You might also like
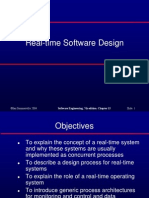
- Real-Time Software Design: ©ian Sommerville 2004Document53 pagesReal-Time Software Design: ©ian Sommerville 2004jnax101No ratings yet
- Real-Time Systems: - For Example, A Temperature Sensor May Be Polled 10 Times Per SecondDocument3 pagesReal-Time Systems: - For Example, A Temperature Sensor May Be Polled 10 Times Per SecondarunbelveNo ratings yet
- Software PrototypingDocument39 pagesSoftware Prototypingtine223No ratings yet
- Chapter 7 - Embedded Software (Lecture 10)Document39 pagesChapter 7 - Embedded Software (Lecture 10)abreham ashebirNo ratings yet
- CH 8Document43 pagesCH 8api-3798954No ratings yet
- Distributed Systems ArchitecturesDocument48 pagesDistributed Systems Architecturesapi-25884963No ratings yet
- Characteristics of Real-Time SystemsDocument40 pagesCharacteristics of Real-Time SystemsPrathamesh GujarNo ratings yet
- 2 MarksDocument5 pages2 MarksPriya DharshiniNo ratings yet
- 23 DiagnosticsDocument34 pages23 DiagnosticsfortroniNo ratings yet
- Software Prototyping: ©ian Sommerville 2000 Software Engineering, 6th Edition. Chapter 8 Slide 1Document39 pagesSoftware Prototyping: ©ian Sommerville 2000 Software Engineering, 6th Edition. Chapter 8 Slide 1Prateek GuptaNo ratings yet
- Fault Simulator of Car Engine: Pratik Goyal, Sumedha Fegade, Damini Dabhilkar, Dr. Sharmila PetkarDocument4 pagesFault Simulator of Car Engine: Pratik Goyal, Sumedha Fegade, Damini Dabhilkar, Dr. Sharmila PetkarPratik GoyalNo ratings yet
- RTS Lec5nDocument17 pagesRTS Lec5nOmar Farooq MalikNo ratings yet
- D2A1-2-2-DV Reusable UVM REG BackdoorDocument11 pagesD2A1-2-2-DV Reusable UVM REG BackdoorRaj Shekhar ReddyNo ratings yet
- 2020 CoE2DX4 W7Document43 pages2020 CoE2DX4 W7Shahram ShiraniNo ratings yet
- Chapter 1Document46 pagesChapter 1kiramelaku1No ratings yet
- Stepper Motor Positioning Control by IR RemoteDocument80 pagesStepper Motor Positioning Control by IR RemotesathishNo ratings yet
- Software Processes: ©ian Sommerville 2000 Software Engineering, 6th Edition. Chapter 3 Slide 1Document49 pagesSoftware Processes: ©ian Sommerville 2000 Software Engineering, 6th Edition. Chapter 3 Slide 1suryadiNo ratings yet
- RTS Slids Lec5Document17 pagesRTS Slids Lec5stephen562001No ratings yet
- This Content Downloaded From 201.131.90.36 On Mon, 27 Jul 2020 06:44:25 UTCDocument8 pagesThis Content Downloaded From 201.131.90.36 On Mon, 27 Jul 2020 06:44:25 UTCDarioMorenoNo ratings yet
- ECEG4202-Embedded Systems: Welcome To The CourseDocument154 pagesECEG4202-Embedded Systems: Welcome To The Coursesadam endrisNo ratings yet
- A Controller Design For Servo Control System Using Different TechniquesDocument8 pagesA Controller Design For Servo Control System Using Different TechniquesKOKONo ratings yet
- Software Prototyping: Rapid Software Development To Validate Requirements ObjectivesDocument28 pagesSoftware Prototyping: Rapid Software Development To Validate Requirements Objectivesnehaaswal1No ratings yet
- INTCN1503-Unitrol 5000 Operation and Maintenance For Generator Excitation Control - Rev-ADocument2 pagesINTCN1503-Unitrol 5000 Operation and Maintenance For Generator Excitation Control - Rev-AjayapalNo ratings yet
- INTCN1503-Unitrol 5000 Operation and Maintenance For Generator Excitation Control - Rev-ADocument2 pagesINTCN1503-Unitrol 5000 Operation and Maintenance For Generator Excitation Control - Rev-ASandipan MukherjeeNo ratings yet
- Creating Cycles Production SeproDocument9 pagesCreating Cycles Production SeproPasarica AlexandruNo ratings yet
