You might also like
- A Noob's Guide To Things That Move AroundDocument26 pagesA Noob's Guide To Things That Move AroundARKENDU ASHNo ratings yet
- Viva Quastions SegwayDocument11 pagesViva Quastions SegwayEr Md AamirNo ratings yet
- Arduino Motors and FunctionsDocument27 pagesArduino Motors and Functionsmike simsonNo ratings yet
- Practical Controls For Robot Geeks: Ted Larson Winter 2008Document31 pagesPractical Controls For Robot Geeks: Ted Larson Winter 2008Anup ShindeNo ratings yet
- LAB 2-AngeladaDocument20 pagesLAB 2-AngeladaAlehamarie AngeladaNo ratings yet
- Sun Tracking System ReportDocument15 pagesSun Tracking System ReportNibil Ck ßžNo ratings yet
- Basics of Servo System and SimulationDocument45 pagesBasics of Servo System and Simulationgk_gbu100% (1)
- PWM - 556Document2 pagesPWM - 556HaSophim100% (2)
- Stepper and Servo MotorDocument5 pagesStepper and Servo Motorகோகுல்நாத் ஸ்ரீ கிNo ratings yet
- Actuators N EnergizersDocument16 pagesActuators N EnergizersTraic ClubNo ratings yet
- Mahendra Engineering College (Autonomous) : Yaswanth Kumar.SDocument10 pagesMahendra Engineering College (Autonomous) : Yaswanth Kumar.SYãshNo ratings yet
- 555 Timer Universal PWM ControllerDocument4 pages555 Timer Universal PWM ControllerMarius DanilaNo ratings yet
- The Mechanical Aspects of RoboticsDocument19 pagesThe Mechanical Aspects of RoboticsSuryakant MunjewarNo ratings yet
- Smartphone Controlled Arduino Rover PDFDocument30 pagesSmartphone Controlled Arduino Rover PDFWalt Whimpenny100% (1)
- Click On Picture For Larger ViewDocument7 pagesClick On Picture For Larger ViewDhana SingarajaNo ratings yet
- Screw 4Document6 pagesScrew 4Dhana SingarajaNo ratings yet
- GRBL Losing StepsDocument26 pagesGRBL Losing StepsFranciscoNo ratings yet
- ServoDocument7 pagesServohaaenNo ratings yet
- Pulse Width To Voltage Converter: Servo MotorDocument2 pagesPulse Width To Voltage Converter: Servo MotorPraba Karan DNo ratings yet
- Scrap Collecting RobotDocument53 pagesScrap Collecting Robotkumarravishankar100% (3)
- Experiment No. 02: DR D Y Patil School of Engineering & TechnologyDocument3 pagesExperiment No. 02: DR D Y Patil School of Engineering & Technologypradnya sadigaleNo ratings yet
- Experiment No. 02: DR D Y Patil School of Engineering & TechnologyDocument3 pagesExperiment No. 02: DR D Y Patil School of Engineering & Technologypradnya sadigaleNo ratings yet
- Servo Motor Speed and Direction ControlDocument7 pagesServo Motor Speed and Direction Controltazeb100% (1)
- Image Processing of Sidescan SonarDocument7 pagesImage Processing of Sidescan SonarAlex NicksonNo ratings yet
- CNC DS0300 ProblemDocument7 pagesCNC DS0300 ProblemHairedinNo ratings yet
- Electronic Basics #25: Servos and How To Use Them: Servo MotorDocument13 pagesElectronic Basics #25: Servos and How To Use Them: Servo MotorToàn HerreraNo ratings yet
- Preface: Speed Control of DC Motor Using PWM By-Yash DoshiDocument11 pagesPreface: Speed Control of DC Motor Using PWM By-Yash Doshirochmat100% (1)
- Aparent ProjectDocument14 pagesAparent ProjectbernabasNo ratings yet
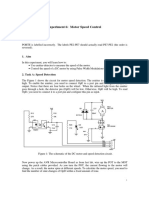
- Experiment 6: Motor Speed Control: ErratumDocument5 pagesExperiment 6: Motor Speed Control: ErratumBambang PrasetyoNo ratings yet
