You might also like
- 02 FSSS Logic SystemDocument51 pages02 FSSS Logic SystemSam100% (3)
- Standard Quality Plan: Conforming To Code: Is 8183Document4 pagesStandard Quality Plan: Conforming To Code: Is 8183jagan100% (1)
- Thermal Power PlantDocument13 pagesThermal Power PlantSanat KumarNo ratings yet
- Boiler Drum Level Measurement and ControlDocument13 pagesBoiler Drum Level Measurement and ControlasdmoomNo ratings yet
- O & M Manual Ut-13000 - Dalmia DSP Unit-1Document62 pagesO & M Manual Ut-13000 - Dalmia DSP Unit-1ranjan shiveshNo ratings yet
- Dec 09Document35 pagesDec 09Krishnan SanthanarajNo ratings yet
- 2 HP WTR Hdr-Seal Trough FlushingDocument10 pages2 HP WTR Hdr-Seal Trough Flushingsekhar_ntpcNo ratings yet
- L-02 Hp-Ip Modeules Features 500mw Anp 3Document10 pagesL-02 Hp-Ip Modeules Features 500mw Anp 3SamNo ratings yet
- UntitledDocument8 pagesUntitledPMG Bhuswal ProjectNo ratings yet
- Ball Tube Mill DP Line Choking - A Case StudyDocument5 pagesBall Tube Mill DP Line Choking - A Case StudyParmeshwar Nath TripathiNo ratings yet
- Schematic Diagram of Sealing & Cooling Water For CepDocument12 pagesSchematic Diagram of Sealing & Cooling Water For Cepjp mishraNo ratings yet
- StartupDocument28 pagesStartupAjay Chauhan100% (1)
- Dokumen - Tips Coordinated Master Control in Thermal Power PlantDocument40 pagesDokumen - Tips Coordinated Master Control in Thermal Power Plant150819850No ratings yet
- Asld PresentDocument50 pagesAsld PresentAakanksha GahlautNo ratings yet
- Instrument Air Dryer and Instrument Air ReceiverDocument4 pagesInstrument Air Dryer and Instrument Air ReceiverAzizul HakimNo ratings yet
- 6.6 KV Switchgear Charging & IsolationDocument12 pages6.6 KV Switchgear Charging & IsolationSreekanthMylavarapuNo ratings yet
- Functional Write Up For Bed Lances 1-5 Rev00Document4 pagesFunctional Write Up For Bed Lances 1-5 Rev00krunalNo ratings yet
- Drum Level ControlDocument10 pagesDrum Level Controlgotosky12345678No ratings yet
- Secondary Air Damper ControlDocument3 pagesSecondary Air Damper ControlRajesh Kumar MohantyNo ratings yet
- TG Referal DatapediaDocument20 pagesTG Referal Datapediajp mishraNo ratings yet
- MM M02 2Document347 pagesMM M02 2SamuelTrinandoNo ratings yet
- SOP HP HeatersDocument1 pageSOP HP HeatersShailenderNo ratings yet
- APHDocument3 pagesAPHMallinatha PNNo ratings yet
- Nkeksnj ?KKVH Fuxe Cksdkjks Rki Fo - QR Dsunz: / Damodar Valley Corporation / Bokaro Thermal Power StationDocument7 pagesNkeksnj ?KKVH Fuxe Cksdkjks Rki Fo - QR Dsunz: / Damodar Valley Corporation / Bokaro Thermal Power StationAbhishek KumarNo ratings yet
- Korba - BAH Online Temp MonitoringDocument7 pagesKorba - BAH Online Temp Monitoringrama jenaNo ratings yet
- Signal Flow Diagram: Electronics Division, Bangalore - 26Document65 pagesSignal Flow Diagram: Electronics Division, Bangalore - 26Deepak GuptaNo ratings yet
- Stopping of One Pa FanDocument1 pageStopping of One Pa FanShift Incharge BrbclNo ratings yet
- Gland Steam Pressure For ReferenceDocument5 pagesGland Steam Pressure For ReferencebalajimechanicalNo ratings yet
- DC-AC Fail Work InstructionDocument23 pagesDC-AC Fail Work InstructionShiftinchargeengineer dadri coalNo ratings yet
- Forced Draft BlowerDocument108 pagesForced Draft BlowerTrevor ChandlerNo ratings yet
