You might also like
- Image SegmentationDocument80 pagesImage SegmentationsonofrsNo ratings yet
- MATLAB Image Processing SoftwareDocument17 pagesMATLAB Image Processing Softwareengamro85100% (1)
- Lab Manual Image ProcessingDocument28 pagesLab Manual Image ProcessingVinita ChoudharyNo ratings yet
- Digital Image ProcessingDocument40 pagesDigital Image ProcessingAltar TarkanNo ratings yet
- Digital Image ProcessingDocument27 pagesDigital Image Processingainugiri91% (11)
- 6 Image Segmentation CombinedDocument40 pages6 Image Segmentation CombinedMuhammad Zaka Ud DinNo ratings yet
- Image Processing Using Matlab - Learning ToolDocument70 pagesImage Processing Using Matlab - Learning Toolskypillar88No ratings yet
- Image Processing Notes Citstudents inDocument92 pagesImage Processing Notes Citstudents insmeena100% (1)
- DCT Image CompressionDocument10 pagesDCT Image CompressionSivaranjan Goswami100% (1)
- Image Enhancement in Spatial DomainDocument24 pagesImage Enhancement in Spatial DomainDeepashri_HKNo ratings yet
- Digital Image ProcessingDocument15 pagesDigital Image ProcessingDeepak GourNo ratings yet
- L5 CPE410 391 Image SegmentationDocument30 pagesL5 CPE410 391 Image SegmentationAhmed SaidNo ratings yet
- Digital Image Processing - Lecture Weeks 11 and 12Document60 pagesDigital Image Processing - Lecture Weeks 11 and 12Jorma KekalainenNo ratings yet
- Digital Image Processing (Image Restoration)Document34 pagesDigital Image Processing (Image Restoration)MATHANKUMAR.S100% (2)
- Digital Image Processing - Lecture NotesDocument32 pagesDigital Image Processing - Lecture NotesJerrin Thomas Panachakel0% (1)
- Image Processing Techniques ExplainedDocument17 pagesImage Processing Techniques Explainedlovelysoni9133% (3)
- Digital Image Processing LabDocument30 pagesDigital Image Processing LabSami ZamaNo ratings yet
- Basics of Image Processing in Matlab Lab File PDFDocument86 pagesBasics of Image Processing in Matlab Lab File PDFjagroop kaurNo ratings yet
- Image Processing QBDocument29 pagesImage Processing QBsubramanyam62100% (1)
- DIP Question BankDocument9 pagesDIP Question Bankapi-3772517No ratings yet
- Introduction to Essential Image Processing ConceptsDocument39 pagesIntroduction to Essential Image Processing ConceptsawaraNo ratings yet
- Ec 1009 - Digital Image ProcessingDocument30 pagesEc 1009 - Digital Image Processingainugiri75% (4)
- Image Enhancement Frequency DomainDocument42 pagesImage Enhancement Frequency Domainresmi_ng100% (2)
- Assignment On Digital Image ProcessingDocument7 pagesAssignment On Digital Image ProcessingAshish Saikia0% (1)
- MATLAB Image Processing WorkshopDocument52 pagesMATLAB Image Processing WorkshopAmarjeetsingh ThakurNo ratings yet
- Question BankDocument37 pagesQuestion BankViren PatelNo ratings yet
- Digital Image Processing NotesDocument363 pagesDigital Image Processing NotesKumbagalla ShivaNo ratings yet
- Image Compression FundamentalsDocument84 pagesImage Compression Fundamentalsresmi_ng85% (13)
- Digital Image ProcessingDocument46 pagesDigital Image Processingshakti139100% (1)
- Edge Detection Techniques For Image SegmentationDocument9 pagesEdge Detection Techniques For Image SegmentationAnonymous Gl4IRRjzNNo ratings yet
- Digital Image Processing Question BankDocument29 pagesDigital Image Processing Question BankVenkata Krishna100% (3)
- Digital Image ProcessingDocument23 pagesDigital Image Processinglini mohanNo ratings yet
- Dip McqsDocument21 pagesDip McqsSonalNo ratings yet
