You might also like
- Common EmitterDocument3 pagesCommon EmitterRavi Teja100% (1)
- EEL 3304C - Design and Experiment Project Lab # 4 Common-Emitter AmplifierDocument4 pagesEEL 3304C - Design and Experiment Project Lab # 4 Common-Emitter AmplifierHarshaNo ratings yet
- ECADDocument110 pagesECADJanica Janelle ReloxeNo ratings yet
- Concept of Data and Information, Information SystemsDocument8 pagesConcept of Data and Information, Information SystemsAshish DixitNo ratings yet
- Pid ControllerDocument27 pagesPid ControllerAngel AngeleyeNo ratings yet
- Document 1Document2 pagesDocument 1pogiverNo ratings yet
- SisoTool TutorialDocument3 pagesSisoTool TutorialJefferson P. MouraNo ratings yet
- Implementation of Electronic Cruise Control System in A BikeDocument5 pagesImplementation of Electronic Cruise Control System in A BikeRanga SriNo ratings yet
- Computer General Knowledge QuestionSDocument27 pagesComputer General Knowledge QuestionSAshokNo ratings yet
- TC PLC Lib Controller ToolboxDocument180 pagesTC PLC Lib Controller ToolboxPedro VieiraNo ratings yet
- Real Time SystemsDocument127 pagesReal Time SystemsSuraj Kandpal50% (2)
- Final Report On Line Follower RobotDocument44 pagesFinal Report On Line Follower RobotAjay Verma50% (4)
- Lenovo Thinkpad X200Document62 pagesLenovo Thinkpad X200dirkstrangerNo ratings yet
- Internet of Things (IoT)Document6 pagesInternet of Things (IoT)Kunal KishoreNo ratings yet
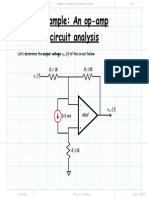
- Example An Op Amp Circuit Analysis LectureDocument23 pagesExample An Op Amp Circuit Analysis LectureAthiyo MartinNo ratings yet
- Auto Ingenuity Scantool User GuideDocument122 pagesAuto Ingenuity Scantool User GuideiBusinessLogicNo ratings yet
- Mechanical ThrombectomyDocument58 pagesMechanical Thrombectomyres.uditacharyaNo ratings yet
- Basic Computer PeripheralsDocument11 pagesBasic Computer PeripheralsPc TutorNo ratings yet
- Timer Counter Modes 8051 Microprocessor DesignDocument30 pagesTimer Counter Modes 8051 Microprocessor Designcleopatra2121No ratings yet
- Inverter 12VDC To 220VAC 100 Watt by Power Transistor 2N3055Document19 pagesInverter 12VDC To 220VAC 100 Watt by Power Transistor 2N3055Bank100% (1)
- AFM To MAF ConversionDocument11 pagesAFM To MAF ConversionRonnie Peterson100% (1)
- Unit 1: Rehabilitation EngineeringDocument19 pagesUnit 1: Rehabilitation EngineeringPrasidha PrabhuNo ratings yet
- Automatic Anesthesia Controller Using Heart Beat Sensor-MEDICAL ELECTRONICS PROJECTSDocument6 pagesAutomatic Anesthesia Controller Using Heart Beat Sensor-MEDICAL ELECTRONICS PROJECTSR.ASHOKKUMAAR100% (2)
- Characteristics of Non-Linear SystemsDocument24 pagesCharacteristics of Non-Linear SystemsCarlynMNo ratings yet
- Central Processing UnitDocument61 pagesCentral Processing UnitLasithaNo ratings yet
- Catalog Sheet T550 UH50 enDocument21 pagesCatalog Sheet T550 UH50 enbeanxinhNo ratings yet
- ComputerDocument5 pagesComputermrskalakandaNo ratings yet
- Bayanihan Act.Document2 pagesBayanihan Act.Eljames Geronimo LagatNo ratings yet
- What Is The Process For Removing MAX Database Corruption - National Instruments PDFDocument4 pagesWhat Is The Process For Removing MAX Database Corruption - National Instruments PDFAnonymous vcdqCTtS9No ratings yet
- Usecase Diagram For Point of Sale Machine: CustomerDocument17 pagesUsecase Diagram For Point of Sale Machine: CustomerAadil SafiNo ratings yet
- Microcontroller Based Anesthesia InjectorDocument7 pagesMicrocontroller Based Anesthesia InjectorSai KarthikNo ratings yet
- Microprocessors, Micro Controller Assembly LanguageDocument60 pagesMicroprocessors, Micro Controller Assembly LanguageRikesh BhattacharyyaNo ratings yet