- Boiler Light Up ProcedureDocument14 pagesBoiler Light Up ProcedureGary Luna CuaquiraNo ratings yet
- Bhel - Trichy: Training Programme FOR Power Sector Executives ON CFBC BoilersDocument41 pagesBhel - Trichy: Training Programme FOR Power Sector Executives ON CFBC Boilersrashm006ranjanNo ratings yet
- Jindal Power Limited, Tamnar: JPL/OPN-250/SOP/.. 01/29.07.2019 00/00Document4 pagesJindal Power Limited, Tamnar: JPL/OPN-250/SOP/.. 01/29.07.2019 00/00Chandramani PatelNo ratings yet
- Condensate Water System-SKMDocument37 pagesCondensate Water System-SKMShubham VermaNo ratings yet
- Paper 6 FRF-lube Oil MixingDocument34 pagesPaper 6 FRF-lube Oil Mixinggolden430No ratings yet
- Technical Data For The Bhel 500 MW Steam TurbineDocument2 pagesTechnical Data For The Bhel 500 MW Steam Turbinesai ramanaNo ratings yet
- 2nd Control of BoilerDocument14 pages2nd Control of BoilerMuanifNo ratings yet
- DEH PresentationDocument37 pagesDEH PresentationPRAMOD KUMAR NANDANo ratings yet
- 893 Low Noise Solutions For Turbine Bypass To Air Cooled CondensersDocument10 pages893 Low Noise Solutions For Turbine Bypass To Air Cooled CondensersfelramNo ratings yet
- Reduction in Boiler Cooling TimeDocument16 pagesReduction in Boiler Cooling Timejp mishraNo ratings yet
- Slagging in Steam Generators: Root Cause AnalysisDocument8 pagesSlagging in Steam Generators: Root Cause AnalysispiyushagaNo ratings yet
- Condition Based Maintenance of Pumps PDFDocument22 pagesCondition Based Maintenance of Pumps PDFumair saleemNo ratings yet
- Condenser Vac PumpDocument20 pagesCondenser Vac PumpbarphaniNo ratings yet
- Difficulties FacedDocument6 pagesDifficulties FacedAnonymous pKsr5vNo ratings yet
- Deviation Settlement Mechanism (5th Amendment) : Presentation by EEMG-TSTPSDocument7 pagesDeviation Settlement Mechanism (5th Amendment) : Presentation by EEMG-TSTPSSuresh GantaNo ratings yet
- Protection & InterlocksDocument18 pagesProtection & InterlocksSanjay GuptaNo ratings yet
- Turbine Stress EvaluationDocument24 pagesTurbine Stress EvaluationBrahma Dutt100% (1)
- Bhelpswr - Co.in Technical FeedbackDocument7 pagesBhelpswr - Co.in Technical Feedbackradharaman_znaNo ratings yet
- Online Monitoring of Bottom Ash Hopper TemperatureDocument6 pagesOnline Monitoring of Bottom Ash Hopper Temperaturerama jenaNo ratings yet
- Damper System For Gas Turbine Exhaust Gas SystemDocument2 pagesDamper System For Gas Turbine Exhaust Gas Systemjkhan_724384No ratings yet
- Emergency Operations: Shaikh Feroz AliDocument15 pagesEmergency Operations: Shaikh Feroz AliEXECUTIVE ENGINEEER BOILER MAINTENANCENo ratings yet
- Ehc 500MWDocument26 pagesEhc 500MWRaja VigneshNo ratings yet
- PRE START VALVE LINE UP CHECK LISTcondensate SystemDocument3 pagesPRE START VALVE LINE UP CHECK LISTcondensate Systemmd abNo ratings yet
- FD FanDocument5 pagesFD FanPrudhvi RajNo ratings yet
- PDC Question BankDocument15 pagesPDC Question BankHardik PatoliyaNo ratings yet
- Feed Water Flow ControlDocument13 pagesFeed Water Flow ControlDwi Mulyanti Dwimulyantishop100% (1)
- HPBP Writeup Dadri-IIDocument17 pagesHPBP Writeup Dadri-IIrajan_me083No ratings yet
- BUSTION MANAGEMENT - BOILER DRUM - SIEMENS - AD353-105r3 PDFDocument5 pagesBUSTION MANAGEMENT - BOILER DRUM - SIEMENS - AD353-105r3 PDFGeorge MarkasNo ratings yet
