You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 414 Edd 9 BDocument30 pages414 Edd 9 Bapi-127299018No ratings yet
- Geometry Worksheet: For Questions 1-2, Use The Following DiagramDocument7 pagesGeometry Worksheet: For Questions 1-2, Use The Following Diagramapi-127299018No ratings yet
- Evaluation Notes Were Added To The Output Document. To Get Rid of These Notes, Please Order Your Copy of Eprint 5.0 NowDocument3 pagesEvaluation Notes Were Added To The Output Document. To Get Rid of These Notes, Please Order Your Copy of Eprint 5.0 Nowapi-127299018No ratings yet
- 2 A 724 D 02Document18 pages2 A 724 D 02api-127299018No ratings yet
- The American PageantDocument4 pagesThe American Pageantapi-127299018No ratings yet
- 6.01 Final Exam Spring 2011: Name: SectionDocument27 pages6.01 Final Exam Spring 2011: Name: Sectionapi-127299018No ratings yet
- 6.01 Final Exam: Fall 2010: Name: SectionDocument25 pages6.01 Final Exam: Fall 2010: Name: Sectionapi-127299018No ratings yet
- 6.01 Midterm 1 Spring 2011: Name: SectionDocument21 pages6.01 Midterm 1 Spring 2011: Name: Sectionapi-127299018No ratings yet
- Practice Problems - Chapter 33 Alternating Current Circuits: Multiple ChoiceDocument4 pagesPractice Problems - Chapter 33 Alternating Current Circuits: Multiple Choiceapi-127299018No ratings yet
- 6.01 Final Exam: Fall 2010: Name: SectionDocument25 pages6.01 Final Exam: Fall 2010: Name: Sectionapi-127299018No ratings yet
- 6.01 Final Exam: Spring 2010: Name: SectionDocument28 pages6.01 Final Exam: Spring 2010: Name: Sectionapi-127299018No ratings yet
- 6.01 Final Exam: Fall 2009: AnswersDocument27 pages6.01 Final Exam: Fall 2009: Answersapi-127299018No ratings yet
- 6.01 Final Exam: Spring 2009: NameDocument24 pages6.01 Final Exam: Spring 2009: Nameapi-127299018No ratings yet
- 6.01 Final Exam: Spring 2009: NameDocument24 pages6.01 Final Exam: Spring 2009: Nameapi-127299018No ratings yet
- 6.01 Midterm 1 Spring 2011: Name: SectionDocument21 pages6.01 Midterm 1 Spring 2011: Name: Sectionapi-127299018No ratings yet
- 6.01 Midterm 1: Fall 2010: Name: SectionDocument14 pages6.01 Midterm 1: Fall 2010: Name: Sectionapi-127299018No ratings yet
- 6.01 Midterm 1: Fall 2010: SolutionsDocument14 pages6.01 Midterm 1: Fall 2010: Solutionsapi-127299018No ratings yet
- 6.01 Midterm 1: Spring 2010: SolutionsDocument15 pages6.01 Midterm 1: Spring 2010: Solutionsapi-127299018No ratings yet
- 6.00 Quiz 3, Spring 2011 - NameDocument14 pages6.00 Quiz 3, Spring 2011 - Nameapi-127299018No ratings yet
- 6.01 Midterm 1: Fall 2009: Name: Solutions Section: Enter All Answers in The Boxes ProvidedDocument13 pages6.01 Midterm 1: Fall 2009: Name: Solutions Section: Enter All Answers in The Boxes Providedapi-127299018No ratings yet
- 6.00 Quiz 2, 2011 - NameDocument8 pages6.00 Quiz 2, 2011 - Nameapi-127299018No ratings yet
- 6.01 Midterm 1: Fall 2009: Name: Section: Enter All Answers in The Boxes ProvidedDocument13 pages6.01 Midterm 1: Fall 2009: Name: Section: Enter All Answers in The Boxes Providedapi-127299018No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Plant PDB-1Document4 pagesPlant PDB-1Viswa BhuvanNo ratings yet