- Discrete Wavelet Transform (DWT) : Presented byDocument44 pagesDiscrete Wavelet Transform (DWT) : Presented byanila allamNo ratings yet
- Image ProcessingDocument92 pagesImage Processingayushi singhNo ratings yet
- Digital Image CompressionDocument19 pagesDigital Image CompressionRitu PareekNo ratings yet
- Digital Image Processing IntroductionDocument123 pagesDigital Image Processing IntroductionDeepa SNo ratings yet
- Seminar On "Image Processing"Document20 pagesSeminar On "Image Processing"Sudhir Phophaliya100% (1)
- BG3801 L3 Medical Image Processing 14-15Document18 pagesBG3801 L3 Medical Image Processing 14-15feiboiNo ratings yet
- Chapter 10Document51 pagesChapter 10Raji Prasad100% (1)
- Adaptive Thresholding Using Quadratic Cost FunctionsDocument27 pagesAdaptive Thresholding Using Quadratic Cost FunctionsAI Coordinator - CSC JournalsNo ratings yet
- Dspmanual MATLABDocument83 pagesDspmanual MATLABAbhishek PandeyNo ratings yet
- Chapter 6. Image SegmentationDocument83 pagesChapter 6. Image SegmentationĐình HạnhNo ratings yet
- Chapter III - Image EnhancementDocument64 pagesChapter III - Image EnhancementDr. Manjusha Deshmukh100% (1)
- Image Processing Using MatlabDocument66 pagesImage Processing Using MatlabSupratik Sarkar100% (1)
- Digital Image Processing - 2 Marks-Questions and AnswersDocument19 pagesDigital Image Processing - 2 Marks-Questions and AnswersnikitatayaNo ratings yet
- Image Processing QuestionsDocument4 pagesImage Processing QuestionsabhinavNo ratings yet
- Digital Image Processing Exam QuestionsDocument4 pagesDigital Image Processing Exam QuestionsAishwarya ThawariNo ratings yet
- Matlab Fonction Image ProcessingDocument5 pagesMatlab Fonction Image ProcessingJawad MaalNo ratings yet
- Image Segmentation, Representation and DescriptionDocument40 pagesImage Segmentation, Representation and DescriptionButta Rajasekhar100% (1)
- Matlab Code For Image Compression Using SPIHT AlgorithmDocument19 pagesMatlab Code For Image Compression Using SPIHT AlgorithmArsenalBestlyNo ratings yet
- Image Segmentation in Digital Image ProcessingDocument71 pagesImage Segmentation in Digital Image ProcessingSATYAM GUPTANo ratings yet
- Qustionbank1 12Document40 pagesQustionbank1 12Bhaskar VeeraraghavanNo ratings yet
- Minor Project Report On Image CompressionDocument8 pagesMinor Project Report On Image CompressionRohanPathakNo ratings yet
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- ImSeg 10 11 18Document41 pagesImSeg 10 11 18AbhishemNo ratings yet
- DIP Mod 4 Segment Part ADocument58 pagesDIP Mod 4 Segment Part AshivubhavvNo ratings yet
- Understanding Regions and Region Segmentation: by Nayan KhinvasaraDocument59 pagesUnderstanding Regions and Region Segmentation: by Nayan KhinvasaraDeepali GawadeNo ratings yet
- Segmentation 03Document33 pagesSegmentation 03Thilaga MohanNo ratings yet
- Klasifikasi Gambar MedisDocument23 pagesKlasifikasi Gambar MedisAnnisacakeshop YasminNo ratings yet
- Coin Change ProblemDocument3 pagesCoin Change Problemnaveednad2003556No ratings yet
- Problems To Ace Coding InterviewsDocument24 pagesProblems To Ace Coding Interviewsnaveednad2003556No ratings yet
- Englishcolorad 22.07.2014Document1 pageEnglishcolorad 22.07.2014naveednad2003556No ratings yet
- Postal MtsDocument8 pagesPostal Mtsnaveednad2003556No ratings yet
- Quite SleepDocument66 pagesQuite Sleepnaveednad2003556No ratings yet
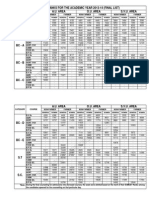
- Agriculture Last Ranks 2013-14Document2 pagesAgriculture Last Ranks 2013-14Vinay ReddyNo ratings yet
- Basic GPS concept explainedDocument3 pagesBasic GPS concept explainednaveednad2003556100% (1)