- Smart Shopping Cart IEEE PDFDocument4 pagesSmart Shopping Cart IEEE PDFradz248100% (3)
- Technical Specifications For Dialysis MachineDocument2 pagesTechnical Specifications For Dialysis MachineJohn Son G100% (1)
- Real Time SystemsDocument27 pagesReal Time SystemsSimmi JoshiNo ratings yet
- Chapter 5 Interrupt Operations PDFDocument19 pagesChapter 5 Interrupt Operations PDFprashant lamsalNo ratings yet
- AN INTRODUCTION TO INTERRUPTS ON THE 8086 MICROPROCESSORDocument9 pagesAN INTRODUCTION TO INTERRUPTS ON THE 8086 MICROPROCESSORDavid BusieneiNo ratings yet
- ARM Processor CoreDocument34 pagesARM Processor CorevarshaksNo ratings yet
- 8086 Interrupt System: By. M. ChinyukuDocument29 pages8086 Interrupt System: By. M. ChinyukuProsper MuzendaNo ratings yet
- Lecture 7Document26 pagesLecture 7ShazidNo ratings yet
- Unit 2 Part I InterruptsDocument40 pagesUnit 2 Part I InterruptsRaghavendrachari KNo ratings yet
- Unit2 COADocument8 pagesUnit2 COASk ShettyNo ratings yet
- 2 OsDocument58 pages2 Osaliahsan007838383No ratings yet
- Arm Cortex M4Document42 pagesArm Cortex M4kunduru laxmi pavanNo ratings yet
- InterruptsDocument4 pagesInterruptsProff MuchNo ratings yet
- COA Mod3@AzDOCUMENTS - inDocument9 pagesCOA Mod3@AzDOCUMENTS - inINDIAN LEGENDSNo ratings yet
- 03 MSP430 InterruptsDocument26 pages03 MSP430 InterruptsFadila KhadarNo ratings yet
- Srmist Department of It 15It314J-Principles of Operating Systems Cycle Test-1 Answer Key Part - BDocument8 pagesSrmist Department of It 15It314J-Principles of Operating Systems Cycle Test-1 Answer Key Part - BPandiaraj RajNo ratings yet
- Interrupts and Interrupt Processing ExplainedDocument32 pagesInterrupts and Interrupt Processing ExplainedObed AttaNo ratings yet
- Mit IiDocument190 pagesMit IiSaurabh MishraNo ratings yet
- Unit-3 Part-A MPMCDocument17 pagesUnit-3 Part-A MPMCsubbaraoNo ratings yet
- 8086 Interrupt Types and FunctionsDocument3 pages8086 Interrupt Types and FunctionsHarini HoneyNo ratings yet
- Interrupts of 8085Document3 pagesInterrupts of 8085abd ulbaqiNo ratings yet
- VHDL Implementation of Interrupt Controller PDFDocument5 pagesVHDL Implementation of Interrupt Controller PDFKochuzNo ratings yet
- Unit2 Io Organization 97 2003Document97 pagesUnit2 Io Organization 97 2003Apoorva JagtapNo ratings yet
- Lecture 3Document39 pagesLecture 3Joseph AntoNo ratings yet
- UntitledDocument6 pagesUntitledPriyesh BhalalaNo ratings yet
- 08 - NvicDocument29 pages08 - NvicSeif Al-dein AhmedNo ratings yet
- 6 Interrupts and PollingDocument5 pages6 Interrupts and PollingJames DoolinNo ratings yet
- 8086 Interrupts and Interrupt ResponsesDocument8 pages8086 Interrupts and Interrupt ResponsesNiharika KorukondaNo ratings yet
- Queuing ModelsDocument1 pageQueuing ModelsKalpit SeksariaNo ratings yet
- SwappingDocument5 pagesSwappingKalpit SeksariaNo ratings yet
- Ethernet ArchitectureDocument9 pagesEthernet ArchitectureKalpit SeksariaNo ratings yet
- Distance Learning LeaderDocument21 pagesDistance Learning LeaderKollol MazumderNo ratings yet
- DSPDocument21 pagesDSPKalpit SeksariaNo ratings yet
- THE IDEAL REALM: A Perfect WorldDocument10 pagesTHE IDEAL REALM: A Perfect WorldKalpit SeksariaNo ratings yet
- THE IDEAL REALM: A Perfect WorldDocument10 pagesTHE IDEAL REALM: A Perfect WorldKalpit SeksariaNo ratings yet
- THE IDEAL REALM: A Perfect WorldDocument10 pagesTHE IDEAL REALM: A Perfect WorldKalpit SeksariaNo ratings yet
- Practical Training Report BSNLDocument25 pagesPractical Training Report BSNLKalpit SeksariaNo ratings yet
