You might also like
- Aprende Ingles Rápidamente Con Estos TipsDocument9 pagesAprende Ingles Rápidamente Con Estos TipsLuis SamaniegoNo ratings yet
- Manual Programacion FanucDocument186 pagesManual Programacion Fanuc1970partituras100% (5)
- Reporte Realidad AumentadaDocument8 pagesReporte Realidad AumentadaLuis SamaniegoNo ratings yet
- Informacion!!Document2 pagesInformacion!!Pool SaidNo ratings yet
- Respuestas Pruebas PsicometricasDocument3 pagesRespuestas Pruebas PsicometricasJaime Loor0% (1)
- Cambio y TransicionDocument8 pagesCambio y TransicionLuis SamaniegoNo ratings yet
- Diagrama GanttDocument2 pagesDiagrama GanttLuis SamaniegoNo ratings yet
- NitinolDocument1 pageNitinolLuis SamaniegoNo ratings yet
- Comp Araci OnDocument2 pagesComp Araci OnLuis SamaniegoNo ratings yet
- Cambio y TransicionDocument8 pagesCambio y TransicionLuis SamaniegoNo ratings yet
- Posiciones MecanismosDocument1 pagePosiciones MecanismosLuis SamaniegoNo ratings yet
- MAR1Document3 pagesMAR1Luis SamaniegoNo ratings yet
- Proyecto Final Realidad AumentadaDocument2 pagesProyecto Final Realidad AumentadaLuis SamaniegoNo ratings yet
- PBL#1Document4 pagesPBL#1Luis SamaniegoNo ratings yet
- Página 1 Mecánica de Materiales M-2006 Ago-Dic 2013Document5 pagesPágina 1 Mecánica de Materiales M-2006 Ago-Dic 2013Luis SamaniegoNo ratings yet
- Mi CodigoDocument1 pageMi CodigoLuis SamaniegoNo ratings yet
- Tesis Ley de MaquilasDocument210 pagesTesis Ley de Maquilasrpazos79No ratings yet
- 7 retos educación Colombia 2006-2019Document10 pages7 retos educación Colombia 2006-2019Jorge Mario UsugaNo ratings yet
- Trabajo Final BCP 1Document52 pagesTrabajo Final BCP 1Alina Perales45% (11)
- Emolumentos para Socios y AccionistasDocument2 pagesEmolumentos para Socios y AccionistasDerek MacsNo ratings yet
- Matemáticas FinancierasDocument37 pagesMatemáticas FinancierasGerson Morales RodriguezNo ratings yet
- OC CEPyS Semana 2 VB 2021Document14 pagesOC CEPyS Semana 2 VB 2021Alex FraustoNo ratings yet
- Contrato Prosalud 2023Document25 pagesContrato Prosalud 2023elianalandeogomezNo ratings yet
- Postweld Heat Treatment (PWHT)Document2 pagesPostweld Heat Treatment (PWHT)Freddy Lagua PerezNo ratings yet
- P&idDocument19 pagesP&idIsamar Salas MirandaNo ratings yet
- Taller Administración DeportivaDocument1 pageTaller Administración Deportivajavier javier100% (2)
- Compendio FlorezDocument294 pagesCompendio FlorezERNESTONo ratings yet
- Logística: Conceptos básicos, funciones y objetivosDocument66 pagesLogística: Conceptos básicos, funciones y objetivosShirley Maguiña anduhagaNo ratings yet
- Discriminación de Precios - ResumenDocument10 pagesDiscriminación de Precios - ResumenIomira Torre CandiaNo ratings yet
- Master Bim Dynamo - MDYDocument6 pagesMaster Bim Dynamo - MDYJuandaCabreraCoboNo ratings yet
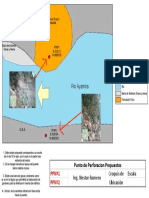
- Formacion Pozo (P-poz) Roca fracturada Rio AyamiraDocument1 pageFormacion Pozo (P-poz) Roca fracturada Rio AyamiraJunior Andia CarbajalNo ratings yet
- Actividad 2 IndividualDocument9 pagesActividad 2 IndividualLuzDaryGómezNo ratings yet
- Guia de Aprendizaje Unidad 2 PhotoshopDocument7 pagesGuia de Aprendizaje Unidad 2 PhotoshopNicolas Gonzalez100% (1)
- PC1 Estructuras determinar fuerzas cables candelabro vigasDocument2 pagesPC1 Estructuras determinar fuerzas cables candelabro vigasJorge Valverde OlivaNo ratings yet
- Check List Verificacion 5S TallerDocument9 pagesCheck List Verificacion 5S TallerEdinho1980No ratings yet
- Presupuesto administrativo: introducción, concepto e importanciaDocument10 pagesPresupuesto administrativo: introducción, concepto e importanciaCARLOS RAFAEL PINEDA LOARCANo ratings yet
- Brochure - Gestion de FlotasDocument5 pagesBrochure - Gestion de FlotasEduardo Estewar Moran PittmanNo ratings yet
- Memoria Descriptiva (Caminos I)Document20 pagesMemoria Descriptiva (Caminos I)Andy Greey Mera VásquezNo ratings yet
- Resumen Ejecutivo Canal 13 AgostoDocument21 pagesResumen Ejecutivo Canal 13 AgostoNicol AredoNo ratings yet
- Bolsa de TrabajoDocument1 pageBolsa de TrabajoArturo Cortes MirandaNo ratings yet
- Ensayo Del Balance de Situacion (Balance General)Document4 pagesEnsayo Del Balance de Situacion (Balance General)LUIS ALBERTO APARICIO SALCEDONo ratings yet
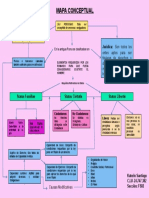
- Mapa ConceptualDocument1 pageMapa ConceptualLorena GalatiNo ratings yet
- Tesis Silla de Ruedas 02-12-2014 FinalizadaDocument202 pagesTesis Silla de Ruedas 02-12-2014 FinalizadaSilva Junior80% (5)
- Foro (2) Mercadotecnia InternacionalDocument4 pagesForo (2) Mercadotecnia InternacionalLuciernaga Fu RiosaNo ratings yet
- Constitución SAC Yellow GroupDocument16 pagesConstitución SAC Yellow GroupGloria RodríguezNo ratings yet
- Curriculum VitaeDocument3 pagesCurriculum VitaeFrancisco Lopéz100% (1)