You might also like
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Chapter 4 Sampling of Continuous-Time Signals: Biomedical Signal ProcessingDocument19 pagesChapter 4 Sampling of Continuous-Time Signals: Biomedical Signal ProcessingHari2905No ratings yet
- Continuous-Time Signals: David W. Graham EE 327Document18 pagesContinuous-Time Signals: David W. Graham EE 327Waqas Akram GondalNo ratings yet
- Kochar Inderkumar Asst. Professor MPSTME, MumbaiDocument66 pagesKochar Inderkumar Asst. Professor MPSTME, MumbaiKochar InderkumarNo ratings yet
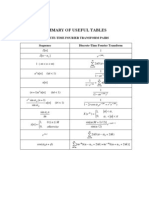
- The Handbook of Formulas and Tables For Signal ProcessingDocument8 pagesThe Handbook of Formulas and Tables For Signal ProcessingPrakash BachaniNo ratings yet
- Introduction To Discrete Time Systems and The Z TransformDocument93 pagesIntroduction To Discrete Time Systems and The Z TransformRaufzha AnandaNo ratings yet
- ECE 414 Tutorial 1: Review: Random Process Fourier Transform OuetasoDocument16 pagesECE 414 Tutorial 1: Review: Random Process Fourier Transform OuetasosaiknaramNo ratings yet
- Ch7 FourierTransform Continuous-Time Signal AnalysisDocument43 pagesCh7 FourierTransform Continuous-Time Signal AnalysisNat RajNo ratings yet
- Stationary Random ProcessesDocument62 pagesStationary Random ProcessesGramoz CubreliNo ratings yet
- Chapter 8 Discrete-Time Signals and Systems 8-1 IntroductionDocument43 pagesChapter 8 Discrete-Time Signals and Systems 8-1 IntroductionAnonymous WkbmWCa8MNo ratings yet
- Signal Processing and DiagnosticsDocument191 pagesSignal Processing and DiagnosticsChu Duc HieuNo ratings yet
- COMM 602: Digital Signal ProcessingDocument32 pagesCOMM 602: Digital Signal ProcessingMohamed YaseenNo ratings yet
- IIR Filter Design TechniquesDocument54 pagesIIR Filter Design TechniquesDora TengNo ratings yet
- Chapter4 ST PDFDocument129 pagesChapter4 ST PDFDinh Phuc BuiNo ratings yet
- Fourier Analysis of Signals and SystemsDocument24 pagesFourier Analysis of Signals and SystemsBabul IslamNo ratings yet
- Response Spectrum Analysis PDFDocument30 pagesResponse Spectrum Analysis PDFSujay SantraNo ratings yet
- Chapter 3 - MatlabDocument59 pagesChapter 3 - MatlabZe SaNo ratings yet
- Digital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisDocument23 pagesDigital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisSyed Raheel AdeelNo ratings yet
- Bilinear Tranformation2Document11 pagesBilinear Tranformation2Ayodele Emmanuel SonugaNo ratings yet
- ECE734 VLSI Arrays for Digital Signal Processing Chapter 4 RetimingDocument24 pagesECE734 VLSI Arrays for Digital Signal Processing Chapter 4 RetimingaravinthcpNo ratings yet
- 2 Basics DSP AV Z Filters NoiseDocument31 pages2 Basics DSP AV Z Filters NoisevignanarajNo ratings yet
- For Simulation (Study The System Output For A Given Input)Document28 pagesFor Simulation (Study The System Output For A Given Input)productforeverNo ratings yet
- FTIR SPECTROSCOPY PRINCIPLESDocument16 pagesFTIR SPECTROSCOPY PRINCIPLESNaween AnandNo ratings yet
- Object XMLDocumentDocument33 pagesObject XMLDocumentBilal MushtaqNo ratings yet
- Chapter 4. Sampling of Continuous-Time SignalsDocument66 pagesChapter 4. Sampling of Continuous-Time Signalsmkmkmkmk2No ratings yet
- Ae Lab ManualDocument52 pagesAe Lab ManualaryakalekattuNo ratings yet
- LAPLACE TRANSFORM CIRCUIT ANALYSISDocument56 pagesLAPLACE TRANSFORM CIRCUIT ANALYSISSando CrisiasaNo ratings yet
- Communication IITN Review1Document28 pagesCommunication IITN Review1Pankaj MeenaNo ratings yet
- Reliability Theory EssentialsDocument83 pagesReliability Theory Essentialsduppal35No ratings yet
- DSP Tut SolutionsDocument83 pagesDSP Tut SolutionsDunfrey AragãoNo ratings yet
- DTSP Easy SoltnDocument15 pagesDTSP Easy SoltnluckyamruNo ratings yet
- Manchester DSP Filter DesignDocument10 pagesManchester DSP Filter DesignsoumikaNo ratings yet
- C4 Isi 2013 PDFDocument32 pagesC4 Isi 2013 PDFAnh Bien NguyenNo ratings yet
- Filters and Tuned Amplifiers DesignDocument79 pagesFilters and Tuned Amplifiers DesignsadyehclenNo ratings yet
- Sampling and ReconstructionDocument40 pagesSampling and ReconstructionHuynh BachNo ratings yet
- Adsp 05 Tfa Mathprelims Ec623 AdspDocument26 pagesAdsp 05 Tfa Mathprelims Ec623 AdsppalashpatankarNo ratings yet
- Sampling ProcessDocument24 pagesSampling ProcessMuhammad Salah ElgaboNo ratings yet
- FilterDocument8 pagesFilterLavanya_123No ratings yet
- AdbspDocument146 pagesAdbspKumar GauravNo ratings yet
- DISCRETE FOURIER TRANSFORMSDocument7 pagesDISCRETE FOURIER TRANSFORMS鲁肃津No ratings yet
- Network Theory-Electrical and Electronics Engineering-The Fourier SeriesDocument16 pagesNetwork Theory-Electrical and Electronics Engineering-The Fourier SeriesMompati Letsweletse100% (1)
