You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Preface For The Power SystemsDocument16 pagesPreface For The Power SystemsSaket Tirpude20% (5)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Calibration of Thrmocouples: Assignment # 01Document3 pagesCalibration of Thrmocouples: Assignment # 01ahmadNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Principles of Lighting in A BuildingDocument21 pagesPrinciples of Lighting in A BuildingGaffur BoliyaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
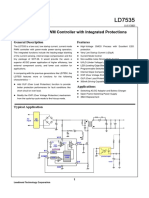
- Green-Mode PWM Controller With Integrated Protections: General Description FeaturesDocument18 pagesGreen-Mode PWM Controller With Integrated Protections: General Description FeaturesRUSLANNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Cisco Catalyst 6500 Series Switch DatasheetDocument12 pagesCisco Catalyst 6500 Series Switch DatasheetJoannaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 3SU11000AB401FA0 Datasheet enDocument4 pages3SU11000AB401FA0 Datasheet enpatrykk11195No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Design and Techno-Economical Optimization For Hybrid PV-wind System Under Various Meteorological ConditionsDocument20 pagesDesign and Techno-Economical Optimization For Hybrid PV-wind System Under Various Meteorological Conditionsjun005No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 8 DtekDocument5 pages8 DtekAlexander WieseNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Marsh Brown Clr-BrochureDocument4 pagesMarsh Brown Clr-BrochureأبوإسلامNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Aalim Muhammed Salegh College of Engineering Digital Systems Design Lab RecordDocument67 pagesAalim Muhammed Salegh College of Engineering Digital Systems Design Lab Recordaafreen sadakNo ratings yet
- 4.catalogue Mog-Cat-13-ExDocument11 pages4.catalogue Mog-Cat-13-ExNicolas GallegosNo ratings yet
- Resetting To The Delivery State: SIMATIC S7-300 CPU 31xC and CPU 31x: InstallationDocument2 pagesResetting To The Delivery State: SIMATIC S7-300 CPU 31xC and CPU 31x: InstallationHerry SusiloNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Ground Check Monitors For Underground Power SystemsDocument8 pagesGround Check Monitors For Underground Power SystemsjorgeayreNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- AC Circuits Knowledge Bank ExplainedDocument34 pagesAC Circuits Knowledge Bank ExplainedMalak SamirNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- SJ-20200929135033-015-ZXA10 C680&C600&C650&C620 (V1.2.1) Optical Access Aggregation Equipment Routine Maintenance - 996110Document44 pagesSJ-20200929135033-015-ZXA10 C680&C600&C650&C620 (V1.2.1) Optical Access Aggregation Equipment Routine Maintenance - 996110paulo gadelhaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Conectores CaterpillarDocument101 pagesConectores Caterpillarwilintonariza100% (7)
- Catalog Datacom Products Telebite 2006Document21 pagesCatalog Datacom Products Telebite 2006doddyNo ratings yet
- Focal 2019 Catalog Car-AudioDocument27 pagesFocal 2019 Catalog Car-AudioAntonio Perez PerezNo ratings yet
- M.tech CPLD & Fpga Architecture & ApplicationsDocument2 pagesM.tech CPLD & Fpga Architecture & Applicationssrinivas100% (1)
- THYSSEN (Maquina Mini Gearless DAF-270)Document76 pagesTHYSSEN (Maquina Mini Gearless DAF-270)migmarel86% (7)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Topraklama TestleriDocument25 pagesTopraklama TestleriZiya KartalNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Data Aire Brochure Web Version v4Document4 pagesData Aire Brochure Web Version v4dnps2011No ratings yet
- Buchholz Relay in Transformers (Working Principle) - Electrical4UDocument5 pagesBuchholz Relay in Transformers (Working Principle) - Electrical4UHarsh PatelNo ratings yet
- Addis Ababa University Addis Ababa Institute of TechnologyDocument56 pagesAddis Ababa University Addis Ababa Institute of TechnologyFìrœ Lōv MånNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Digital Logic Design Course Objectives and UnitsDocument2 pagesDigital Logic Design Course Objectives and UnitsRameshchandra K ECENo ratings yet
- Radio Design Live Products Combiners and TMAsDocument1 pageRadio Design Live Products Combiners and TMAsZiggy SmithNo ratings yet
- Test and Burn-In Sockets PDFDocument27 pagesTest and Burn-In Sockets PDFKSNo ratings yet
- Lecture5 Chapter2 - Positive and Negative LogicDocument11 pagesLecture5 Chapter2 - Positive and Negative LogicAyesha HussainNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)