You might also like
- Big M MethodDocument12 pagesBig M MethodAbhishek SinghNo ratings yet
- Simplex MethodDocument16 pagesSimplex MethodShantanu Dutta100% (1)
- Test Bank for Precalculus: Functions & GraphsFrom EverandTest Bank for Precalculus: Functions & GraphsRating: 5 out of 5 stars5/5 (1)
- E1039207009 21119 1218595455594Document23 pagesE1039207009 21119 1218595455594Ayush TiwariNo ratings yet
- Dual Simplex Method For Solving The PrimalDocument49 pagesDual Simplex Method For Solving The PrimalMyth SoumithNo ratings yet
- L09 - Some Exceptional Cases in LPPs PDFDocument30 pagesL09 - Some Exceptional Cases in LPPs PDFNirmitNo ratings yet
- 04 Simplex 2Document36 pages04 Simplex 2Potnuru VinayNo ratings yet
- 08 Simplex 3 CDocument31 pages08 Simplex 3 CPotnuru VinayNo ratings yet
- Additional Simplex Algorithms: Dual Simplex Method and Generalized Simplex MethodDocument44 pagesAdditional Simplex Algorithms: Dual Simplex Method and Generalized Simplex MethodAnimesh ChoudharyNo ratings yet
- Simplex MethodDocument61 pagesSimplex MethodvasudhasinghNo ratings yet
- m140 Chapter3 Sec3.4 F18completedDocument6 pagesm140 Chapter3 Sec3.4 F18completedHasmitthaNo ratings yet
- Addition of A New ConstraintDocument22 pagesAddition of A New ConstraintPotnuru VinayNo ratings yet
- Assinment 1 Question 2Document4 pagesAssinment 1 Question 2mohammed aliNo ratings yet
- In This Presentation We Illustrate The Ideas Developed in The Previous Presentation With Two More ProblemsDocument21 pagesIn This Presentation We Illustrate The Ideas Developed in The Previous Presentation With Two More ProblemsAngad SehdevNo ratings yet
- Simplex Method ComputationDocument7 pagesSimplex Method ComputationGoody keyzNo ratings yet
- Electrical Engineering Engineering Operations Research Linear Programming Problems NotesDocument46 pagesElectrical Engineering Engineering Operations Research Linear Programming Problems NotesAntónio FreitasNo ratings yet
- Big M MethodDocument28 pagesBig M Methodأزرين رحيم0% (1)
- The Simplex Algorithm: Putting Linear Programs Into Standard Form Introduction To Simplex AlgorithmDocument25 pagesThe Simplex Algorithm: Putting Linear Programs Into Standard Form Introduction To Simplex AlgorithmmritroyNo ratings yet
- Class Note Simplex MethodDocument6 pagesClass Note Simplex MethodBijay NagNo ratings yet
- Special Cases in Linear ProgrammingDocument21 pagesSpecial Cases in Linear ProgrammingDanna Godez100% (2)
- Simplex Method DiscussionDocument6 pagesSimplex Method DiscussionDarkknightNo ratings yet
- Operations Research - CH - IiiDocument47 pagesOperations Research - CH - Iiifentahunamanuel2No ratings yet
- Unit 2 Lecturer Notes of Linear Programming of or by DRDocument46 pagesUnit 2 Lecturer Notes of Linear Programming of or by DRSharath ChandraNo ratings yet
- Four Special Cases in SimplexDocument51 pagesFour Special Cases in SimplexQais87% (15)
- 9 Chapter 4 Simplex MethodDocument19 pages9 Chapter 4 Simplex Methodtanmoy biswasNo ratings yet
- Dual Simplex Method For Solving The PrimalDocument49 pagesDual Simplex Method For Solving The PrimalPotnuru VinayNo ratings yet
- Course Code and Title: Lesson Number: Topic:: Solve LP Problems Using Simplex Maximization MethodDocument10 pagesCourse Code and Title: Lesson Number: Topic:: Solve LP Problems Using Simplex Maximization MethodJessaNo ratings yet
- Two Phase MethodDocument45 pagesTwo Phase Methodzohaib100% (2)
- Opt lp3Document32 pagesOpt lp3no3johnnyNo ratings yet
- The Two-Phase Simplex MethodDocument22 pagesThe Two-Phase Simplex MethodKarthikeyanNo ratings yet
- The Two-Phase Simplex MethodDocument22 pagesThe Two-Phase Simplex Methodbhoopesh2688No ratings yet
- Linear Programming: Simplex Method: ProblemDocument2 pagesLinear Programming: Simplex Method: ProblemPranav SinghNo ratings yet
- MBA AssignmentDocument27 pagesMBA AssignmentTsega YeNo ratings yet
- 1 Simplex MethodDocument17 pages1 Simplex MethodPATRICIA COLINANo ratings yet
- Shife AssDocument14 pagesShife Assshiferaw meleseNo ratings yet
- CJ - ZJ Method SimplexDocument7 pagesCJ - ZJ Method SimplexChandra SekharNo ratings yet
- Duality in LPPDocument8 pagesDuality in LPPTibelchNo ratings yet