- I-1 DSP Review - 2007Document30 pagesI-1 DSP Review - 2007maxxtorr723No ratings yet
- Ece2610 Chap9Document24 pagesEce2610 Chap9Bayar JargalNo ratings yet
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Fourier TransformDocument11 pagesFourier TransformpeekoenholicNo ratings yet
- Frequency Offset Reduction Methods in OFDM: Behrouz Maham Dr. Said Nader-EsfahaniDocument59 pagesFrequency Offset Reduction Methods in OFDM: Behrouz Maham Dr. Said Nader-EsfahaniomjikumarpandeyNo ratings yet
- Lesson 9 - Flyback ConverterDocument31 pagesLesson 9 - Flyback ConverterJhana Kimberly S. AquinoNo ratings yet
- Chapter 8 Discrete (Sampling) System AnalysisDocument38 pagesChapter 8 Discrete (Sampling) System Analysismcoto99No ratings yet
- Dynamic Charactorstics of An InstrumentsDocument30 pagesDynamic Charactorstics of An InstrumentsDhinakaran VeemanNo ratings yet
- Signals and Systems Using Matlab Chapter 7 - Fourier Analysis in Communications and FilteringDocument21 pagesSignals and Systems Using Matlab Chapter 7 - Fourier Analysis in Communications and FilteringDiluNo ratings yet
- Calculus of Variations: An Overview: Dr. Radhakant PadhiDocument40 pagesCalculus of Variations: An Overview: Dr. Radhakant PadhiViviShopgreenNo ratings yet
- Signals and Systems FormulasDocument3 pagesSignals and Systems FormulasKPRBTNo ratings yet
- Fourier Analysis for Image and Video ProcessingDocument17 pagesFourier Analysis for Image and Video ProcessingarrowzyNo ratings yet
- Sampling TheoremDocument34 pagesSampling Theoremgaurav_juneja_4No ratings yet
- Transform Analysis of Linear Time-Invariant Systems: P P P P PDocument16 pagesTransform Analysis of Linear Time-Invariant Systems: P P P P PreneeshczNo ratings yet
- Digital Signal Processing Lecture-2 29 July, 2008, TuesdayDocument51 pagesDigital Signal Processing Lecture-2 29 July, 2008, Tuesdaysamina taneNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Diffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingFrom EverandDiffuse Algorithms for Neural and Neuro-Fuzzy Networks: With Applications in Control Engineering and Signal ProcessingNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- XCD PDFDocument4 pagesXCD PDFVishnu LalNo ratings yet
- Report Guidlines and FormatDocument14 pagesReport Guidlines and FormatluckyamruNo ratings yet
- CAT IV Insulation Testers: Description The Mit400 RangeDocument5 pagesCAT IV Insulation Testers: Description The Mit400 RangeluckyamruNo ratings yet
- XCD PDFDocument4 pagesXCD PDFVishnu LalNo ratings yet
- 22Document6 pages22Gabriel ValenciaNo ratings yet
- Honeywell BW Solo User ManualDocument48 pagesHoneywell BW Solo User ManualluckyamruNo ratings yet
- Reliable, maintenance-free single-gas detector for hazardous environmentsDocument2 pagesReliable, maintenance-free single-gas detector for hazardous environmentsluckyamruNo ratings yet
- CAT IV Insulation Testers: Description The Mit400 RangeDocument6 pagesCAT IV Insulation Testers: Description The Mit400 RangeluckyamruNo ratings yet
- Honeywell BW Max XT II Datasheet PDFDocument2 pagesHoneywell BW Max XT II Datasheet PDFFaldi HarisNo ratings yet
- TECHNICAL MAGAZINE - How To Crack Campus PlacementDocument16 pagesTECHNICAL MAGAZINE - How To Crack Campus PlacementluckyamruNo ratings yet
- Honeywell BW™ Solo: Gas DetectionDocument2 pagesHoneywell BW™ Solo: Gas DetectionluckyamruNo ratings yet
- Printed Circuit Board1Document1 pagePrinted Circuit Board1luckyamruNo ratings yet
- Gas Alert Extreme Data Sheet 555812 enDocument2 pagesGas Alert Extreme Data Sheet 555812 enAlvaro Muñoz BaezaNo ratings yet
- Find square roots mentallyDocument2 pagesFind square roots mentallyluckyamruNo ratings yet
- DTSP Easy SoltnDocument15 pagesDTSP Easy SoltnluckyamruNo ratings yet
- Development of Web-Based SCADA Like Application Using Arduino PlatformDocument5 pagesDevelopment of Web-Based SCADA Like Application Using Arduino PlatformluckyamruNo ratings yet
- 8085 RefDocument2 pages8085 RefBiggRangerNo ratings yet
- Interview Question Answers On C++Document9 pagesInterview Question Answers On C++Dhamo DharanNo ratings yet
- Prepared by Sukruti Kaulgud Assistant Professor (EXTC)Document24 pagesPrepared by Sukruti Kaulgud Assistant Professor (EXTC)luckyamruNo ratings yet
- University Questions (Repaired)Document11 pagesUniversity Questions (Repaired)luckyamruNo ratings yet
- DESIGNexp 1Document44 pagesDESIGNexp 1luckyamruNo ratings yet
- Chapter 7 Filter Design TechniquesDocument152 pagesChapter 7 Filter Design TechniquesluckyamruNo ratings yet
- 15iir v102Document37 pages15iir v102luckyamruNo ratings yet