- APPSC ASOs Computer Science Paper - II - 2012Document18 pagesAPPSC ASOs Computer Science Paper - II - 2012naveednad2003556No ratings yet
- Naveed ResumeDocument4 pagesNaveed Resumenaveednad2003556No ratings yet
- Career PDF CWE Clerks IV AdvtDocument34 pagesCareer PDF CWE Clerks IV Advtnaveednad2003556No ratings yet
- ASIC Power Groid AnalysisDocument121 pagesASIC Power Groid AnalysisNilesh IngaleNo ratings yet
- PHD MPhil BrochureDocument9 pagesPHD MPhil Brochurenaveednad2003556No ratings yet
- ECE Adhoc Advt. MAy 2014Document2 pagesECE Adhoc Advt. MAy 2014naveednad2003556No ratings yet
- Employment News Men Jun 2014 FinalDocument2 pagesEmployment News Men Jun 2014 Finalnaveednad2003556No ratings yet
- Sbi Assistant Clerk Notification 2014Document5 pagesSbi Assistant Clerk Notification 2014Telugu VaahiniNo ratings yet
- Java J2EE Job Interview Companion - K.arulkumaranDocument237 pagesJava J2EE Job Interview Companion - K.arulkumaranAnu SreekumarNo ratings yet
- IBPS PO4 CLK 4 RRB 3 CalenderDocument2 pagesIBPS PO4 CLK 4 RRB 3 CalenderSreejith Sundar PalavilaNo ratings yet
- How To Become A Great FinisherDocument2 pagesHow To Become A Great Finishernaveednad2003556No ratings yet
- App Faculty Recruitment14Document4 pagesApp Faculty Recruitment14naveednad2003556No ratings yet
- BER and SNRDocument8 pagesBER and SNRshervinshNo ratings yet
- Efficient Implementation of Hummingbird Cryptographic Algorithm On A Reconfigurable PlatformDocument5 pagesEfficient Implementation of Hummingbird Cryptographic Algorithm On A Reconfigurable Platformnaveednad2003556No ratings yet
- Cryptanalysis of Hummingbird-1Document23 pagesCryptanalysis of Hummingbird-1naveednad2003556100% (1)
- Staff Selection Commission P&P-II Section: Notice ForDocument1 pageStaff Selection Commission P&P-II Section: Notice Fornaveednad2003556No ratings yet
- The Hummingbird-2 Lightweight Authenticated Encryption AlgorithmDocument14 pagesThe Hummingbird-2 Lightweight Authenticated Encryption Algorithmnaveednad2003556No ratings yet
- Implementing Hamming Code Using VLSIDocument5 pagesImplementing Hamming Code Using VLSInaveednad2003556No ratings yet
- Approved Annual Programme 2014Document1 pageApproved Annual Programme 2014Kiran KumarNo ratings yet
- Enhanced FPGA Implementation of The Hummingbird Cryptographic AlgorithmDocument11 pagesEnhanced FPGA Implementation of The Hummingbird Cryptographic Algorithmnaveednad2003556No ratings yet
- Dataflow Modeling and Design For Cognitive Radio NetworksDocument6 pagesDataflow Modeling and Design For Cognitive Radio Networksnaveednad2003556No ratings yet
- 2-Lecture Notes Lesson3 6Document4 pages2-Lecture Notes Lesson3 6kstu1112No ratings yet
- The Advantages and Disadvantages of FIFO MehtodDocument5 pagesThe Advantages and Disadvantages of FIFO Mehtodnaveednad2003556100% (1)
- 2 - PhET Simulation - Color VisionDocument3 pages2 - PhET Simulation - Color VisionAva MittoneNo ratings yet
- CME Camera OperationDocument42 pagesCME Camera OperationDenis LedentNo ratings yet
- Photogram Lesson RubricDocument2 pagesPhotogram Lesson Rubricapi-295031678No ratings yet
- Departemen Ilmu Kesehatan Mata Fakultas Kedokteran Universitas Padjadjaran Pusat Mata Nasional Rumah Sakit Mata Cicendo BandungDocument11 pagesDepartemen Ilmu Kesehatan Mata Fakultas Kedokteran Universitas Padjadjaran Pusat Mata Nasional Rumah Sakit Mata Cicendo BandungBambang RinandiNo ratings yet