- ICT Use in Everyday LifeDocument32 pagesICT Use in Everyday LifeSami DayeNo ratings yet
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Document63 pagesChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanNo ratings yet
- Project Report: Obstacle Avoiding 4WD Arduino RobotDocument12 pagesProject Report: Obstacle Avoiding 4WD Arduino RobotLahmeen HaiderNo ratings yet
- Robot Project JaseungDocument7 pagesRobot Project JaseungGiri MuruganNo ratings yet
- Motors Convert Electric Energy To Mechanical MotionDocument9 pagesMotors Convert Electric Energy To Mechanical MotionwissamhijaziNo ratings yet
- Mini Self-Running GeneratorDocument12 pagesMini Self-Running Generatorgigi_shmen100% (1)
- BLDC MOTOR and Its ControllerDocument6 pagesBLDC MOTOR and Its ControllerManmeetSinghNo ratings yet
- ENGR 6806 - Motor Control: Prepared By: Rob Collett September 15, 2004Document34 pagesENGR 6806 - Motor Control: Prepared By: Rob Collett September 15, 2004ajai195No ratings yet
- Servo Motor WorkDocument3 pagesServo Motor WorkNaveedNo ratings yet
- ASTS FileDocument15 pagesASTS Filemayank bishtNo ratings yet
- Lesson 2 Obstacle Avoidance CarDocument13 pagesLesson 2 Obstacle Avoidance CarSWNo ratings yet
- Servo Motor ControlDocument72 pagesServo Motor ControlTien-Thinh NguyenNo ratings yet
- Servo?: (Click On Picture For Larger View)Document8 pagesServo?: (Click On Picture For Larger View)Dhana SingarajaNo ratings yet
- Science of TuningDocument8 pagesScience of TuningeacondeNo ratings yet
- Eceg-5401 2Document37 pagesEceg-5401 2Kide Bay0% (1)
- Ac Servo ModesDocument2 pagesAc Servo ModesDineshkumar ThirunavukkarasuNo ratings yet
- The Servo Motor - IntroductionDocument13 pagesThe Servo Motor - IntroductionbobbyccwNo ratings yet
- The Complete Guide To RC ElectronicsDocument37 pagesThe Complete Guide To RC Electronicsleonard1971No ratings yet
- Joe Project RobotDocument19 pagesJoe Project RobotTiruveedula RishendraNo ratings yet
- A Beginner's Guide To Accelerometers What Is An Accelerometer?Document4 pagesA Beginner's Guide To Accelerometers What Is An Accelerometer?kitara234No ratings yet
- How It Works: How Servo Motors WorkDocument2 pagesHow It Works: How Servo Motors WorkChirkov Kire100% (1)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Automotive Actuators and EVAP System TestingFrom EverandAutomotive Actuators and EVAP System TestingRating: 4.5 out of 5 stars4.5/5 (4)
- Automotive Equipment Usage and Repair StrategiesFrom EverandAutomotive Equipment Usage and Repair StrategiesRating: 5 out of 5 stars5/5 (1)
- Automotive Sensor Testing and Waveform AnalysisFrom EverandAutomotive Sensor Testing and Waveform AnalysisRating: 4.5 out of 5 stars4.5/5 (13)
- Learn To Program, Simulate Plc & Hmi In Minutes with Real-World Examples from Scratch. A No Bs, No Fluff Practical Hands-On Project for Beginner to Intermediate: BoxsetFrom EverandLearn To Program, Simulate Plc & Hmi In Minutes with Real-World Examples from Scratch. A No Bs, No Fluff Practical Hands-On Project for Beginner to Intermediate: BoxsetNo ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- 17) Math InstructionDocument4 pages17) Math Instructionupendra35No ratings yet
