You might also like
- Phoenix Key Press Cheat Sheet GuideDocument3 pagesPhoenix Key Press Cheat Sheet GuideLalit MangalNo ratings yet
- Project Tour Guide IndiaDocument13 pagesProject Tour Guide IndiaLalit MangalNo ratings yet
- Rules of The RoadDocument17 pagesRules of The Roadupandown203No ratings yet
- SATURN-STOTRA Dashrath Brahmand Puran 0Document2 pagesSATURN-STOTRA Dashrath Brahmand Puran 0viky24No ratings yet
- GRE High Frequency WordsDocument2 pagesGRE High Frequency WordsFarhad HossainNo ratings yet
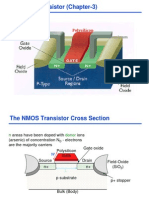
- Very GooodMOSFETDocument61 pagesVery GooodMOSFETlkmangalNo ratings yet
- 240Document6 pages240Lalit MangalNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Samsung Ue78ju7500t Chassis Uwj50 Uhd-Tv PDFDocument120 pagesSamsung Ue78ju7500t Chassis Uwj50 Uhd-Tv PDFautreraNo ratings yet
- Sensor TermoparDocument17 pagesSensor TermoparJose Trinidad Rodriguez QuirozNo ratings yet
- Ex2100e GE PDFDocument118 pagesEx2100e GE PDFFerio Arsyad100% (1)
- How To Perform A Noise Simulation in Cadence - EDA WikiDocument9 pagesHow To Perform A Noise Simulation in Cadence - EDA WikiandroidNo ratings yet
- Electrical Properties of Kevlar-Carbon Fiber Epoxy CompositesDocument7 pagesElectrical Properties of Kevlar-Carbon Fiber Epoxy CompositesJorge RomeroNo ratings yet
- A1205 Datasheet PDFDocument14 pagesA1205 Datasheet PDFAlekso GjakovskiNo ratings yet
- Vestel 11ak37 Chassis TV PDFDocument44 pagesVestel 11ak37 Chassis TV PDFbarber1No ratings yet
- Automatic Railway Gate ControllerDocument32 pagesAutomatic Railway Gate ControllerKaos Polos NakiraNo ratings yet
- 6.6kV switchgear layout and operationDocument16 pages6.6kV switchgear layout and operationraghavendran raghuNo ratings yet
- TTP223 Capacitive Touch Sensor ModuleDocument4 pagesTTP223 Capacitive Touch Sensor ModuleSarah Joy ManimtimNo ratings yet
- Isousb211 (Texas Instruments)Document40 pagesIsousb211 (Texas Instruments)Name SurnameNo ratings yet
- Literature ReviewDocument36 pagesLiterature Reviewprakush_prakush0% (1)
- Contents ListDocument27 pagesContents ListBandaru Lakshmi RaoNo ratings yet
- Bosch Semiconductors and Sensors 2011Document36 pagesBosch Semiconductors and Sensors 2011Mircea Gilca100% (1)
- Robotics With RobotCDocument6 pagesRobotics With RobotCM Madan GopalNo ratings yet
- Argus 7Document4 pagesArgus 7prabhakaran_hdecNo ratings yet
- Antenna FundamentalsDocument54 pagesAntenna FundamentalsMahmoudYasienMashhourNo ratings yet
- LG 32LF630V 32LF630V-ZA Series Service ManualDocument97 pagesLG 32LF630V 32LF630V-ZA Series Service Manualzepus89% (9)
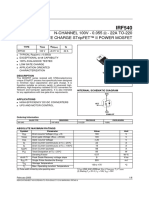
- N-CHANNEL 100V - 0.055 - 22A TO-220 Low Gate Charge Stripfet™ Ii Power MosfetDocument8 pagesN-CHANNEL 100V - 0.055 - 22A TO-220 Low Gate Charge Stripfet™ Ii Power MosfetCode Main ProjectNo ratings yet
- Seimens Alternator SpecDocument6 pagesSeimens Alternator SpecAdeelNo ratings yet
- Panasonic Sa Vkx80ga, Sa Vkx80gc, Sa Vkx80gsDocument164 pagesPanasonic Sa Vkx80ga, Sa Vkx80gc, Sa Vkx80gsboroda2410100% (1)
- Company ProfileDocument30 pagesCompany ProfileYugendra RNo ratings yet
- System On Chips Soc'S & Multiprocessor System On Chips MpsocsDocument42 pagesSystem On Chips Soc'S & Multiprocessor System On Chips MpsocsAli AhmadNo ratings yet
- CO#1 Describe, Analyze, and Design of Basic BJT & NMOS Differential AmplifierDocument6 pagesCO#1 Describe, Analyze, and Design of Basic BJT & NMOS Differential AmplifierCJ CHNo ratings yet
- Cablemaster CM - Remote Control Programing GuideDocument2 pagesCablemaster CM - Remote Control Programing GuideGlendinning Products, LLC.No ratings yet
- TVL12 IA EPAS q4 Mod1 Inspect Installed Devices Respond Lisnang Bgo v3Document15 pagesTVL12 IA EPAS q4 Mod1 Inspect Installed Devices Respond Lisnang Bgo v3Luis MendezNo ratings yet
- 9702 p1 Current Electricity AllDocument35 pages9702 p1 Current Electricity AllMCHNo ratings yet
- 3 Sensors and TransducersDocument99 pages3 Sensors and TransducersSon Athena100% (2)
- Introduction To Nanotechnology: 1.1 Nanotechnology - Definition and ExamplesDocument15 pagesIntroduction To Nanotechnology: 1.1 Nanotechnology - Definition and ExamplesMustafaNo ratings yet
- L7 Voltage Regulator, Half Wave Rectifier S2 1617Document20 pagesL7 Voltage Regulator, Half Wave Rectifier S2 1617Bhagyalaxmi patilNo ratings yet