- Comparison Chart: 10x42 L IS 18x50 IS 15x50 IS 12x36 IS IIIDocument1 pageComparison Chart: 10x42 L IS 18x50 IS 15x50 IS 12x36 IS IIICraig ThompsonNo ratings yet
- GlaucomaDocument42 pagesGlaucomaBombomNo ratings yet
- How To CritiqueDocument41 pagesHow To CritiqueCeloSakiNo ratings yet
- Mains Level Puzzle PDF For IBPS PO Mains 2018 From Exampundit - inDocument17 pagesMains Level Puzzle PDF For IBPS PO Mains 2018 From Exampundit - inRam kumarNo ratings yet
- 928 Progressive IPDDocument7 pages928 Progressive IPDShiva ShankarNo ratings yet
- Photoshop Advanced Techniques 1Document3 pagesPhotoshop Advanced Techniques 1Rahma Elvira TanjungNo ratings yet
- Pedestrian Detection Based On Background Compensation With Block-Matching AlgorithmDocument5 pagesPedestrian Detection Based On Background Compensation With Block-Matching AlgorithmSoulayma GazzehNo ratings yet
- OpenCV With Python Blueprints - Sample ChapterDocument30 pagesOpenCV With Python Blueprints - Sample ChapterPackt PublishingNo ratings yet
- Cannot See The Nearby Objects.: Material Downloaded From - 1 / 5Document5 pagesCannot See The Nearby Objects.: Material Downloaded From - 1 / 5Jagpreet SinghNo ratings yet
- The Use of Colour in Cinematography Storytelling Genre PDFDocument74 pagesThe Use of Colour in Cinematography Storytelling Genre PDFmutableS100% (2)
- DOC-20230508-WA0002. - (3 Files Merged)Document15 pagesDOC-20230508-WA0002. - (3 Files Merged)Mahesh N 22MVD0090No ratings yet
- How To Photograph Architecture - Interior, Philip Greenspun PDFDocument15 pagesHow To Photograph Architecture - Interior, Philip Greenspun PDFjationonaNo ratings yet
- Electrical Wire Color CodesDocument6 pagesElectrical Wire Color CodesBanan PajamNo ratings yet
- Aoptic LensometersDocument9 pagesAoptic Lensometersapi-3856548No ratings yet
- Art Elements and Principles: Visual Lesson on Line, Color TheoryDocument20 pagesArt Elements and Principles: Visual Lesson on Line, Color TheoryPerly CielyNo ratings yet
- Dr.Asi Reddy's Guide to Preventing Blindness in IndiaDocument33 pagesDr.Asi Reddy's Guide to Preventing Blindness in IndiaVarun BoddulaNo ratings yet
- COSINA Compact 35s Automatic Electric Eye ESDocument39 pagesCOSINA Compact 35s Automatic Electric Eye ESJavierNo ratings yet
- Dr. Moyeen Eye Care Network at Department of Vision Therapy - ?TYPES OF CORNEAL OPACITY ? Depending On The Density, Corneal OpDocument1 pageDr. Moyeen Eye Care Network at Department of Vision Therapy - ?TYPES OF CORNEAL OPACITY ? Depending On The Density, Corneal OpDarshan AxelNo ratings yet
- Bresser NV 5x50 Digital Night VisionDocument5 pagesBresser NV 5x50 Digital Night VisionSparklight JackNo ratings yet
- Visul QDocument3 pagesVisul QJithuJohnNo ratings yet
- SR No. Description Ref No. QTR inventory reportDocument2 pagesSR No. Description Ref No. QTR inventory reportSaqib AfridiNo ratings yet
- Maintaining Color Integrity in Digital Photography: David Dunthorn C F Systems February 29, 2004Document21 pagesMaintaining Color Integrity in Digital Photography: David Dunthorn C F Systems February 29, 2004bungabunga19No ratings yet
- Screenshot 2024-02-02 at 7.09.27 PMDocument8 pagesScreenshot 2024-02-02 at 7.09.27 PMDr Deepti KakkarNo ratings yet
- Detection Iris Melanoma in Human EyeDocument2 pagesDetection Iris Melanoma in Human EyeIJIERT-International Journal of Innovations in Engineering Research and TechnologyNo ratings yet
- SAS 3rd Party Logo Usage GuideDocument7 pagesSAS 3rd Party Logo Usage GuideThomas GrantNo ratings yet
- Ophthalmology-OSCE ReviewerDocument27 pagesOphthalmology-OSCE ReviewerGhia Villanueva Dijamco75% (4)