDocument106 pagesHST Systems - StudentsjohnsonNo ratings yet
- Formal Report Dylan Novakowski, Ion ExchangeDocument22 pagesFormal Report Dylan Novakowski, Ion ExchangelucassenNo ratings yet
- Minimum IAE Tuning RulesDocument11 pagesMinimum IAE Tuning RulesjgkrishnanNo ratings yet
- Marketing StrategyDocument84 pagesMarketing StrategySantosh Dinesh100% (1)
- Advance Process ControlDocument11 pagesAdvance Process Control김형진No ratings yet
- Chapter 1Document51 pagesChapter 1yaqoobNo ratings yet
- Universiti Tunku Abdul Rahman (Utar) Faculty of Engineering and Green Technology (Fegt)Document26 pagesUniversiti Tunku Abdul Rahman (Utar) Faculty of Engineering and Green Technology (Fegt)khairulNo ratings yet
- Phase Transfer Catalysis PDFDocument53 pagesPhase Transfer Catalysis PDFBranislavaTenjovic100% (1)
- Southern Peel Common 2008Document6 pagesSouthern Peel Common 2008mrjimmyjamNo ratings yet
- Analysis of Temperature Control of CSTR Using S FunctionDocument4 pagesAnalysis of Temperature Control of CSTR Using S FunctionSolecito FuentesNo ratings yet
- Designing a Horizontal Reflux DrumDocument15 pagesDesigning a Horizontal Reflux DrumArfel Marie FuentesNo ratings yet
- Tutorial 5Document3 pagesTutorial 5pleco4meNo ratings yet
- The ECOSSE Control HyperCourseDocument234 pagesThe ECOSSE Control HyperCoursefri_13thNo ratings yet
- Hess LawDocument16 pagesHess LawAriAnggoroNo ratings yet
- Checal 1Document2 pagesChecal 1VaanNo ratings yet
- 1989 Computing and Chemical EngineeringDocument10 pages1989 Computing and Chemical EngineeringFahad TariqNo ratings yet
- Lecture 20 Water Resources Systems Modeling Techniques and AnalysisDocument18 pagesLecture 20 Water Resources Systems Modeling Techniques and AnalysisEndless LoveNo ratings yet
- CHAPTER 4 Energy BalanceDocument35 pagesCHAPTER 4 Energy BalanceZafirahAhmadFauziNo ratings yet
- ECEE 5623 - Real-Time Embedded SystemsDocument13 pagesECEE 5623 - Real-Time Embedded SystemsMehul PatelNo ratings yet
- Class 1 - Need For Process Control & Process TerminologyDocument11 pagesClass 1 - Need For Process Control & Process TerminologyS Meenatchi SundaramNo ratings yet
- Design of Completely Mixed Activated Sludge System: Home Quiz Design ExampleDocument3 pagesDesign of Completely Mixed Activated Sludge System: Home Quiz Design ExampledanndiamondNo ratings yet
- 00 Computer-Aided Computation For Chemical Engineers PDFDocument30 pages00 Computer-Aided Computation For Chemical Engineers PDFAugusto De La Cruz CamayoNo ratings yet
- Multivariable Predictive Control: Applications in IndustryFrom EverandMultivariable Predictive Control: Applications in IndustryNo ratings yet
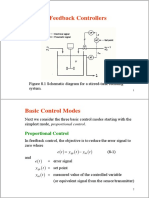
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument18 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniNo ratings yet
- Process Dynamics and Control: Chapter 8 LecturesDocument33 pagesProcess Dynamics and Control: Chapter 8 LecturesMuhaiminul IslamNo ratings yet
- Controller PrincipleDocument24 pagesController PrinciplePortia ShilengeNo ratings yet
- PDC Chapter 8Document49 pagesPDC Chapter 8satya sagarNo ratings yet
- Feedback Controllers ExplainedDocument14 pagesFeedback Controllers Explained李承家No ratings yet
- ControllersDocument32 pagesControllersEric KamauNo ratings yet
- Chapter 8 - Feedback ControllerDocument35 pagesChapter 8 - Feedback ControllerFakhrulShahrilEzanieNo ratings yet
- HomogeneousDocument22 pagesHomogeneousRama ChilpuriNo ratings yet
- Differential EquationDocument66 pagesDifferential Equationsalmaparul_salmazohaNo ratings yet
- Ideal Binary DistillationDocument10 pagesIdeal Binary DistillationRama ChilpuriNo ratings yet
- Chap 1Document39 pagesChap 1Rama ChilpuriNo ratings yet
- Definitions and Terminology: Manipulated Inputs.. Outputs .??Document27 pagesDefinitions and Terminology: Manipulated Inputs.. Outputs .??Rama ChilpuriNo ratings yet
