You might also like
- A Combined Method For The Hydrodynamic CDocument13 pagesA Combined Method For The Hydrodynamic CTihomir MarkovicNo ratings yet
- Lee Son 2011 Optimal Shape Design of A Floating Body For Minimal Water Wave ForcesDocument11 pagesLee Son 2011 Optimal Shape Design of A Floating Body For Minimal Water Wave ForcesHineedNo ratings yet
- Research ArticleDocument27 pagesResearch ArticleSahil JawaNo ratings yet
- A Combined For Hydrodynamic Characteristics Planing CraftsDocument14 pagesA Combined For Hydrodynamic Characteristics Planing CraftsEnriqueNo ratings yet
- Asoe10016 20130930 082535 2982 38297 PDFDocument12 pagesAsoe10016 20130930 082535 2982 38297 PDFNoman KhanNo ratings yet
- jahanpour2016 بدونDocument33 pagesjahanpour2016 بدونkhaled AlaydiNo ratings yet
- Viscous Drag Calculations For Ship Hull Geometry: 1.0 AbstractDocument10 pagesViscous Drag Calculations For Ship Hull Geometry: 1.0 AbstractIsaac KocherlaNo ratings yet
- 09 Chapter 1Document21 pages09 Chapter 1reem.ranoom.moonNo ratings yet
- CFD Letters2Document20 pagesCFD Letters2Eswaran MuthaiahNo ratings yet
- A Numerical Investigation On Water Entry of Flat and Convex Flexible Wedges Considering The Hydro-Elastic Effects Using One-Way Coupling MethodDocument20 pagesA Numerical Investigation On Water Entry of Flat and Convex Flexible Wedges Considering The Hydro-Elastic Effects Using One-Way Coupling MethodfaheemNo ratings yet
- Dynamic Response Analysis of A Bulk Carrier by Nonlinear Hydroelastic MethodDocument13 pagesDynamic Response Analysis of A Bulk Carrier by Nonlinear Hydroelastic MethodAbhishekNo ratings yet
- An Integrated Tool For Concept and FinalDocument15 pagesAn Integrated Tool For Concept and FinaljasserjederNo ratings yet
- The Influence of Gravity On The Performance of Planing Vessels in Calm WaterDocument17 pagesThe Influence of Gravity On The Performance of Planing Vessels in Calm WaternaufragatoNo ratings yet
- Plastic Design of Laterally Patch Loaded Plates For ShipsDocument19 pagesPlastic Design of Laterally Patch Loaded Plates For ShipsKurt ZarwellNo ratings yet
- Numerical Investigation of Planing Hull Resistance Using Different Turbulence ModelsDocument11 pagesNumerical Investigation of Planing Hull Resistance Using Different Turbulence ModelsalsmoualNo ratings yet
- Finite Element Fatigue Analysis of Unsupported CraDocument9 pagesFinite Element Fatigue Analysis of Unsupported CraCarlos CarvNo ratings yet
- Computations For Large-Amplitude Two-Dimensional Body MotionsDocument13 pagesComputations For Large-Amplitude Two-Dimensional Body Motions张杰No ratings yet
- Hydodynamic Loads During The Deployment of ROVs - P.sayerDocument6 pagesHydodynamic Loads During The Deployment of ROVs - P.sayerDavid ThomsonNo ratings yet
- Finite Element Fatigue Analysis ofDocument9 pagesFinite Element Fatigue Analysis ofdevillasuNo ratings yet
- Green Sea ModellingDocument9 pagesGreen Sea ModellingJohn simpsonNo ratings yet
- Terziev Etal AOR 2019 A Geosim Analysis of Ship Resistance Decomposition and Scale EffectsDocument36 pagesTerziev Etal AOR 2019 A Geosim Analysis of Ship Resistance Decomposition and Scale EffectsMuhammad Osama SaeedNo ratings yet
- Estimation of Hydrodynamic Forces and Motion of Ships With Steady Forward SpeedDocument26 pagesEstimation of Hydrodynamic Forces and Motion of Ships With Steady Forward SpeedMir Tareque AliNo ratings yet
- Finite Element Techniques in Ship Structural DesignDocument33 pagesFinite Element Techniques in Ship Structural DesignRahim Can Peker100% (1)