- Bbcode TS3 PDFDocument1 pageBbcode TS3 PDFRoberto MicroNo ratings yet
- Linksys Official Support - Linksys EA6900 AC1900 Smart Wi-Fi Dual-Band Router Frequently Asked QuestionsDocument5 pagesLinksys Official Support - Linksys EA6900 AC1900 Smart Wi-Fi Dual-Band Router Frequently Asked QuestionsRi KiNo ratings yet
- Getting Started with Limelight VisionDocument83 pagesGetting Started with Limelight VisionHuma TajNo ratings yet
- Kerem Kemik CV - Family Doctor ProfileDocument3 pagesKerem Kemik CV - Family Doctor ProfileKerem KemikNo ratings yet
- i5/OS Commands ExplainedDocument18 pagesi5/OS Commands Explainedrachmat99No ratings yet
- Defining a Risk Appetite That WorksDocument38 pagesDefining a Risk Appetite That WorksPRASAD6219No ratings yet
- Soal Pretest Bhs Inggris 2017Document9 pagesSoal Pretest Bhs Inggris 2017RIZKY ELECTRIKA SAPTIAN SAPUTRANo ratings yet
- SML Lab ManuelDocument24 pagesSML Lab Manuelnavin rathiNo ratings yet
- Vertical Crater Retreat Mining in The Sudbury Basin: Mining Science and TechnologyDocument13 pagesVertical Crater Retreat Mining in The Sudbury Basin: Mining Science and TechnologyStajic MilanNo ratings yet
- Template PPT 2Document45 pagesTemplate PPT 2alfiNo ratings yet
- BUMA 30063 Fundamentals of Descriptive Analytics: Compiled By: Mr. Rogene C. EsguerraDocument62 pagesBUMA 30063 Fundamentals of Descriptive Analytics: Compiled By: Mr. Rogene C. EsguerraJuliana Maaba Tay-isNo ratings yet
- FPT BaishanDocument9 pagesFPT Baishantuan anh nguyenNo ratings yet
- DVD Player Service Manual Ver. 1Document176 pagesDVD Player Service Manual Ver. 1peterb99No ratings yet
- How To Encipher and Decipher Codes Using The Hill 2-CipherDocument17 pagesHow To Encipher and Decipher Codes Using The Hill 2-CipherHaftamuNo ratings yet
- A Business Model of Smart Parking Application Using Sensors: Park@Document6 pagesA Business Model of Smart Parking Application Using Sensors: Park@Thapa Shu MeanNo ratings yet
- Ethereum White Paper Made SimpleDocument29 pagesEthereum White Paper Made SimpleSamir BennaniNo ratings yet
- Resistivity and Geophysical Investigations Into The Subsurface Geology at Houghall Grange, Durham, Northern EnglandDocument9 pagesResistivity and Geophysical Investigations Into The Subsurface Geology at Houghall Grange, Durham, Northern EnglandCharlie KenzieNo ratings yet
- 11 CSS Module Week 5Document16 pages11 CSS Module Week 5Alexander IbarretaNo ratings yet
- SMART GRID TECHNOLOGIES EXPLAINEDDocument61 pagesSMART GRID TECHNOLOGIES EXPLAINEDgag aaNo ratings yet
- GRC Rac White PaperDocument6 pagesGRC Rac White Papergogia.brijesh6150No ratings yet
- ESR Review TV Mag Jun05Document2 pagesESR Review TV Mag Jun05Dimitris DimitriadisNo ratings yet
- QC NotesDocument141 pagesQC NotesmccccccNo ratings yet
- 06 Buffer CacheDocument85 pages06 Buffer Cacheraaj9850No ratings yet
- Presentation Asco Acquisition Tcm50 319162Document13 pagesPresentation Asco Acquisition Tcm50 319162naveedfndNo ratings yet
- OKTOPUS For I3Document14 pagesOKTOPUS For I3VANERUM Group - Vision InspiresNo ratings yet
- MMW Module 9Document2 pagesMMW Module 9Gin MananganNo ratings yet
- Epson AcuLaser C900 C1900 Parts and Service ManualDocument267 pagesEpson AcuLaser C900 C1900 Parts and Service ManualstopnaggingmeNo ratings yet
- Manual Técnico Micros ES Raa033benDocument264 pagesManual Técnico Micros ES Raa033benrafael amancioNo ratings yet
- Lampu Philips Model TCW060Document5 pagesLampu Philips Model TCW060Frendi Krisna DewantaraNo ratings yet
- Bickely - Qlik Sense Architecture Basics - TuesdayDocument30 pagesBickely - Qlik Sense Architecture Basics - TuesdayCarlo Serio100% (1)