- 01 Beginers Guide To PneumaticsDocument57 pages01 Beginers Guide To Pneumaticsupendra35No ratings yet
- Compressed Air-Quality Optimisation For Pneumatic Control SystemDocument19 pagesCompressed Air-Quality Optimisation For Pneumatic Control Systemupendra35No ratings yet
- Recorganising The HardwareDocument13 pagesRecorganising The Hardwareupendra35No ratings yet
- Nptel - Iitm.ac - in PDF New-Semesterwise-Reading Comp EngineeringDocument4 pagesNptel - Iitm.ac - in PDF New-Semesterwise-Reading Comp Engineeringupendra35No ratings yet
- 3.4) The Plc's InsideDocument2 pages3.4) The Plc's Insideupendra35No ratings yet
- AutomationDocument2 pagesAutomationupendra35No ratings yet
- Seminar (PLC)Document29 pagesSeminar (PLC)upendra35No ratings yet
- Chapter 6 Induction Motor ConstructionDocument42 pagesChapter 6 Induction Motor Constructionupendra35No ratings yet
- Domestic AC Power Plugs and SocketsDocument34 pagesDomestic AC Power Plugs and Socketsupendra35No ratings yet
- Electropneumatics Basic LevelDocument44 pagesElectropneumatics Basic Levelupendra35No ratings yet
- Auxillary Switch Terminal BlockDocument2 pagesAuxillary Switch Terminal Blockupendra35No ratings yet
- 16) Getting & Moving DataDocument5 pages16) Getting & Moving Dataupendra35No ratings yet
- AC Inputs: Got A Shock? Be Careful) Typically, Ac Input Modules Are AvailableDocument3 pagesAC Inputs: Got A Shock? Be Careful) Typically, Ac Input Modules Are Availableupendra35No ratings yet
- Electric Motor PresentationDocument19 pagesElectric Motor Presentationupendra35No ratings yet
- Analytical Balance. Sensitivity Increases With L, But Decreases With The Weight of The ArmsDocument23 pagesAnalytical Balance. Sensitivity Increases With L, But Decreases With The Weight of The Armsupendra35No ratings yet
- Chap12 Strain MeasurementsDocument33 pagesChap12 Strain Measurementsupendra35No ratings yet
- 7) PLC RegistersDocument3 pages7) PLC Registersupendra35No ratings yet
- 01 Beginers Guide To PneumaticsDocument57 pages01 Beginers Guide To Pneumaticsupendra35No ratings yet
- Festo Electrical, Pneumatic and Logic SymbolsDocument1 pageFesto Electrical, Pneumatic and Logic SymbolsAvtomatika Kole Nehtenin50% (2)
- Starter DrivesDocument9 pagesStarter Drivesupendra35No ratings yet
- Snrs 2Document27 pagesSnrs 2www.otomasyonegitimi.comNo ratings yet
- HelloDocument61 pagesHelloJapinder SinghNo ratings yet
- Recorganising The HardwareDocument13 pagesRecorganising The Hardwareupendra35No ratings yet
- Chapter 6 Induction Motor ConstructionDocument42 pagesChapter 6 Induction Motor Constructionupendra35No ratings yet
- PLCDocument33 pagesPLCupendra35No ratings yet
- Electronic Soft Starters: How and Why They Work, and What They Can Do For YouDocument35 pagesElectronic Soft Starters: How and Why They Work, and What They Can Do For Youupendra35No ratings yet
- Klüberpaste HS 91-21 EN enDocument4 pagesKlüberpaste HS 91-21 EN entroy2k0No ratings yet
- Oxe Um ALE SoftPhone 8AL90653ENAA 1 enDocument36 pagesOxe Um ALE SoftPhone 8AL90653ENAA 1 enlocuras34No ratings yet
- CTX 310 Communication With Fast Ethernet Board V2 (Fanuc)Document34 pagesCTX 310 Communication With Fast Ethernet Board V2 (Fanuc)iveNo ratings yet
