You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2015-04-21 - 3 - LPE Firemans SyllabusDocument9 pages2015-04-21 - 3 - LPE Firemans SyllabusSumanNo ratings yet
- Solving The Simandoux EquationDocument15 pagesSolving The Simandoux Equationjose_rarmenta100% (1)
- Pivot Interactives Motion Graphing A Dry Ice Puck On A RampDocument2 pagesPivot Interactives Motion Graphing A Dry Ice Puck On A RampSophia0% (1)
- Compressive Strength of Hydraulic Cement Mortars (Using 2-In. or (50-mm) Cube Specimens)Document9 pagesCompressive Strength of Hydraulic Cement Mortars (Using 2-In. or (50-mm) Cube Specimens)Jesús Luis Arce GuillermoNo ratings yet
- Steam Engineering Principles and Heat TransferDocument99 pagesSteam Engineering Principles and Heat Transferalex mobileNo ratings yet
- 2oo3plus - A New Design of Electro-Hydraulic Safety Controls For Critical ApplicationsDocument6 pages2oo3plus - A New Design of Electro-Hydraulic Safety Controls For Critical Applicationsultrasonic81No ratings yet
- Methods of Re-Apportioning Service Cost Centre CostsDocument7 pagesMethods of Re-Apportioning Service Cost Centre CostsUserNo ratings yet
- April 2015-Vacuum Drying Chem Eng PDFDocument9 pagesApril 2015-Vacuum Drying Chem Eng PDFAlvaro BarbozaNo ratings yet
- Strength of Materials 4th Ed by Ferdinand L Singer Andrew Pytel Www07MettkDocument287 pagesStrength of Materials 4th Ed by Ferdinand L Singer Andrew Pytel Www07Mettkluis morales100% (2)
- The Mode of Eruptions and Their Tephra Deposits: Tetsuo K and Mitsuru ODocument8 pagesThe Mode of Eruptions and Their Tephra Deposits: Tetsuo K and Mitsuru OAnggit Tri AtmajaNo ratings yet
- Java Meets Numerical AnalysisDocument2 pagesJava Meets Numerical AnalysisbernasekNo ratings yet
- XI Maths - I Terminal ExamDocument2 pagesXI Maths - I Terminal ExamPurisai Rajamani KumarNo ratings yet
- HW2 Solutions FinalDocument5 pagesHW2 Solutions Finalpande_100No ratings yet
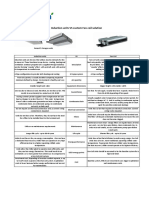
- HotelSolution: Induction Units VS Fan-Coil SolutionDocument1 pageHotelSolution: Induction Units VS Fan-Coil SolutionMoriyasu NguyenNo ratings yet
- Marsh FunnelDocument2 pagesMarsh Funnel123shripadNo ratings yet
- DWC ElecConduit Is 16205 P24 2018Document11 pagesDWC ElecConduit Is 16205 P24 2018Vamsi Manoj60% (5)
- 2130606Document24 pages2130606srinivasan venkatramanNo ratings yet
- Numerical Exploration of The Dang Van High Cycle FDocument18 pagesNumerical Exploration of The Dang Van High Cycle FHsan HaddarNo ratings yet
- Alpha 900 and HD LineDocument32 pagesAlpha 900 and HD Linebertan dağıstanlıNo ratings yet
- FDG Production-Theory Operations-FDG Synthesis Chemistr1Document25 pagesFDG Production-Theory Operations-FDG Synthesis Chemistr1Cesar Adolfo SanchezNo ratings yet
- Signature RedactedDocument49 pagesSignature RedactedG Pavan KumarNo ratings yet
- Activated Carbon From Cherry StonesDocument6 pagesActivated Carbon From Cherry StonesQussay AhmedNo ratings yet
- Lilin Downhole MotorDocument35 pagesLilin Downhole MotorIAN.SEMUT100% (2)
- Vector CalculusDocument62 pagesVector CalculuswaleedNo ratings yet
- Transmision de Potencia NewDocument12 pagesTransmision de Potencia NewGustavo ArmellaNo ratings yet
- Design of Masonry StructuresDocument10 pagesDesign of Masonry StructuresmuhammedNo ratings yet
- DMCR Detection Measurement Control RelayDocument5 pagesDMCR Detection Measurement Control RelayMuhammad AbuzarNo ratings yet
- Laws of Motion All DerivationsDocument13 pagesLaws of Motion All DerivationsYashwanthiNo ratings yet
- Francis Bacon, Logic of SensationDocument2 pagesFrancis Bacon, Logic of SensationShrankhla NaryaNo ratings yet