- Pidcontrollers 150912140326 Lva1 App6892 PDFDocument18 pagesPidcontrollers 150912140326 Lva1 App6892 PDFKalyan TejaNo ratings yet
- Feedback Systems in HVAC: ASHRAE Distinguished Lecture SeriesDocument17 pagesFeedback Systems in HVAC: ASHRAE Distinguished Lecture SeriesNikhil TiwariNo ratings yet
- Calibration Motion Control System-Part2 PDFDocument6 pagesCalibration Motion Control System-Part2 PDFnurhazwaniNo ratings yet
- PID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015Document18 pagesPID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015aditee saxenaaNo ratings yet
- Chapter 2-Part 12 1Document38 pagesChapter 2-Part 12 1s.kouadriNo ratings yet
- Industrial EngineeringDocument8 pagesIndustrial EngineeringSohaib SajidNo ratings yet
- Marine 1.1.3.11 Lab - Draw A Process DiagramDocument3 pagesMarine 1.1.3.11 Lab - Draw A Process DiagramJa'Mia MarineNo ratings yet
- Main ProjectDocument13 pagesMain ProjectSam HatrickNo ratings yet
- 3 Lecture - Simulation Studies - An Overview (Part II)Document8 pages3 Lecture - Simulation Studies - An Overview (Part II)nicusorandriesNo ratings yet
- Design For Testability (DFT) : Vlsi Ii: Design of Very Large Scale Integration CircuitsDocument22 pagesDesign For Testability (DFT) : Vlsi Ii: Design of Very Large Scale Integration CircuitsSiam HasanNo ratings yet
- CH 26Document58 pagesCH 26Joybrata PalNo ratings yet
- 4 Lecture 4 PMDocument50 pages4 Lecture 4 PMAdham DiaaNo ratings yet
- Ch22 and Ch23 - TestingDocument30 pagesCh22 and Ch23 - TestingImane AaNo ratings yet
- Software Engineering For Real-Time Systems.: W Presented by Andrew Dyer-Smith and Jamie McclellandDocument12 pagesSoftware Engineering For Real-Time Systems.: W Presented by Andrew Dyer-Smith and Jamie McclellandGunasundari SenguttuvanNo ratings yet
- DAVE Quick Start PresentationTutorial v2-1 PDFDocument39 pagesDAVE Quick Start PresentationTutorial v2-1 PDFAndrei LavricNo ratings yet
- Gce Electronics Book Chapter 6Document24 pagesGce Electronics Book Chapter 6m.b.homsyNo ratings yet
- Calibration Motion Control System-Part2Document7 pagesCalibration Motion Control System-Part2NURUL FATIN HAMIZAH AH SIAK MOHD HELMINo ratings yet
- Design of Fault Injection Technique For Digital HDL ModelsDocument5 pagesDesign of Fault Injection Technique For Digital HDL ModelsAKBNo ratings yet
- 1 Rapid Control Prototyping ............................................................................. 1Document8 pages1 Rapid Control Prototyping ............................................................................. 1alsamixersNo ratings yet
- Embedded & Real Time System.: Lecture By:p. Jenifer Darling RositaDocument19 pagesEmbedded & Real Time System.: Lecture By:p. Jenifer Darling RositajeniferNo ratings yet
- IntreuptsDocument7 pagesIntreuptsW Game CreationNo ratings yet
- Rapid Software Development To Validate RequirementsDocument11 pagesRapid Software Development To Validate RequirementsKaustubh KumarNo ratings yet
- Event Based Simulation Put Your Designs in MotionDocument9 pagesEvent Based Simulation Put Your Designs in MotionJorge VargasNo ratings yet
- PID Control: Introduction ToDocument6 pagesPID Control: Introduction ToHi fiveNo ratings yet
- PLC ProgrammingDocument6 pagesPLC ProgrammingEngr Moinul AhsanNo ratings yet
- System Models: ©ian Sommerville 2004Document43 pagesSystem Models: ©ian Sommerville 2004Hassan AhmedNo ratings yet
- Unit I 1626081091962Document123 pagesUnit I 1626081091962Akash MNo ratings yet