- Drun Level ControlDocument12 pagesDrun Level ControlAshvani ShuklaNo ratings yet
- 3 Element ControlDocument5 pages3 Element Controlugun87No ratings yet
- Steam Turbine DesignDocument14 pagesSteam Turbine DesignFaiz de PorrasNo ratings yet
- Caesar - PowerpointDocument22 pagesCaesar - Powerpointgoal80No ratings yet
- Pipe Spacing CalculatorDocument9 pagesPipe Spacing CalculatorJuan Pablo ApazaNo ratings yet
- Seamless Tubes and Pipes For Power Plants OKDocument12 pagesSeamless Tubes and Pipes For Power Plants OKank_mehraNo ratings yet
- Pipe Spacing CalculatorDocument9 pagesPipe Spacing CalculatorJuan Pablo ApazaNo ratings yet
- Caesar - PowerpointDocument22 pagesCaesar - Powerpointgoal80No ratings yet
- Sgre20110400010 63804597Document7 pagesSgre20110400010 63804597ank_mehraNo ratings yet
- Pdms CommandsDocument6 pagesPdms CommandsMOHAMMAD ASIFNo ratings yet
- Pipeline Stress Analysis With Caesar IIDocument16 pagesPipeline Stress Analysis With Caesar IIank_mehraNo ratings yet
- Pipe Spacing CalculatorDocument9 pagesPipe Spacing CalculatorJuan Pablo ApazaNo ratings yet
- Access WaysDocument95 pagesAccess Waysreach_arindomNo ratings yet
- PVElite ManualDocument691 pagesPVElite Manuals.mladin75% (4)
- Air Calculation & Products of Combustion Calc.Document3 pagesAir Calculation & Products of Combustion Calc.ank_mehraNo ratings yet
- Strategies For Ash UtilizationDocument5 pagesStrategies For Ash UtilizationShweta MehtaNo ratings yet
- Theory, Applications and Sizing of Air ValvesDocument11 pagesTheory, Applications and Sizing of Air Valvesretrospect1000No ratings yet
- Safety Valve InstallationDocument14 pagesSafety Valve Installationank_mehraNo ratings yet
- Seamless Tubes and Pipes For Power Plants OKDocument12 pagesSeamless Tubes and Pipes For Power Plants OKank_mehraNo ratings yet
- Iron Iron Carbon DiagramDocument9 pagesIron Iron Carbon Diagramank_mehraNo ratings yet
- Air Calculation & Products of Combustion CalculationDocument3 pagesAir Calculation & Products of Combustion Calculationank_mehraNo ratings yet
- Fans & Blowers-Calculation of PowerDocument20 pagesFans & Blowers-Calculation of PowerPramod B.Wankhade92% (24)
- c2 Static Load Case EditorDocument22 pagesc2 Static Load Case Editorank_mehraNo ratings yet
- Pipeline Stress Analysis With Caesar IIDocument16 pagesPipeline Stress Analysis With Caesar IIank_mehra100% (1)
- Design Steps: Furnace of A Steam Generator: Selection of Geometric ParametersDocument21 pagesDesign Steps: Furnace of A Steam Generator: Selection of Geometric Parametersank_mehraNo ratings yet
- AnalysisDocument1 pageAnalysisank_mehraNo ratings yet
- Boiler Control SystemDocument84 pagesBoiler Control Systemank_mehraNo ratings yet
- Offset Alignment in Vertical Plane2Document1 pageOffset Alignment in Vertical Plane2ank_mehraNo ratings yet
- Thermel Power Plant ChemistryDocument161 pagesThermel Power Plant Chemistryank_mehra50% (2)
- Design Engineering Project ManagementDocument146 pagesDesign Engineering Project Managementank_mehra100% (2)
- 2.1 Fuels - CombustionDocument8 pages2.1 Fuels - Combustionank_mehraNo ratings yet
- Offset Alignment in Vertical PlaneDocument1 pageOffset Alignment in Vertical Planeank_mehraNo ratings yet
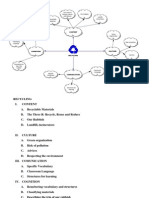
- Recycling Mind MapDocument2 pagesRecycling Mind Mapmsole124100% (1)