- ElectricalDocument13 pagesElectricalRama ChilpuriNo ratings yet
- 4 ChapterDocument46 pages4 ChapterRama ChilpuriNo ratings yet
- Control of Concentration in CSTRDocument16 pagesControl of Concentration in CSTRRama ChilpuriNo ratings yet
- ElectricalDocument13 pagesElectricalRama ChilpuriNo ratings yet
- Size Reduction EquipmentDocument8 pagesSize Reduction EquipmentEndang Supriyatna100% (1)
- Mass SpectrosDocument20 pagesMass SpectrosAvinashNo ratings yet
- Contoh Analisis Swot Penyelenggaraan DiklatDocument16 pagesContoh Analisis Swot Penyelenggaraan DiklatIdwan Roshid100% (1)
- 5.random VariableDocument28 pages5.random VariableSadman SiamNo ratings yet
- Traditioning: The Game of Painting: Stefan ArteniDocument76 pagesTraditioning: The Game of Painting: Stefan Artenistefan arteniNo ratings yet
- Table 2Document20 pagesTable 2CO OK-Yim Bohol100% (1)
- Decision Tree Explained in 40 CharactersDocument16 pagesDecision Tree Explained in 40 Charactersreshma acharyaNo ratings yet
- Delhi Public School, Bangalore North: 1 - GraphDocument4 pagesDelhi Public School, Bangalore North: 1 - GraphVijay KumarNo ratings yet
- Lecture2 HandDocument12 pagesLecture2 HandNicholas FosterNo ratings yet
- Tuned Liquid Damper (TLD) For Suppressing The Dynamic Response of The StructureDocument16 pagesTuned Liquid Damper (TLD) For Suppressing The Dynamic Response of The StructureMeera BeheraNo ratings yet
- Traffic Planning For Time-Sensitive CommunicationDocument6 pagesTraffic Planning For Time-Sensitive CommunicationIgnatious AntonyNo ratings yet
- Etab Mannual Is 800 2007Document110 pagesEtab Mannual Is 800 2007Ashish JainNo ratings yet
- Maths Class Xii Sample Paper Test 13 For Board Exam 2024Document5 pagesMaths Class Xii Sample Paper Test 13 For Board Exam 2024nayandevpritiNo ratings yet
- CS1204 08dec PDFDocument24 pagesCS1204 08dec PDFthangamkarnaNo ratings yet
- 2.1 Transformations of Quadratic Functions: Essential QuestionDocument8 pages2.1 Transformations of Quadratic Functions: Essential QuestionMankaranNo ratings yet
- DLLec3a NotesDocument12 pagesDLLec3a NotesChintan MandalNo ratings yet
- Understanding Air SpeedsDocument8 pagesUnderstanding Air SpeedsAbhishek SinhaNo ratings yet
- AIEEE/FST 1 Mathematics, Physics & Chemistry Practice TestDocument37 pagesAIEEE/FST 1 Mathematics, Physics & Chemistry Practice TestASHOK PRASADNo ratings yet
- Probability and Statistics For Engineers FinalExam - 2007-1Document8 pagesProbability and Statistics For Engineers FinalExam - 2007-1a.bNo ratings yet
- Bond ValuationDocument15 pagesBond ValuationZahid Usman100% (1)
- Ars. Related To CirclesDocument14 pagesArs. Related To CirclesVino AldrinNo ratings yet
- The Tangent LineDocument27 pagesThe Tangent LineKrisvi Cassandra AlvizNo ratings yet
- Sample Final Exam ADM3301Document15 pagesSample Final Exam ADM3301mark lorenzoNo ratings yet
- 04.sampling Distributions of The EstimatorsDocument32 pages04.sampling Distributions of The EstimatorsRegina VazNo ratings yet
- Guide For Design and Construction - FRP BarsDocument39 pagesGuide For Design and Construction - FRP BarsIon-Alexandru GhioghiuNo ratings yet
- ISC2021 Computer Science Practical PaperDocument5 pagesISC2021 Computer Science Practical PaperAnubhab Dutta GuptaNo ratings yet
- Expected Monetary Value PDFDocument2 pagesExpected Monetary Value PDFPamNo ratings yet
- Microwave Popcorn Factorial ExperimentDocument35 pagesMicrowave Popcorn Factorial ExperimentLuis RamirezNo ratings yet
- S To N Empower 3Document18 pagesS To N Empower 3bayu permanaNo ratings yet
- Adapter Design PatternDocument5 pagesAdapter Design PatternAnonymous BOreSFNo ratings yet
- Magnetic Properties of Materials PDFDocument31 pagesMagnetic Properties of Materials PDFPavan_yoyo100% (1)
- Cont.. Cont..: Ambo University Hachalu Hundessa Institute of TechnologyDocument8 pagesCont.. Cont..: Ambo University Hachalu Hundessa Institute of TechnologyBEKAN FAYERANo ratings yet