- N410 Documentation 2Document63 pagesN410 Documentation 2brunettemasheleNo ratings yet
- Implementation: 6.1 Module DescriptionDocument9 pagesImplementation: 6.1 Module DescriptionGopi KrishnaNo ratings yet
- LabManual (3381)Document179 pagesLabManual (3381)schaefer1015719No ratings yet
- 56 - A Learning Model For 8051 Microcontroller Case Study On Closed Loop DC Motor Speed Control PDFDocument7 pages56 - A Learning Model For 8051 Microcontroller Case Study On Closed Loop DC Motor Speed Control PDFhecirlene vieiraNo ratings yet
- To Perform SIL and PIL Testing On Fast D PDFDocument4 pagesTo Perform SIL and PIL Testing On Fast D PDFgil lerNo ratings yet
- Functional and Non Function SpecificationDocument54 pagesFunctional and Non Function SpecificationSyed Muhammad QasimNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Software EvolutionDocument43 pagesSoftware Evolutionapi-25884963No ratings yet
- Operating SystemsDocument68 pagesOperating Systemsapi-25884963No ratings yet
- Critical Systems ValidationDocument41 pagesCritical Systems Validationapi-25884963No ratings yet
- Software Testing: ©ian Sommerville 2004Document37 pagesSoftware Testing: ©ian Sommerville 2004api-25884963No ratings yet
- Critical Systems DevelopmentDocument42 pagesCritical Systems Developmentapi-25884963No ratings yet
- Verification and ValidationDocument42 pagesVerification and Validationapi-25884963No ratings yet
- Architectural DesignDocument43 pagesArchitectural Designapi-25884963No ratings yet
- Rapid Software DevelopmentDocument41 pagesRapid Software Developmentapi-25884963No ratings yet
- Component-Based Software EngineeringDocument36 pagesComponent-Based Software Engineeringapi-25884963No ratings yet
- Distributed Systems ArchitecturesDocument48 pagesDistributed Systems Architecturesapi-25884963No ratings yet
- Software Reuse: ©ian Sommerville 2004 Slide 1Document50 pagesSoftware Reuse: ©ian Sommerville 2004 Slide 1api-25884963No ratings yet
- Socio-Technical Systems: ©ian Sommerville 2004 Software Engineering, 7th Edition. Chapter 2 Slide 1Document49 pagesSocio-Technical Systems: ©ian Sommerville 2004 Software Engineering, 7th Edition. Chapter 2 Slide 1api-25884963No ratings yet
- ©ian Sommerville 2004Document41 pages©ian Sommerville 2004api-25884963No ratings yet
- Requirements Engineering ProcessesDocument42 pagesRequirements Engineering Processesapi-25884963100% (2)
- Critical Systems: ©ian Sommerville 2004 Software Engineering, 7th Edition. Chapter 3 Slide 1Document45 pagesCritical Systems: ©ian Sommerville 2004 Software Engineering, 7th Edition. Chapter 3 Slide 1api-25884963No ratings yet
- SWE 214 (071) Introduction To UML Slide 1Document22 pagesSWE 214 (071) Introduction To UML Slide 1api-25884963No ratings yet
- NullDocument45 pagesNullapi-25884963No ratings yet
- CH 4 SWProcessesDocument50 pagesCH 4 SWProcessesapi-3748142No ratings yet
- CH 5Document39 pagesCH 5api-3798954No ratings yet
- The Internet Worm: - Compromising The Availability and Reliability of Systems Through Security FailureDocument14 pagesThe Internet Worm: - Compromising The Availability and Reliability of Systems Through Security Failureapi-25884963No ratings yet
- An Introduction To Software Engineering: ©ian Sommerville 2004 Software Engineering, 7th Edition. Chapter 1 Slide 1Document31 pagesAn Introduction To Software Engineering: ©ian Sommerville 2004 Software Engineering, 7th Edition. Chapter 1 Slide 1api-3748142No ratings yet