- Factors Affecting Physical FitnessDocument7 pagesFactors Affecting Physical FitnessMary Joy Escanillas Gallardo100% (2)
- Astm A194 2020Document12 pagesAstm A194 2020rolando cuadro blancoNo ratings yet
- Relationsh Between EM and Young S ModuliDocument7 pagesRelationsh Between EM and Young S ModuliDwight AndersonNo ratings yet
- QuantAssay Software Manual 11-Mar-2019Document51 pagesQuantAssay Software Manual 11-Mar-2019LykasNo ratings yet
- PAG7.1 Student The Effects of Antibiotics On Microbial Growth - v0.3Document3 pagesPAG7.1 Student The Effects of Antibiotics On Microbial Growth - v0.3Habib UddinNo ratings yet
- Leadership Games and ActivitiesDocument38 pagesLeadership Games and ActivitiesWilliam Oliss100% (1)
- 20160323014547-16MnCr5 - 16MnCrS5Document1 page20160323014547-16MnCr5 - 16MnCrS5Chaitanya DattaNo ratings yet
- BECO UACE Chem2Document6 pagesBECO UACE Chem2EMMANUEL BIRUNGINo ratings yet
- Sketchup-Rhino Cheat SheetDocument1 pageSketchup-Rhino Cheat Sheetxanext7No ratings yet
- #Dr. Lora Ecg PDFDocument53 pages#Dr. Lora Ecg PDFمحمد زينNo ratings yet
- Food Biotechnology in Ethical PerspectiveDocument340 pagesFood Biotechnology in Ethical Perspectivemojtaba2500100% (2)
- Pref - 2 - Grammar 1.2 - Revisión Del IntentoDocument2 pagesPref - 2 - Grammar 1.2 - Revisión Del IntentoJuan M. Suarez ArevaloNo ratings yet
- ST 36Document4 pagesST 36ray72roNo ratings yet
- Math 202 Syllabus-Spring18 PDFDocument2 pagesMath 202 Syllabus-Spring18 PDFvonacoc49No ratings yet
- Ecotopia Remixed II-FormattedDocument54 pagesEcotopia Remixed II-FormattedthisisdarrenNo ratings yet
- Electrical Design Project (Three Bedroom House)Document13 pagesElectrical Design Project (Three Bedroom House)Sufi Shah Hamid Jalali100% (2)
- Sudip Praposal - 1Document20 pagesSudip Praposal - 1Usha BbattaNo ratings yet
- Abnormalities of Placenta, Amniotic Fluid and Cord: Prepared By, B. Ezhilarasi, Nursing TutorDocument21 pagesAbnormalities of Placenta, Amniotic Fluid and Cord: Prepared By, B. Ezhilarasi, Nursing TutorGopala KrishnanNo ratings yet
- 3.1 - Sequences and SeriesxbxhhdDocument92 pages3.1 - Sequences and SeriesxbxhhdHelloNo ratings yet
- DS Ltch00601daa0 R05Document4 pagesDS Ltch00601daa0 R05rajareddy235No ratings yet
- Meet The Profesor 2021Document398 pagesMeet The Profesor 2021Raúl AssadNo ratings yet
- The Ieee Test System Methods: Reliability ofDocument11 pagesThe Ieee Test System Methods: Reliability ofFsdaSdsNo ratings yet
- Solid Modeling Techniques: Constructive Solid Geometry (CSG)Document22 pagesSolid Modeling Techniques: Constructive Solid Geometry (CSG)amolNo ratings yet
- Typical Section SC 10: Kerajaan MalaysiaDocument1 pageTypical Section SC 10: Kerajaan MalaysiaAisyah Atiqah KhalidNo ratings yet
- THE WEATHER LISTENING - Stalin GuañunaDocument1 pageTHE WEATHER LISTENING - Stalin GuañunaSTALIN JESUS GUA�UNA CHICAIZANo ratings yet
- Upaam 1135891 202105060749199700Document18 pagesUpaam 1135891 202105060749199700Kartik KapoorNo ratings yet
- Firestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsDocument77 pagesFirestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsRed JohnNo ratings yet
- Germania Agenturinfo enDocument4 pagesGermania Agenturinfo enДушан СтепановићNo ratings yet
- Propert 447-445Document11 pagesPropert 447-445LUNA100% (1)