You might also like
- Chapter 8 Two-Dimensional Problem SolutionDocument51 pagesChapter 8 Two-Dimensional Problem SolutionJoseph Daguio JrNo ratings yet
- FT GT F GT D FT G D: AsteriskDocument22 pagesFT GT F GT D FT G D: Asterisk174A1 HindupriyaNo ratings yet
- Solutions Manual C To Accompany Mechanical Vibration, First Edition by William J. Palm III University of Rhode IslandDocument62 pagesSolutions Manual C To Accompany Mechanical Vibration, First Edition by William J. Palm III University of Rhode Islandkeerthiv7No ratings yet
- FEA Report PDFDocument24 pagesFEA Report PDFDanish JavedNo ratings yet
- Frekans Cevap AnaliziDocument25 pagesFrekans Cevap AnalizineredemaliNo ratings yet
- Types of Damping 1. Viscous DampingDocument6 pagesTypes of Damping 1. Viscous DampingZandro GagoteNo ratings yet
- Bolted Connections: 1.1 Range and Class of The Screw FastenersDocument8 pagesBolted Connections: 1.1 Range and Class of The Screw FastenersksNo ratings yet
- Fea Project ReportDocument58 pagesFea Project ReportAvnish DubeyNo ratings yet
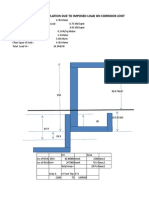
- Deflection Calculation Due To Imposed Load On Corridor JoistDocument14 pagesDeflection Calculation Due To Imposed Load On Corridor JoistranjitNo ratings yet
- MESYS Shaft CalculationDocument28 pagesMESYS Shaft CalculationZoebairNo ratings yet
- Subroutine For Cohesive ElementDocument41 pagesSubroutine For Cohesive ElementBhushanRaj100% (1)
- Wind Analysis ResultsDocument8 pagesWind Analysis ResultsBrahim HammamiNo ratings yet
- Under, Over and Critical DampingDocument6 pagesUnder, Over and Critical Dampingxeron7126No ratings yet
- Design-II, 2016 Bevel Gear Design ProcedureDocument1 pageDesign-II, 2016 Bevel Gear Design ProcedureenggsantuNo ratings yet
- SDOF - Free Vibration - DampedDocument4 pagesSDOF - Free Vibration - DampedJr BongabongNo ratings yet
- Example Problem 9.1 GivenDocument12 pagesExample Problem 9.1 GivengertjaniNo ratings yet
- Assignment 5 - Y-Joint FatigueDocument5 pagesAssignment 5 - Y-Joint Fatiguenallay17050% (1)
- Wind LoadDocument45 pagesWind LoadglaydelleNo ratings yet
- Modal Space - in Our Own Little World: by Pete AvitabileDocument2 pagesModal Space - in Our Own Little World: by Pete AvitabileVignesh SelvarajNo ratings yet
- Vibration Case HistoriesDocument56 pagesVibration Case HistoriesanuprajaNo ratings yet
- Bevel GearDocument17 pagesBevel Gearparesh09No ratings yet
- Bevel ExplanationDocument4 pagesBevel ExplanationVarun VaidyaNo ratings yet
- 2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFDocument12 pages2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFvlad lupasteanuNo ratings yet
- Fatigue Behavior of Materials Under Strain Cycling in Low and Intermediate Life Range PDFDocument58 pagesFatigue Behavior of Materials Under Strain Cycling in Low and Intermediate Life Range PDFLeonardo TerraNo ratings yet
- Real Mode and Complex ModeDocument2 pagesReal Mode and Complex ModeTao Lai100% (2)
- (Engineersdaily Com) IBC2000E11Document21 pages(Engineersdaily Com) IBC2000E11Nazar ShafiqNo ratings yet
- Excel Fatigue AnalysisDocument11 pagesExcel Fatigue AnalysisAli GhNo ratings yet
- Ansys Lug and Pin Stress AnalysesDocument30 pagesAnsys Lug and Pin Stress AnalysesAmm WillulNo ratings yet
- Bolt Load Calculation StepsDocument2 pagesBolt Load Calculation StepsSrikanth ShankarNo ratings yet
- Pressure Vessel Inspection ReportDocument33 pagesPressure Vessel Inspection ReportJinlong SuNo ratings yet
- Quake Ubc 97Document6 pagesQuake Ubc 97samuelcharca8194No ratings yet
- Bond-Slip Model For Detailed Finite-Element AnalysisDocument10 pagesBond-Slip Model For Detailed Finite-Element AnalysisSilver rayleighNo ratings yet