- Estimation of Hull Girder Vertical Bending Moments Including Non Linear and RDocument14 pagesEstimation of Hull Girder Vertical Bending Moments Including Non Linear and RalfavectorNo ratings yet
- Jmse 08 00649Document23 pagesJmse 08 00649Ruchit PathakNo ratings yet
- Windloads On Offshore StructuresDocument16 pagesWindloads On Offshore StructureschbeggyNo ratings yet
- Jmse 08 00897 v3Document26 pagesJmse 08 00897 v3Renatto Yupa VillanuevaNo ratings yet
- Catamaran Wetdeck Slamming Loads Using CFDDocument6 pagesCatamaran Wetdeck Slamming Loads Using CFDAhmadA.SwidanNo ratings yet
- 2007 Katrine Wave-In-Deck Loading On Fixed Steel Jacket Decks1-S2.0-S0951833907000330-MainDocument21 pages2007 Katrine Wave-In-Deck Loading On Fixed Steel Jacket Decks1-S2.0-S0951833907000330-Mainklop disposableNo ratings yet
- The Influence of Gravity On The Performance of Planing Vessels in Calm WaterDocument17 pagesThe Influence of Gravity On The Performance of Planing Vessels in Calm WatermohammadfarsiNo ratings yet
- OMAE2006-92412: Whipping Response of Vessels With Large Amplitude MotionsDocument10 pagesOMAE2006-92412: Whipping Response of Vessels With Large Amplitude MotionsEnriqueGDNo ratings yet
- Numerical Investigation On The Effect of Trim On Ship Resistance by RANSE MethodDocument11 pagesNumerical Investigation On The Effect of Trim On Ship Resistance by RANSE Methodheinz billNo ratings yet
- A Review of Some Damage Tolerance Design ApproachesDocument45 pagesA Review of Some Damage Tolerance Design ApproachesrmdecaNo ratings yet
- M12 - Jurnal Prof Ming 2020Document16 pagesM12 - Jurnal Prof Ming 2020Mark SandyNo ratings yet
- Articulo de CFDDocument13 pagesArticulo de CFDPablo OrtegaNo ratings yet
- Amecrc PDFDocument17 pagesAmecrc PDFshimul2008No ratings yet
- EstimationIdentification of Hydrodynamic Coefficients in Ship Maneuvering Equations of Motion by Estimation-Before-Modeling Technique Before ModelingDocument26 pagesEstimationIdentification of Hydrodynamic Coefficients in Ship Maneuvering Equations of Motion by Estimation-Before-Modeling Technique Before ModelingmehdiNo ratings yet
- Evaluation of Resistance Increase and Speed Loss of A Ship in Wind and WavesDocument7 pagesEvaluation of Resistance Increase and Speed Loss of A Ship in Wind and WavesCarlos HernándezNo ratings yet
- Nonlinear Time Domain Simulation TechnologyDocument26 pagesNonlinear Time Domain Simulation TechnologyTahsin TezdoganNo ratings yet
- Quick Strip TheoryDocument11 pagesQuick Strip TheoryPopoo KyoNo ratings yet
- Ciba PMRes 2021 1Document6 pagesCiba PMRes 2021 1trongndNo ratings yet
- Numerical Analysis of Ship MotionDocument10 pagesNumerical Analysis of Ship MotionAbhiNo ratings yet
- Nutts 01 2010 Duisburg PDFDocument153 pagesNutts 01 2010 Duisburg PDFAnaa ChiroşcăNo ratings yet
- 3D Analysis For Conical Tanks Under Seismic Loads: Ahmed A.Rashed, Gamal H. Mahmoud, Nasr E. Nasr, Amgad A. TalaatDocument16 pages3D Analysis For Conical Tanks Under Seismic Loads: Ahmed A.Rashed, Gamal H. Mahmoud, Nasr E. Nasr, Amgad A. TalaatChime MornNo ratings yet
- Mesh ShipDocument7 pagesMesh ShipPranshu MalikNo ratings yet
- Brizzolara CFD Planing HullsV5 LibreDocument9 pagesBrizzolara CFD Planing HullsV5 LibrehiguelNo ratings yet
- Fully Coupled BEM-FEM Analysis For Ship Hydroelasticity in WavesDocument29 pagesFully Coupled BEM-FEM Analysis For Ship Hydroelasticity in WavesMarcelo De Oliveira PredesNo ratings yet