- Linear-Programming 101Document13 pagesLinear-Programming 101Rabin Bajagain.No ratings yet
- CH 03 Simplex Method and Sensitivity AnalysisDocument121 pagesCH 03 Simplex Method and Sensitivity AnalysisAura fairuzNo ratings yet
- Unit 1 Linear Programming ProblemDocument56 pagesUnit 1 Linear Programming ProblemSofoniasNo ratings yet
- 6 Sensitivity Analysis: 6.1 Changes in Right-Hand Side BDocument5 pages6 Sensitivity Analysis: 6.1 Changes in Right-Hand Side Bhatemakeedy1969No ratings yet
- Simplex Algorithm - IDocument36 pagesSimplex Algorithm - INishant RajpootNo ratings yet
- Quadratic ProgrammingDocument38 pagesQuadratic ProgrammingAngad SehdevNo ratings yet
- Simplex Method: March 2015Document19 pagesSimplex Method: March 2015Lalita LakraNo ratings yet
- Special Cases-Matrix FormulationDocument68 pagesSpecial Cases-Matrix FormulationSudhanwa KulkarniNo ratings yet
- Homework 1: ST NDDocument13 pagesHomework 1: ST NDÖzlem YurtseverNo ratings yet
- Simplex ProcedureDocument4 pagesSimplex ProcedureRajesh NakotiNo ratings yet
- Simplex Method - Linear Programming ProblemsDocument10 pagesSimplex Method - Linear Programming Problemsjub4jiveNo ratings yet
- 18 Dual Simplex & SensitivityDocument17 pages18 Dual Simplex & SensitivitySiddhanth SharmaNo ratings yet
- 18 Sensi 1Document24 pages18 Sensi 1Potnuru VinayNo ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Hillier and Lieberman Problem 14.4-2 Page 746Document27 pagesHillier and Lieberman Problem 14.4-2 Page 746Potnuru VinayNo ratings yet
- Determination of Starting Basic Feasible SolutionDocument12 pagesDetermination of Starting Basic Feasible SolutionPotnuru VinayNo ratings yet
- Game Theory: Strategies Selected by The AdversariesDocument54 pagesGame Theory: Strategies Selected by The AdversariesPotnuru VinayNo ratings yet
- 26 PertDocument25 pages26 PertPotnuru VinayNo ratings yet
- Iterative Computations of The Transportation AlgorithmDocument35 pagesIterative Computations of The Transportation AlgorithmPotnuru VinayNo ratings yet
- 18 Sensi 1Document24 pages18 Sensi 1Potnuru VinayNo ratings yet
- Addition of A New ConstraintDocument22 pagesAddition of A New ConstraintPotnuru VinayNo ratings yet
- The Transportation Model - FormulationsDocument26 pagesThe Transportation Model - FormulationsPotnuru VinayNo ratings yet
- Dual Simplex Method For Solving The PrimalDocument49 pagesDual Simplex Method For Solving The PrimalPotnuru VinayNo ratings yet
- Some Problems Illustrating The Principles of DualityDocument22 pagesSome Problems Illustrating The Principles of DualityPotnuru VinayNo ratings yet
- Duality Theorems Finding The Dual Optimal Solution From The Primal Optimal TableauDocument25 pagesDuality Theorems Finding The Dual Optimal Solution From The Primal Optimal TableauPotnuru VinayNo ratings yet
- In This Presentation We Illustrate The Ideas Developed in The Previous Presentation With Two More ProblemsDocument21 pagesIn This Presentation We Illustrate The Ideas Developed in The Previous Presentation With Two More ProblemsPotnuru VinayNo ratings yet
- Explanation of The Entries in Any Simplex Tableau in Terms of The Entries of The Starting TableauDocument33 pagesExplanation of The Entries in Any Simplex Tableau in Terms of The Entries of The Starting TableauPotnuru VinayNo ratings yet
- Matrix Formulation of The LppsDocument13 pagesMatrix Formulation of The LppsPotnuru VinayNo ratings yet
- Minimize Subject To The Constraints: X X X XDocument16 pagesMinimize Subject To The Constraints: X X X XPotnuru VinayNo ratings yet
- X X X X: Minimize Subject To The ConstraintsDocument15 pagesX X X X: Minimize Subject To The ConstraintsPotnuru VinayNo ratings yet
- 2-D Static Truss: Step 9: Validate The ResultsDocument2 pages2-D Static Truss: Step 9: Validate The ResultsPotnuru VinayNo ratings yet
- Artificial Variable Techniques - Big M-MethodDocument26 pagesArtificial Variable Techniques - Big M-MethodPotnuru VinayNo ratings yet
- Final Project Report: F.O.B.O Floppy Box Robot An Experiment A.I and Machine LearningDocument44 pagesFinal Project Report: F.O.B.O Floppy Box Robot An Experiment A.I and Machine LearningPotnuru VinayNo ratings yet
