You might also like
- Medha Servo Drives, Written Exam Pattern Given by Tejaswi Bhavana (SVECW-2005-09-ECE)Document2 pagesMedha Servo Drives, Written Exam Pattern Given by Tejaswi Bhavana (SVECW-2005-09-ECE)Vinay SANAPALA88% (8)
- MTI Radar Principle and TypesDocument16 pagesMTI Radar Principle and TypesGopala Krishna MazundarNo ratings yet
- Vlsi TestingDocument51 pagesVlsi Testingkashi vissuNo ratings yet
- MPhasis Aptitude Questions SolvedDocument23 pagesMPhasis Aptitude Questions Solvedcontent writersNo ratings yet
- Questions and AnswersDocument199 pagesQuestions and AnswersRamesh100% (4)
- VLSI Design Module 1 IntroductionDocument119 pagesVLSI Design Module 1 IntroductionPhanindra Reddy100% (2)
- The output of the given code for the input 16 would be:124816So the factors of 16 are: 1, 2, 4, 8, 16Document80 pagesThe output of the given code for the input 16 would be:124816So the factors of 16 are: 1, 2, 4, 8, 16VEERA MANIKANTA80% (5)
- Visteon PaperDocument23 pagesVisteon Paperramanareddygv100% (1)
- Microprocessor Lab Viva Questions & AnswersDocument11 pagesMicroprocessor Lab Viva Questions & AnswersOishika C.100% (1)
- Microwave Engineering - M. KulkarniDocument81 pagesMicrowave Engineering - M. Kulkarnirjkmehta75% (4)
- Unit-I Introduction To Cellular Mobile Communications Limitations of Conventional Mobile Telephone SystemsDocument33 pagesUnit-I Introduction To Cellular Mobile Communications Limitations of Conventional Mobile Telephone SystemsJeevan Sai Maddi100% (1)
- EX - NO:1 Write A Code Simulating ARP /RARP Protocols: Aim: Algorithm: ServerDocument25 pagesEX - NO:1 Write A Code Simulating ARP /RARP Protocols: Aim: Algorithm: ServerSuba Sri100% (1)
- Microprocessor & Microcontroller Objective Type QuestionsDocument2 pagesMicroprocessor & Microcontroller Objective Type Questionsgokulchandru100% (2)
- AssignmentsDocument5 pagesAssignments20EEE24 Balaji kanna MNo ratings yet
- Arduino Based Vehicle Accident and Alert System Using GPS, GSM and AccelerometerDocument13 pagesArduino Based Vehicle Accident and Alert System Using GPS, GSM and AccelerometerDipika Singhaniya100% (2)
- Interview Questions-Data PatternsDocument2 pagesInterview Questions-Data Patternssarav dNo ratings yet
- ONLINE SEARCH AGENTS EXAMINEDDocument13 pagesONLINE SEARCH AGENTS EXAMINEDHari Deivasigamani100% (1)
- Cellular and Mobile CommunicationsDocument6 pagesCellular and Mobile CommunicationsSudeepSah100% (2)
- Linear Integrated Circuits 70 Interview Questions and Solutions 2 - DivyumDocument14 pagesLinear Integrated Circuits 70 Interview Questions and Solutions 2 - Divyumbalu56kvNo ratings yet
- Detection CriteriaDocument22 pagesDetection CriteriaGajula SureshNo ratings yet
- Viva Voce Questions On Communication SystemsDocument3 pagesViva Voce Questions On Communication SystemsZealWolf100% (3)
- UNIT 4 - Switched CapacitanceDocument75 pagesUNIT 4 - Switched Capacitancerajasekarkpr100% (1)
- Unit-5 - Detection of Radar Signals in NoiseDocument39 pagesUnit-5 - Detection of Radar Signals in NoiseMani PrinceNo ratings yet
- Frequency Management and Channel Assignment: Unit - 6Document39 pagesFrequency Management and Channel Assignment: Unit - 6nitinsinghsimps100% (1)
- If The Switch S1 Is Closed and Switch S2 Remains Open, What Lights Will Turn On?Document7 pagesIf The Switch S1 Is Closed and Switch S2 Remains Open, What Lights Will Turn On?Vel Murugan100% (1)
- Implementation of Simple Stack Allocation SchemeDocument4 pagesImplementation of Simple Stack Allocation SchemeSamyak VarshneyNo ratings yet