- The Ariane 5 Launcher FailureDocument2 pagesThe Ariane 5 Launcher Failureapi-25884963No ratings yet
- Small Engine EFI Tuning GuideDocument189 pagesSmall Engine EFI Tuning GuideFabio GuedesNo ratings yet
- Ha 17555Document7 pagesHa 17555Brzata PticaNo ratings yet
- Close: Lascon Storage BackupsDocument4 pagesClose: Lascon Storage BackupsAtthulaiNo ratings yet
- Ieee802 Hetnet TutorialDocument75 pagesIeee802 Hetnet TutorialPayal PriyaNo ratings yet
- BASIC: Beginner's All-Purpose Symbolic Instruction Code: What Does BASIC Look Like A Larger Program: Animal - BASDocument6 pagesBASIC: Beginner's All-Purpose Symbolic Instruction Code: What Does BASIC Look Like A Larger Program: Animal - BASAtanu DasNo ratings yet
- Compact Tetra System PlannerDocument135 pagesCompact Tetra System PlannerHakunaMatata_76No ratings yet
- Linux Filesystem Hierarchy: The Linux Documentation ProjectDocument29 pagesLinux Filesystem Hierarchy: The Linux Documentation ProjectthewhiteeyeNo ratings yet
- 3HAC024480-011 - Rev00 Robot 12Document131 pages3HAC024480-011 - Rev00 Robot 12Alejandro PuenteNo ratings yet
- Zynq 7000 Product Selection GuideDocument11 pagesZynq 7000 Product Selection GuideheelancdNo ratings yet
- SL 52615Document68 pagesSL 52615Francis Jay ManaloNo ratings yet
- E18 Series ZigBee3.0 UserManua EN v1.2Document20 pagesE18 Series ZigBee3.0 UserManua EN v1.2Luthfi HanifNo ratings yet
- FFmpeg Batch User Guide enDocument34 pagesFFmpeg Batch User Guide enJabahhNo ratings yet
- Vaidehi - Patil Computer BDocument1 pageVaidehi - Patil Computer BSamiksha ChavanNo ratings yet
- Https WWW - Solaredge.com Sites Default Files Sunspec-Implementation-Technical-NoteDocument29 pagesHttps WWW - Solaredge.com Sites Default Files Sunspec-Implementation-Technical-NotevimallambaNo ratings yet
- EEC 214 Lecture 1Document34 pagesEEC 214 Lecture 1yhya TarekNo ratings yet
- System Call PDFDocument4 pagesSystem Call PDFGolam Kibria 203-15-14522No ratings yet
- Foshan Blue Rocket Elec 2N2222A - C358533Document6 pagesFoshan Blue Rocket Elec 2N2222A - C358533mrahNo ratings yet
- 510-0020-001 Cycle 5-IP Upgrade Board 1994Document48 pages510-0020-001 Cycle 5-IP Upgrade Board 1994Doey GrunchNo ratings yet
- Automatic Stabilization of Zigbee Network: Guanghui Pan Jia HeDocument4 pagesAutomatic Stabilization of Zigbee Network: Guanghui Pan Jia HeEdgar A.BNo ratings yet
- Multiprocessor Systems:: Advanced Operating SystemDocument60 pagesMultiprocessor Systems:: Advanced Operating SystemshaiqNo ratings yet
- HYNIX DDR5 Module - New Part Number Decoder - r.2.1 - Sep 2021Document5 pagesHYNIX DDR5 Module - New Part Number Decoder - r.2.1 - Sep 2021Aleksandr Nevedrov100% (1)
- CSC Final Exam Study SheetDocument2 pagesCSC Final Exam Study Sheetthess22No ratings yet
- Eca 2 Three PhaseDocument29 pagesEca 2 Three PhaseHassan AamerNo ratings yet
- ThinkPad L480 Spec PDFDocument1 pageThinkPad L480 Spec PDFGema RamdaniNo ratings yet
- Moldeo 48Document1 pageMoldeo 48JMNo ratings yet
- Speed Negotiation Improvement For Hard Disk Drive Serial ATA PDFDocument99 pagesSpeed Negotiation Improvement For Hard Disk Drive Serial ATA PDFNguyễn HạnhNo ratings yet
- Studio 350 Power Amplifier ModuleDocument10 pagesStudio 350 Power Amplifier ModuleCharlie SoutoNo ratings yet
- From DFT To Z-TransformDocument10 pagesFrom DFT To Z-TransformVivien VilladelreyNo ratings yet
- LM2917 ExamplesDocument1 pageLM2917 ExamplesSergio RamosNo ratings yet
- Embedded Linux SlidesDocument537 pagesEmbedded Linux SlidesMohendra PatiNo ratings yet