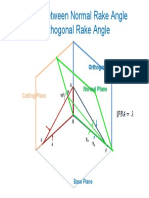
- Normal Rake AngleDocument1 pageNormal Rake AnglePotnuru VinayNo ratings yet
- Problem Set 2Document2 pagesProblem Set 2Potnuru VinayNo ratings yet
- 01 Formulation of LPPsDocument36 pages01 Formulation of LPPsMeghashyam SandeepNo ratings yet
- 2-D Static Truss: Author: E-Mail: Rb88@cornell - EduDocument2 pages2-D Static Truss: Author: E-Mail: Rb88@cornell - EduPotnuru VinayNo ratings yet
- Midterm Exam Linear AlgebraDocument3 pagesMidterm Exam Linear AlgebraSohaib ChoudharyNo ratings yet
- Algebraic Expressions and Identities Assignment 10 PDFDocument6 pagesAlgebraic Expressions and Identities Assignment 10 PDFFredrick RodriguesNo ratings yet
- DeepLearning Practice Question AnswersDocument43 pagesDeepLearning Practice Question AnswersPaul GeorgeNo ratings yet
- ODE Solver in MATLABDocument15 pagesODE Solver in MATLABKailasham RamalingamNo ratings yet
- American University of Sharjah: NGN 509 - Computational Methods Professor Nai-Shyong Yeh Assignment #2Document5 pagesAmerican University of Sharjah: NGN 509 - Computational Methods Professor Nai-Shyong Yeh Assignment #2Mohammed AlmoriseyNo ratings yet
- LAMPIRANDocument49 pagesLAMPIRANInri Gloria TampiNo ratings yet
- 02-1 Linear Algebraic EquationsDocument29 pages02-1 Linear Algebraic EquationsAseel OtoumNo ratings yet
- Skip GramDocument37 pagesSkip GramShikha JainNo ratings yet
- Numerical Solution of Ordinary Differential Equations (ODE) : Boundary Value Problem (BVP)Document18 pagesNumerical Solution of Ordinary Differential Equations (ODE) : Boundary Value Problem (BVP)আসিফ রেজাNo ratings yet
- 3 - Algebraic ExpressionDocument23 pages3 - Algebraic ExpressionCeledonio, Joanah Mae B.No ratings yet
- Curse of Dimensionality and Its ReductionDocument5 pagesCurse of Dimensionality and Its ReductionSameer KattelNo ratings yet
- Contours For 0.1 Range: (0.6,1.0)Document2 pagesContours For 0.1 Range: (0.6,1.0)Abhijit KushwahaNo ratings yet
- Nvidia Fundamentals of Deep Learning PPT 4Document19 pagesNvidia Fundamentals of Deep Learning PPT 4RonNo ratings yet
- Simplex Method Incase of Artificial Variables " "Document13 pagesSimplex Method Incase of Artificial Variables " "Arduino ExplorerNo ratings yet
- High-Precision Abscissae and Weights of Gaussian QuadratureDocument12 pagesHigh-Precision Abscissae and Weights of Gaussian QuadratureRMolina65No ratings yet
- A Maximal Covering Location Model in The Presence of Partial CoverageDocument12 pagesA Maximal Covering Location Model in The Presence of Partial Coveragerodolfo123456789No ratings yet
- Isye 6669 Midterm Practice: Instructors: Prof. Andy SunDocument10 pagesIsye 6669 Midterm Practice: Instructors: Prof. Andy SunhaoNo ratings yet
- Lec 2 - Modeling With LPDocument11 pagesLec 2 - Modeling With LPIfeanyi SnydersNo ratings yet
- Polynomial FunctionDocument6 pagesPolynomial FunctionSaifodin AlangNo ratings yet
- Neural Networks:: Basics Using MATLABDocument54 pagesNeural Networks:: Basics Using MATLABBob AssanNo ratings yet
- EE331 - L07 - Signals & SystemsDocument30 pagesEE331 - L07 - Signals & Systemsahmetyasinbulut99No ratings yet
- Approximations Quiz 38Document6 pagesApproximations Quiz 38Aatray RanjanNo ratings yet
- Practice Problem: Chapter 15, Short Term Scheduling Problem 1Document9 pagesPractice Problem: Chapter 15, Short Term Scheduling Problem 1Lâm Thanh Huyền NguyễnNo ratings yet
- Blocplan TheoryDocument48 pagesBlocplan TheoryswarajNo ratings yet
- AI Learning ResourcesDocument6 pagesAI Learning Resourcesrip asawNo ratings yet
- Unit 2 - Week 1: Assignment 01Document3 pagesUnit 2 - Week 1: Assignment 01Saurabh0% (2)
- Tugas Analisis Regresi - 220020076 - Novita Ratna DewiDocument17 pagesTugas Analisis Regresi - 220020076 - Novita Ratna DewiNOVITA RATNASMK PGRI 1 GRESIKNo ratings yet
- Grade 8 Mathematics First Quarter: Activityno.2Document2 pagesGrade 8 Mathematics First Quarter: Activityno.2Jeadryl LinatocNo ratings yet
- Numerical Evaluation of Integrals With Weight Function ? ? Using Gauss Legendre Quadrature RulesDocument6 pagesNumerical Evaluation of Integrals With Weight Function ? ? Using Gauss Legendre Quadrature RulesIOSRjournalNo ratings yet