- Investigation of The Effect of Bulbous Bow - Paper For NOAMI - 15.01.2014Document16 pagesInvestigation of The Effect of Bulbous Bow - Paper For NOAMI - 15.01.2014mtarequeali5836No ratings yet
- 17-Bergsma FSI Paper RevisedDocument10 pages17-Bergsma FSI Paper RevisedSunil Kumar P GNo ratings yet
- Hydrodynamic Impact Numerical and Experimental InvestigationsDocument27 pagesHydrodynamic Impact Numerical and Experimental InvestigationsAdam LewisNo ratings yet
- Structural Design of A Semi-Submersible Platform With Water-Entrapment Plates Based On A Time-Domain Hydrodynamic Algorithm Coupled With Finite-ElementsDocument8 pagesStructural Design of A Semi-Submersible Platform With Water-Entrapment Plates Based On A Time-Domain Hydrodynamic Algorithm Coupled With Finite-Elementssaeed-21No ratings yet
- Chapter 2Document4 pagesChapter 2Israel DicksonNo ratings yet
- Fluctuating Wind and Wave Simulations and Its ApplDocument14 pagesFluctuating Wind and Wave Simulations and Its ApplClaudia Lemos RochaNo ratings yet
- Sloshing Article Final VersionDocument7 pagesSloshing Article Final VersionDanielGuimarãesCostaNo ratings yet
- 1 s2.0 S1001605811603119 MainDocument8 pages1 s2.0 S1001605811603119 MainMason SaidNo ratings yet
- CFD As A Seakeeping Tool For Ship Design: SNAK, 2011Document7 pagesCFD As A Seakeeping Tool For Ship Design: SNAK, 2011Sahil JawaNo ratings yet
- Semi-Submersible's Response Prediction by Diffraction Potential MethodeDocument8 pagesSemi-Submersible's Response Prediction by Diffraction Potential MethodePaul CLoonNo ratings yet
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 pagesPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesNo ratings yet
- $tsu. (:'T ": (: Uu TorDocument23 pages$tsu. (:'T ": (: Uu TorhaujesNo ratings yet
- Design and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004Document11 pagesDesign and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004haujesNo ratings yet
- Dynamic Analysis of Planing Hulls in The Vertical Plane - AkersDocument19 pagesDynamic Analysis of Planing Hulls in The Vertical Plane - AkershaujesNo ratings yet
- RANSE Simulations of Surface Piercing PropellersDocument5 pagesRANSE Simulations of Surface Piercing PropellershaujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- Wave Impact Reduction of Planing BoatsDocument14 pagesWave Impact Reduction of Planing BoatshaujesNo ratings yet
- NASP Origin and Cause, Appraisals On Boat Losses - Davis 2003Document21 pagesNASP Origin and Cause, Appraisals On Boat Losses - Davis 2003haujesNo ratings yet
- Estimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReportDocument2 pagesEstimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReporthaujesNo ratings yet
- Comments On Reliable Prediction Accuracy: A Hydrocomp Technical ReportDocument4 pagesComments On Reliable Prediction Accuracy: A Hydrocomp Technical ReporthaujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- How To Build An Optimist: How Hard Can It Be, There's Only Five Bits ofDocument4 pagesHow To Build An Optimist: How Hard Can It Be, There's Only Five Bits ofhaujes0% (1)
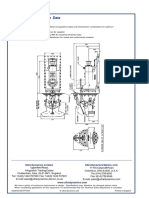
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNo ratings yet
- Preliminary Jet Size SelectionDocument3 pagesPreliminary Jet Size SelectionhaujesNo ratings yet
- Ultrajet 251 Features & Benefi Ts Description: Z Z Z Higher Inspection Cover To Z Z Z Z ZDocument2 pagesUltrajet 251 Features & Benefi Ts Description: Z Z Z Higher Inspection Cover To Z Z Z Z ZhaujesNo ratings yet