- Wipro Training ProgramDocument1 pageWipro Training Program0649No ratings yet
- Tree Search Using MPI With Static and Dynamic Partitioning PDFDocument9 pagesTree Search Using MPI With Static and Dynamic Partitioning PDFTest UbuntuNo ratings yet
- 16 Bit Multiplication 8051Document4 pages16 Bit Multiplication 8051Uday A Korat100% (5)
- LabVIEW Project Report Complete HPK Kumar DetailedDocument62 pagesLabVIEW Project Report Complete HPK Kumar DetailedDanny Vu75% (4)
- Course Exit Survey EE3071Document2 pagesCourse Exit Survey EE3071Bharath PulavarthiNo ratings yet
- Advanced Communication Lab Manual - 15ECL76Document89 pagesAdvanced Communication Lab Manual - 15ECL76Surendra K V62% (13)
- Important Topics For Placements - Core ElectronicsDocument6 pagesImportant Topics For Placements - Core ElectronicsSandeep VermaNo ratings yet
- Seminar Report On Satellite CommunicationDocument17 pagesSeminar Report On Satellite CommunicationHapi ER67% (6)
- Analog and Digital ComponentsDocument30 pagesAnalog and Digital ComponentsRajesh Kone100% (2)
- Linear Integrated Circuits Lab Viva VoceDocument8 pagesLinear Integrated Circuits Lab Viva Voceselvi0412100% (12)
- Important Question and Answers On Reflex KlystronDocument2 pagesImportant Question and Answers On Reflex KlystronAtanuGoraiNo ratings yet
- Model Viva Questions For "Analog Electronics"Document24 pagesModel Viva Questions For "Analog Electronics"profmns100% (1)
- Library Management System ReportDocument23 pagesLibrary Management System ReportUdupiSri groupNo ratings yet
- DCN Viva QuestionsDocument14 pagesDCN Viva QuestionsSerena VascoNo ratings yet
- MPMC Lab Manual - For 20-21 - FinalDocument34 pagesMPMC Lab Manual - For 20-21 - Finalchandra kiran100% (1)
- SCR NumericalDocument34 pagesSCR NumericalDevashishGuptaNo ratings yet
- Low Power VLSI Circuits QuestionsDocument31 pagesLow Power VLSI Circuits QuestionsPallavi Ch71% (7)
- Question With Answer MP & MCDocument13 pagesQuestion With Answer MP & MCMATHANKUMAR.SNo ratings yet
- Satellite Communication Lab Manual EC-7003: Department of Electronics & Communication EngineeringDocument20 pagesSatellite Communication Lab Manual EC-7003: Department of Electronics & Communication EngineeringMayank Kumar100% (1)
- Assignment 2 (SPOS) EditedDocument12 pagesAssignment 2 (SPOS) EditedOmkar Thange100% (1)
- PN Sequence GeneratorDocument7 pagesPN Sequence GeneratorTanvir Manhotra0% (1)
- DSP Important Viva QuestionsDocument3 pagesDSP Important Viva QuestionsDeepak Sahu100% (2)
- Directives of 8051Document8 pagesDirectives of 8051Piyush chaudhariNo ratings yet
- Question Bank Solutions (Module-2-IAT 1) - IOT - 15CS81Document12 pagesQuestion Bank Solutions (Module-2-IAT 1) - IOT - 15CS81Shobhit Kushwaha100% (1)
- Computer Networks Lab Viva QuestionsDocument22 pagesComputer Networks Lab Viva Questionssiva kumaar0% (1)
- How Gps WorksDocument20 pagesHow Gps WorksMustaf MohamedNo ratings yet
- GPS Systems ExplainedDocument4 pagesGPS Systems ExplainedMMhammed AlrowailyNo ratings yet
- GPS Receiver: How it Works & ApplicationsDocument17 pagesGPS Receiver: How it Works & Applicationsmanjeet kumarNo ratings yet
- Lecture - 3 - Working Principle of GPSDocument67 pagesLecture - 3 - Working Principle of GPSdiptosarkarNo ratings yet
- Introduction To Global Positioning SystemDocument31 pagesIntroduction To Global Positioning Systemdanyar.233698No ratings yet
- Unit 2 - GNSSDocument33 pagesUnit 2 - GNSSThe SinghNo ratings yet
- GPS Triangulation ProcedureDocument43 pagesGPS Triangulation Procedurehim92No ratings yet
- Lecture 5 GPSDocument16 pagesLecture 5 GPSShahab UddinNo ratings yet