- Stars and Galaxies 9th Edition Seeds Test BankDocument20 pagesStars and Galaxies 9th Edition Seeds Test Bankngocalmai0236h100% (32)
- Magnetism: Teacher Notes and Answers 19 MagnetismDocument3 pagesMagnetism: Teacher Notes and Answers 19 Magnetismmahsan abbas100% (1)
- 3 CR Portfolio Dec2012Document94 pages3 CR Portfolio Dec2012mlatif12No ratings yet
- JP MS Ramaiah Edhitha 2015Document21 pagesJP MS Ramaiah Edhitha 2015UtkarshNo ratings yet
- Three-Dimensional Lithium-Ion Battery ModelDocument35 pagesThree-Dimensional Lithium-Ion Battery ModelmortezagashtiNo ratings yet
- Chapter # 1 ChemDocument3 pagesChapter # 1 ChemRana Hassan TariqNo ratings yet
- Quiz 3 Basic ProbabilityDocument38 pagesQuiz 3 Basic ProbabilityjacobtianNo ratings yet
- Nadella Cam Follower PF810EDocument22 pagesNadella Cam Follower PF810EAldair MezaNo ratings yet
- Mole Day Project Report RevisedDocument5 pagesMole Day Project Report Revisedapi-267301173No ratings yet
- PM BCE DCS Crash WebDocument4 pagesPM BCE DCS Crash WebAna Paola VazquezNo ratings yet
- Topic: Partnership: Do Not Distribute - Highly Confidential 1Document7 pagesTopic: Partnership: Do Not Distribute - Highly Confidential 1Tharun NaniNo ratings yet
- Consumer Surplus:: at K Chabveka Economics NotesDocument28 pagesConsumer Surplus:: at K Chabveka Economics NotesShawn DzingayiNo ratings yet
- GenMath11 Q1 Mod26 Domain and Range of Logarithmic Functions 08082020Document19 pagesGenMath11 Q1 Mod26 Domain and Range of Logarithmic Functions 08082020Charity Myrh Pasquin ArzagaNo ratings yet
- PU225 Series: Solenoid ValveDocument1 pagePU225 Series: Solenoid Valveremus popescuNo ratings yet
- Manual AvicadDocument676 pagesManual AvicadOlivia BlanaruNo ratings yet
- 30 TPD4505 - Aluminium Versus Steel in Low-Volume Production of Structural ApplicationsDocument10 pages30 TPD4505 - Aluminium Versus Steel in Low-Volume Production of Structural ApplicationsStefan NaricNo ratings yet
- SeqP&D GPL Met enDocument52 pagesSeqP&D GPL Met enSriram ChNo ratings yet
- Experiment 08-A2dDocument3 pagesExperiment 08-A2dapi-277396867No ratings yet
- Fortinac: Juniper Ex Switch 802.1X-Mac-Authentication Device IntegrationDocument14 pagesFortinac: Juniper Ex Switch 802.1X-Mac-Authentication Device IntegrationSaid bel haj letaiefNo ratings yet
- Angle DesignDocument245 pagesAngle DesignGian CarloNo ratings yet
- New ScriptDocument2 pagesNew ScriptDeveloper 4No ratings yet
- Estimation of Microbial GrowthDocument25 pagesEstimation of Microbial GrowthziaiitdNo ratings yet
- CN101A Timer ManualDocument2 pagesCN101A Timer ManualMauricioVilalvaJr.0% (1)
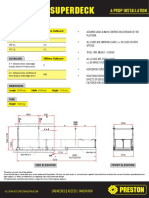
- SuperDeck All ModelsDocument12 pagesSuperDeck All Modelsarthur chungNo ratings yet
- How Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorDocument4 pagesHow Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorLucien GbezeNo ratings yet
- Reading Report Student's Name: Leonel Lipa Cusi Teacher's Name: Maria Del Pilar, Quintana EspinalDocument2 pagesReading Report Student's Name: Leonel Lipa Cusi Teacher's Name: Maria Del Pilar, Quintana EspinalleonellipaNo ratings yet