- Epson Powerlite 76C SpecificationsDocument2 pagesEpson Powerlite 76C SpecificationsJorge RivasNo ratings yet
- Multi-Drop Data Bridge Over IP/MPLSDocument13 pagesMulti-Drop Data Bridge Over IP/MPLSBook LoverNo ratings yet
- 5Document16 pages5rahmat aidilNo ratings yet
- Módulo Bluethoo PDFDocument6 pagesMódulo Bluethoo PDFEduard SastoqueNo ratings yet
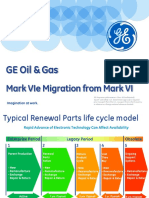
- Migration Kit MKVI To VIe - PresentationDocument5 pagesMigration Kit MKVI To VIe - Presentationzizu1234100% (1)
- High Voltage (HV) Outdoor Termination OHVT-145C (2B) : UP TO 145 KVDocument3 pagesHigh Voltage (HV) Outdoor Termination OHVT-145C (2B) : UP TO 145 KVAntonio GresiaNo ratings yet
- ILNAS-EN 61377:2016: Railway Applications - Rolling Stock - Combined Test Method For Traction SystemsDocument9 pagesILNAS-EN 61377:2016: Railway Applications - Rolling Stock - Combined Test Method For Traction SystemsPRAKASH SETHYNo ratings yet
- Easystart Select Operating Instructions 29-2100-20-1027Document12 pagesEasystart Select Operating Instructions 29-2100-20-1027Ferenc RózsaNo ratings yet
- Inductance of A 3 Phase Overhead Line With Equilateral SpacingDocument20 pagesInductance of A 3 Phase Overhead Line With Equilateral SpacingAp kowshikNo ratings yet
- Agilent Data-Acquisition TES-34970A DatasheetDocument28 pagesAgilent Data-Acquisition TES-34970A DatasheetTeq ShoNo ratings yet
- User Manual of SEMs in ERDocument102 pagesUser Manual of SEMs in ERrajuwithualwaysNo ratings yet
- Emergency StopDocument28 pagesEmergency StopipliprensNo ratings yet
- Scatalo Duo Station Datasheet A4Document2 pagesScatalo Duo Station Datasheet A4wmcNo ratings yet
- TCB TCB: 2AG53WRJDG01FM Beijing Fimi Technology LimitedDocument1 pageTCB TCB: 2AG53WRJDG01FM Beijing Fimi Technology LimitedEngenheiro Stefan ObermarkNo ratings yet
- Le360 Le361 Le362Document134 pagesLe360 Le361 Le362Fredrik HallinNo ratings yet
- C700 User ManualDocument77 pagesC700 User Manualdanh voNo ratings yet
- Cordless Drill Motor DesignDocument11 pagesCordless Drill Motor DesignstephenNo ratings yet
- Whatever Happen To The Ground Roll - AnsteyDocument6 pagesWhatever Happen To The Ground Roll - AnsteybangadesNo ratings yet
- Seatel Dac-2200 Operation PDFDocument76 pagesSeatel Dac-2200 Operation PDFIonut NeamtuNo ratings yet
- Electronic DesignDocument20 pagesElectronic DesignMilos PantelicNo ratings yet
- Sirona Orthophos XG Dental X-Ray - Maintenance Instructions PDFDocument58 pagesSirona Orthophos XG Dental X-Ray - Maintenance Instructions PDFomar kassarNo ratings yet
- Microprocessor 8085 - Two Mark QuestionsDocument23 pagesMicroprocessor 8085 - Two Mark Questionssaravanamoorthy81% (16)
- ATmega128 Application NotesDocument386 pagesATmega128 Application NotesArun P MadhavNo ratings yet
- Waves in Everyday LifeDocument3 pagesWaves in Everyday LifeL1ghtedNo ratings yet
- Coolfire II FV 610Document200 pagesCoolfire II FV 610Juan Manuel100% (2)
- Tda 7292Document22 pagesTda 7292pedro santosNo ratings yet
- Wicomm T QPSKDocument13 pagesWicomm T QPSKvithyaNo ratings yet
- E104-BT51A Datasheet EN v1.1Document47 pagesE104-BT51A Datasheet EN v1.1ivasi ivasiNo ratings yet
- Ohm Law & Circuit ExerciseDocument5 pagesOhm Law & Circuit ExerciseLEE MENG SAN LEE CHEOK CHUAN100% (2)