- Damping SystemDocument6 pagesDamping SystemEro DoppleganggerNo ratings yet
- Modal CorrelationDocument53 pagesModal CorrelationDasaka BrahmendraNo ratings yet
- Terminal Report ShredderDocument25 pagesTerminal Report ShredderEnriv YasiladNo ratings yet
- Cycle Counting Methods For FatigueDocument7 pagesCycle Counting Methods For FatigueArdiyan Arezel ArdhyNo ratings yet
- Vibration Suppression and Control: William J. Palm IIIDocument47 pagesVibration Suppression and Control: William J. Palm IIIMaJo0oDe100% (1)
- Is 14812 2005Document12 pagesIs 14812 2005JayDeep KhajureNo ratings yet
- R D Vib Ti Random Vibration: ANSYS Mechanical ANSYS Mechanical DynamicsDocument22 pagesR D Vib Ti Random Vibration: ANSYS Mechanical ANSYS Mechanical DynamicsRoss WaringNo ratings yet
- AS4041 ASME B31 - 3 Pipe Wall ThicknessDocument1 pageAS4041 ASME B31 - 3 Pipe Wall ThicknesselleNo ratings yet
- Lug Analysis MechaniCalcDocument29 pagesLug Analysis MechaniCalcOSCARDELTANo ratings yet
- Ex MathcadDocument8 pagesEx MathcadRija HossainNo ratings yet
- Response Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Document15 pagesResponse Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Anonymous UibQYvc6No ratings yet
- ME421-Single Degree of Freedom System (Damped) PDFDocument13 pagesME421-Single Degree of Freedom System (Damped) PDFAli Haider RizviNo ratings yet
- EQL and DesignDocument6 pagesEQL and Designsabareesan09No ratings yet
- Isolator Selection GuideDocument30 pagesIsolator Selection GuideRaasik Jain100% (1)
- Vibration Sample ProblemDocument24 pagesVibration Sample ProblemvillanuevamarkdNo ratings yet
- 11 Problems - 11 Solutions: Case Histories of 11 Machinery Vibration Problems - Part 1Document7 pages11 Problems - 11 Solutions: Case Histories of 11 Machinery Vibration Problems - Part 1Ahmed El-ShafeiNo ratings yet
- BMD SFDDocument3 pagesBMD SFDShrinath ShetNo ratings yet
- This Data Was Generated Using The Function Definition: Sin (2 Pi Freq Time) Here, Time Is Defined As Integer Multiples of The Sampling FrequencyDocument44 pagesThis Data Was Generated Using The Function Definition: Sin (2 Pi Freq Time) Here, Time Is Defined As Integer Multiples of The Sampling FrequencyRaturi DeepankarNo ratings yet
- Mechanics of Solids Week 5 LecturesDocument10 pagesMechanics of Solids Week 5 LecturesFlynn GouldNo ratings yet
- Plane Stress Vs StrainDocument53 pagesPlane Stress Vs StrainWondwosen A. LakewNo ratings yet
- FEM FullDocument423 pagesFEM FullHarish LambadiNo ratings yet
- Torsion of BarsDocument33 pagesTorsion of Barskrishna kumar100% (1)
- Chapter 8 Two-Dimensional Problem SolutionDocument51 pagesChapter 8 Two-Dimensional Problem Solutiongpskumar22No ratings yet
- Chapter 8 Two-Dimensional Problem SolutionDocument51 pagesChapter 8 Two-Dimensional Problem SolutionUNsha bee kom100% (1)
- Plane Strain and Plane StressDocument35 pagesPlane Strain and Plane StressRonald Cario SeguinNo ratings yet
- Chapter 6Document4 pagesChapter 6newrome76No ratings yet
- 3 Del As Ti CityDocument10 pages3 Del As Ti CityMohammad SalimuddinNo ratings yet
- OJT-DTR Format SampleDocument8 pagesOJT-DTR Format SampleHk Lorilla Quong0% (1)
- PG 10-11 HRD Application For Student Traineeship ProgramDocument2 pagesPG 10-11 HRD Application For Student Traineeship ProgramHk Lorilla QuongNo ratings yet
- Safety First (Chapter15)Document19 pagesSafety First (Chapter15)Hk Lorilla QuongNo ratings yet
- Sample Problems in Mechanics of MaterialsDocument5 pagesSample Problems in Mechanics of MaterialsHk Lorilla QuongNo ratings yet
- Chapter 7 Two-Dimensional FormulationDocument18 pagesChapter 7 Two-Dimensional FormulationHk Lorilla QuongNo ratings yet