You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- CM Spend ConsultingCore 29v2Document352 pagesCM Spend ConsultingCore 29v2Sandeep KumarNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- USER MANUAL iFMSDocument85 pagesUSER MANUAL iFMSVenu KumarNo ratings yet
- Workshop Solution For Bulk ProcessingDocument20 pagesWorkshop Solution For Bulk Processingmuruganandhan100% (2)
- ISO 9000:2005 - QMS - Fundamentals and VocabularyDocument34 pagesISO 9000:2005 - QMS - Fundamentals and VocabularySafiullah Azeem Ahamed67% (3)
- CAL-00-E-0004 Rev-1 ELECTRICAL CABLE SIZINGDocument5 pagesCAL-00-E-0004 Rev-1 ELECTRICAL CABLE SIZINGtceterexNo ratings yet
- British Signals Intelligence in The Trenches - 1915-1918 - Part1Document24 pagesBritish Signals Intelligence in The Trenches - 1915-1918 - Part1maruka33No ratings yet
- Enrolling An Android Device in InTuneDocument15 pagesEnrolling An Android Device in InTuneRai DuNo ratings yet
- TEC - OPS - Supra MT - 750-1250 - 62-61921-20 - Rev - ENGDocument501 pagesTEC - OPS - Supra MT - 750-1250 - 62-61921-20 - Rev - ENGJennyJudithRuizSanchez100% (1)
- Datascience One WordDocument30 pagesDatascience One WordShradha GaikwadNo ratings yet
- Fetch Statementand NoticesDocument4 pagesFetch Statementand NoticesElizabethNo ratings yet
- Paper 9007Document11 pagesPaper 9007IJARSCT JournalNo ratings yet
- Intern Report-3Document77 pagesIntern Report-3manishNo ratings yet
- User Guide: Small in Size, With Grand FeaturesDocument13 pagesUser Guide: Small in Size, With Grand Featuresjhfbty100% (1)
- William Stallings Computer Organization and Architecture 7 Edition Instruction Sets: Addressing Modes and FormatsDocument45 pagesWilliam Stallings Computer Organization and Architecture 7 Edition Instruction Sets: Addressing Modes and FormatsAlaa YounisNo ratings yet
- Itime FAQDocument20 pagesItime FAQadadaed adNo ratings yet
- 06-STM32 Security WS STM32 Trust IntroductionDocument27 pages06-STM32 Security WS STM32 Trust IntroductionsolokingNo ratings yet
- Node - Js SecurityDocument17 pagesNode - Js SecurityDejan MiticNo ratings yet
- MT131 Tutorial - 2 Sets Functions Sequences and Summation - 2023-2024Document63 pagesMT131 Tutorial - 2 Sets Functions Sequences and Summation - 2023-2024johnnader1254No ratings yet
- Coding Form Data SiswaDocument5 pagesCoding Form Data SiswaVicky SplitfireNo ratings yet
- Samsung Introduction of New 40T v3Document15 pagesSamsung Introduction of New 40T v3costel cracanaNo ratings yet
- TC600EDocument2 pagesTC600ERadekNo ratings yet
- Easyio FG Series, Fs Series and FW Series Peer To Peer User GuideDocument12 pagesEasyio FG Series, Fs Series and FW Series Peer To Peer User Guidenguyendinhphuc22008No ratings yet
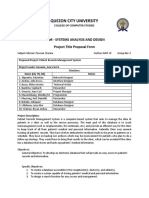
- Group 1 Revised Proposal. Patient Records Management SystemDocument2 pagesGroup 1 Revised Proposal. Patient Records Management SystemAlioding M. MacarimbangNo ratings yet
- Corporate ProfileDocument87 pagesCorporate ProfileSachin YadavNo ratings yet
- Isopropil MiristatDocument1 pageIsopropil MiristatnofaNo ratings yet
- Augmented Reality in Medical Education Students Experiences and Learning OutcomesDocument10 pagesAugmented Reality in Medical Education Students Experiences and Learning Outcomesapi-688059491No ratings yet
- Learning and Innovation Officer JD - May 2022Document5 pagesLearning and Innovation Officer JD - May 2022Larissa DiasNo ratings yet
- The Development of The Praetor's Edict - WatsonDocument16 pagesThe Development of The Praetor's Edict - WatsonErenNo ratings yet
- Robotics Unit4 SlidesDocument72 pagesRobotics Unit4 SlidesJanarthanan BalakrishnasamyNo ratings yet
- JOUR280 Demo 8Document6 pagesJOUR280 Demo 8madridjago aasNo ratings yet