- 10 - GpsDocument19 pages10 - GpsghadasalahNo ratings yet
- Summation CTDocument13 pagesSummation CTjakes87100% (1)
- Piano Recorded-Exam-Requirements-DiplomasDocument14 pagesPiano Recorded-Exam-Requirements-DiplomasJhi HiNo ratings yet
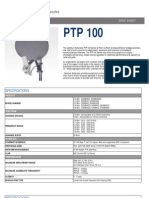
- Cambium Networks PTP 100 SpecificationDocument2 pagesCambium Networks PTP 100 SpecificationMuliawan HenochNo ratings yet
- Watchmen Episode 9Document44 pagesWatchmen Episode 9Chauncey OfThe HerosJourneyNo ratings yet
- World Link 3 Tapescripts SummaryDocument15 pagesWorld Link 3 Tapescripts SummaryYoussef MahsounNo ratings yet
- Electronics Parts Catalog and Electronics Maintenance Manual PDFDocument505 pagesElectronics Parts Catalog and Electronics Maintenance Manual PDFmglemNo ratings yet
- Radha LyricsDocument8 pagesRadha LyricsMuhammad Ramadhan Al - UesNo ratings yet
- Naiman Sharag The Eight Chestnut HorsesDocument2 pagesNaiman Sharag The Eight Chestnut HorsesJonas MondalaNo ratings yet
- Communication and Alarm SystemDocument30 pagesCommunication and Alarm SystemwendelNo ratings yet
- Tyco Connect PDFDocument148 pagesTyco Connect PDFArvind NangareNo ratings yet
- Land Mobile Radio SystemsDocument28 pagesLand Mobile Radio SystemsAbdulrahnman ItaniNo ratings yet
- Modulo FRSky FutabaFM para 2 4Document2 pagesModulo FRSky FutabaFM para 2 4AltemarFernandesdeOliveiraNo ratings yet
- Deh-X9550bt Deh-X9550sd Operating Manual Eng-Esp-PorDocument156 pagesDeh-X9550bt Deh-X9550sd Operating Manual Eng-Esp-PorBernabe AcostaNo ratings yet
- At CmndsDocument107 pagesAt CmndsNaveen VengaldasNo ratings yet
- She Is Always A Woman To Me - Billy Joel - Cifra ClubDocument1 pageShe Is Always A Woman To Me - Billy Joel - Cifra ClubhermerocalaNo ratings yet
- Jeru The Damaja Featuring Miz Marvel - 99.9 Percent-Webrip-x264-2010-CeasPDocument1 pageJeru The Damaja Featuring Miz Marvel - 99.9 Percent-Webrip-x264-2010-CeasPceaspNo ratings yet
- MOP for Airspan SC eNB alarm TroubleshootingDocument26 pagesMOP for Airspan SC eNB alarm TroubleshootingRamanuj SinghNo ratings yet
- IMSLP375618-PMLP606182-Ring, Ring - Full ScoreDocument8 pagesIMSLP375618-PMLP606182-Ring, Ring - Full ScoreerlingdevoldNo ratings yet
- Arthur Berger Explores Television GenresDocument11 pagesArthur Berger Explores Television GenresChike NgwuNo ratings yet
- Department of Education: Self-Assessment Activity Sheet Physical Education and Health 11Document4 pagesDepartment of Education: Self-Assessment Activity Sheet Physical Education and Health 11Jhon Vincent GaytaNo ratings yet
- Another Interview With Olivier Assayas - Reverse ShotDocument6 pagesAnother Interview With Olivier Assayas - Reverse ShotDulce AguirreNo ratings yet
- Star Bits - Corey DundeeDocument8 pagesStar Bits - Corey DundeeBrandon HildebrantNo ratings yet
- Violin VirtuosiDocument10 pagesViolin VirtuosiIMOMTom100% (8)
- sc120 PDFDocument116 pagessc120 PDFefremofeNo ratings yet
- PAPER Radio Ware Absorber PDFDocument8 pagesPAPER Radio Ware Absorber PDFjaimeNo ratings yet
- Oscillators Lab ReportDocument5 pagesOscillators Lab ReportYoong Jia Wee0% (1)
- Tutorial Agilent Antenna Tester N9330BDocument7 pagesTutorial Agilent Antenna Tester N9330BFranklin Manolo NiveloNo ratings yet
- On Praise of ShakespeareDocument8 pagesOn Praise of ShakespeareRhomirNo ratings yet
- The Musical System of ArchytasDocument23 pagesThe Musical System of ArchytasHilario Mireles100% (1)
- Music Retrieval and Recommendation: A Tutorial OverviewDocument4 pagesMusic Retrieval and Recommendation: A Tutorial OverviewJônatas CastroNo ratings yet