You might also like
- The Parallel EM Algorithm and Its Applications in Computer VisionDocument8 pagesThe Parallel EM Algorithm and Its Applications in Computer VisionTinhVoNo ratings yet
- All Layer MEDocument21 pagesAll Layer MEparamkusamNo ratings yet
- Stereo Matching Algorithm Using Census Transform and Segment Tree For Depth EstimationDocument9 pagesStereo Matching Algorithm Using Census Transform and Segment Tree For Depth EstimationTELKOMNIKANo ratings yet
- Machine Learning With CaeDocument6 pagesMachine Learning With CaeHarsha KorlapatiNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document9 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Syndrome Decoding Estimator: Abstract. The Selection of Secure Parameter Sets Requires An EstimaDocument31 pagesSyndrome Decoding Estimator: Abstract. The Selection of Secure Parameter Sets Requires An EstimaindraNo ratings yet
- Overcoming Computational Errors in Sensing Platforms Through Embedded Machine-Learning KernelsDocument12 pagesOvercoming Computational Errors in Sensing Platforms Through Embedded Machine-Learning KernelsctorreshhNo ratings yet
- Beating C in Scientific Computing with LISP PerformanceDocument12 pagesBeating C in Scientific Computing with LISP PerformancecluxNo ratings yet
- Auckland Identification ToolboxDocument8 pagesAuckland Identification ToolboxMKNo ratings yet
- Computation-Aware Scheme For Software-Based Block Motion EstimationDocument13 pagesComputation-Aware Scheme For Software-Based Block Motion EstimationmanikandaprabumeNo ratings yet
- Design and Evaluation of Hybrid Fault-Detection SystemsDocument12 pagesDesign and Evaluation of Hybrid Fault-Detection SystemsAbdrazag MohNo ratings yet
- A Foss Motion Estimation AlgorithmDocument5 pagesA Foss Motion Estimation AlgorithmVijay VijitizerNo ratings yet
- QaecDocument70 pagesQaecReethika ChitithotiNo ratings yet
- Estimation of Software Defects Fix Effort Using Neural NetworksDocument2 pagesEstimation of Software Defects Fix Effort Using Neural NetworksSpeedSrlNo ratings yet
- Hauff ManDocument11 pagesHauff ManMohammad IsmailNo ratings yet
- Finales Ingles II (K)Document12 pagesFinales Ingles II (K)Martin MarottaNo ratings yet
- Term Paper On Embedded SystemsDocument7 pagesTerm Paper On Embedded Systemsaflsbbesq100% (1)
- Adaptive Lossless Image CodingDocument8 pagesAdaptive Lossless Image CodingPrangya BisoyiNo ratings yet
- English Speech Recognition System On Chip: LL LL LLDocument5 pagesEnglish Speech Recognition System On Chip: LL LL LLSudhakar SpartanNo ratings yet
- OPNET Modeler - Introduction LTE SimulationDocument16 pagesOPNET Modeler - Introduction LTE SimulationAnonymous TTVlXoNo ratings yet
- ImageDocument4 pagesImagehassan IQNo ratings yet
- Advanced Deep Learning MCC metricDocument6 pagesAdvanced Deep Learning MCC metricMorteza ShamsoddiniNo ratings yet
- Opengl-Performance and Bottlenecks: S A, P K SDocument15 pagesOpengl-Performance and Bottlenecks: S A, P K SmartinsergNo ratings yet
- Efficient Motion Estimation by Fast Threestep Search X8ir95p9y3Document6 pagesEfficient Motion Estimation by Fast Threestep Search X8ir95p9y3Naveen KumarNo ratings yet
- A System Bus Power: Systematic To AlgorithmsDocument12 pagesA System Bus Power: Systematic To AlgorithmsNandhini RamamurthyNo ratings yet
- Technological Institute of The Philippines: BER InstrumentationDocument10 pagesTechnological Institute of The Philippines: BER Instrumentationdjun033No ratings yet
- Bit-Error-Rate (BER) Simulation Using MATLABDocument6 pagesBit-Error-Rate (BER) Simulation Using MATLABstarman222No ratings yet
- Statistical Learning in Automated Troubleshooting: Application To LTE Interference MitigationDocument6 pagesStatistical Learning in Automated Troubleshooting: Application To LTE Interference MitigationyohnnisNo ratings yet
- Video Coding SchemeDocument12 pagesVideo Coding SchemezfzmkaNo ratings yet
- TDT4240 Exam 2014 SolutionDocument7 pagesTDT4240 Exam 2014 SolutionWajih ul hassanNo ratings yet
- Workpackage 4: Optimization: Distributed Modelling ApproachDocument4 pagesWorkpackage 4: Optimization: Distributed Modelling ApproachMelissa MillerNo ratings yet
- Optimum Coordination of Overcurrent Relays Using SADE AlgorithmDocument10 pagesOptimum Coordination of Overcurrent Relays Using SADE AlgorithmJamile_P_NNo ratings yet