- DNV-RU-SHIP Pt.3 Ch.4-3Document97 pagesDNV-RU-SHIP Pt.3 Ch.4-3Tumul100% (1)
- 2 - Estimation of General Characteristics of Fishing Vessels ADocument16 pages2 - Estimation of General Characteristics of Fishing Vessels AJuan SilvaNo ratings yet
- FF-Series Fact SheetDocument2 pagesFF-Series Fact SheetJose DAniel Figueroa100% (1)
- MSM Lecture 03Document28 pagesMSM Lecture 03RafaelNo ratings yet
- Dual Actuator Mechanical InstallationDocument28 pagesDual Actuator Mechanical InstallationZhang801No ratings yet
- Report FinalDocument15 pagesReport FinalABDUL AZIM BIN ABDUL MUTTALIB A20EM0001No ratings yet
- Manoeuvre The ShipDocument37 pagesManoeuvre The ShipAldo Trinovachaesa100% (1)
- Tracer 1500tri: Preliminary Study PlansDocument20 pagesTracer 1500tri: Preliminary Study PlansSteffan MäckenNo ratings yet
- General Description of The ShipDocument24 pagesGeneral Description of The ShipAlexandra Haydee Vilchez Pinedo100% (1)
- Atkin J. Practical Small Boat Designs, 1983Document194 pagesAtkin J. Practical Small Boat Designs, 1983VitBar100% (4)
- U90M Part 3 E-July14Document248 pagesU90M Part 3 E-July14Daniel SuhayNo ratings yet
- FULLTEXT01Document51 pagesFULLTEXT01alex saficNo ratings yet
- University of Cebu Metc: Sto Competency 2 Assessment Questionnaires For Validation EngineDocument11 pagesUniversity of Cebu Metc: Sto Competency 2 Assessment Questionnaires For Validation EngineVilma TayumNo ratings yet
- The Design Ratios: A Naval Architect's Dozen (Or Thereabouts)Document55 pagesThe Design Ratios: A Naval Architect's Dozen (Or Thereabouts)shejtemaeiNo ratings yet
- Strength Analysis of Hull Structures in Container Ships - DNVDocument33 pagesStrength Analysis of Hull Structures in Container Ships - DNVrazeemshipNo ratings yet
- Design and Build Dinghy Manual 2020Document78 pagesDesign and Build Dinghy Manual 2020Joao Calinho100% (2)
- JMS SNAME Paper 2010-1Document10 pagesJMS SNAME Paper 2010-1hgmNo ratings yet
- MG5114Document2 pagesMG5114Alejandro MujicaNo ratings yet
- StabilityDocument8 pagesStabilitySalwan ShubhamNo ratings yet
- Main Parts of Ships PPT-libre PDFDocument9 pagesMain Parts of Ships PPT-libre PDFcarlos100% (2)
- Ship Project - Final PDFDocument230 pagesShip Project - Final PDFSamir Alshaar100% (3)
- (Vol VIII), 2006 Rules For Classification and Construction of WIG CRAFT, 2006Document179 pages(Vol VIII), 2006 Rules For Classification and Construction of WIG CRAFT, 2006Anonymous ma0HXq2iXNo ratings yet
- Manoeuvring Information On Board ShipsDocument13 pagesManoeuvring Information On Board ShipsvdevivNo ratings yet
- 561NR 2012-03Document54 pages561NR 2012-03Heather SullivanNo ratings yet
- S40-OD Checking List MeasurementDocument5 pagesS40-OD Checking List MeasurementSoto40ODNo ratings yet
- NACA ARR 3F12 Some Systematic Model Experiments On The Porpoising Characteristics of Flying-Boat HullsDocument74 pagesNACA ARR 3F12 Some Systematic Model Experiments On The Porpoising Characteristics of Flying-Boat HullsMark Evan SalutinNo ratings yet
- HydrodynamicDocument132 pagesHydrodynamicBecirspahic AlmirNo ratings yet
- Framing System: Frames, Deck Beams EtcDocument2 pagesFraming System: Frames, Deck Beams EtcMir Tareque AliNo ratings yet
- List of Crusing BoatsDocument61 pagesList of Crusing BoatsJim Kiesling100% (2)
- A2 GeniE Semisub PontoonDocument57 pagesA2 GeniE Semisub PontoonJorge HLNo ratings yet