- Chen - Fault Section Estimation Using Fuzzy Matrix-Based Reasoning Methods - 2011Document9 pagesChen - Fault Section Estimation Using Fuzzy Matrix-Based Reasoning Methods - 2011Aécio OliveiraNo ratings yet
- Performance PDFDocument109 pagesPerformance PDFRafa SoriaNo ratings yet
- An Algorithmic Approach To The OptimizatDocument22 pagesAn Algorithmic Approach To The OptimizatTodor GospodinovNo ratings yet
- Fast Block Direction Prediction For Directional TransformsDocument8 pagesFast Block Direction Prediction For Directional TransformsCyberJournals MultidisciplinaryNo ratings yet
- Stereo Video Processing For Depth Map: Harlan Hile and Colin ZhengDocument8 pagesStereo Video Processing For Depth Map: Harlan Hile and Colin Zhengajnabee4u18100% (2)
- Stock Price Forecasting by Hybrid Machine Learning TechniquesDocument6 pagesStock Price Forecasting by Hybrid Machine Learning Techniquess_murugan02No ratings yet
- Efficient Error Estimating Coding: Feasibility and ApplicationsDocument12 pagesEfficient Error Estimating Coding: Feasibility and ApplicationsFatima AhsanNo ratings yet
- (Notes) DESIGN FOR TESTABILITYDocument34 pages(Notes) DESIGN FOR TESTABILITYsarathkumarNo ratings yet
- CA Classes-226-230Document5 pagesCA Classes-226-230SrinivasaRaoNo ratings yet
- Weighting Techniques in Data Compression Theory and AlgoritmsDocument187 pagesWeighting Techniques in Data Compression Theory and AlgoritmsPhuong Minh NguyenNo ratings yet
- Electronic System-Level Synthesis MethodologiesDocument6 pagesElectronic System-Level Synthesis MethodologiesAdip ChyNo ratings yet
- The Simulation and Evaluation of Dynamic Voltage Scaling AlgorithmsDocument6 pagesThe Simulation and Evaluation of Dynamic Voltage Scaling AlgorithmsArmin AhmadzadehNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument7 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- jucs-29-8-892_article-94462Document19 pagesjucs-29-8-892_article-94462Mohamed EL GHAZOUANINo ratings yet
- Three Level Benchmarking of Singularity Containers For Scientific CalculationsDocument14 pagesThree Level Benchmarking of Singularity Containers For Scientific CalculationsPolgár PéterNo ratings yet
- A Framework For Programming Embedded Systems: Initial Design and ResultsDocument47 pagesA Framework For Programming Embedded Systems: Initial Design and ResultsBillow Kenny KucchinsNo ratings yet
- Generation of Test Cases For Object Oriented Software Using UML State Machine DiagramDocument7 pagesGeneration of Test Cases For Object Oriented Software Using UML State Machine Diagramgirish desaiNo ratings yet
- Automated Design Debugging With Maximum SatisfiabilityDocument14 pagesAutomated Design Debugging With Maximum SatisfiabilityVimala PriyaNo ratings yet
- On Using Game Theory To Optimize The Rate Control in Video CodingDocument11 pagesOn Using Game Theory To Optimize The Rate Control in Video Codingmario_cordinaNo ratings yet
- Ijcttjournal V1i2p9Document10 pagesIjcttjournal V1i2p9surendiran123No ratings yet
- Modified March C - Algorithm For Embedded Memory TestingDocument6 pagesModified March C - Algorithm For Embedded Memory TestingShrinivas SaptalakarNo ratings yet
- Efficient Use of Hybrid Adaptive Neuro-Fuzzy Inference System Combined With Nonlinear Dimension Reduction Method in Production ProcessesDocument15 pagesEfficient Use of Hybrid Adaptive Neuro-Fuzzy Inference System Combined With Nonlinear Dimension Reduction Method in Production ProcessesCS & ITNo ratings yet
- Algorithms For Data Compression in Wireless Computing SystemsDocument7 pagesAlgorithms For Data Compression in Wireless Computing Systemsnikhilvbhatt9591No ratings yet
- Efficient Clustering of Dataset Based On Particle Swarm OptimizationDocument10 pagesEfficient Clustering of Dataset Based On Particle Swarm OptimizationTJPRC PublicationsNo ratings yet
- Challenge Data DescriptionDocument3 pagesChallenge Data DescriptionRacha Khelif0% (1)
- ADAM-6000 User Manaul Ed 9Document252 pagesADAM-6000 User Manaul Ed 9fernandoviolante8551No ratings yet
- 5 Pen PC Technology PDFDocument8 pages5 Pen PC Technology PDFNikitha ReddyNo ratings yet
- Ds SSG 8 Baur En-GbDocument2 pagesDs SSG 8 Baur En-Gbrupesh kumarNo ratings yet
- JSS-296 - NCR-333 - Ton SART20 - Tron 40SDocument401 pagesJSS-296 - NCR-333 - Ton SART20 - Tron 40SBryan MilloNo ratings yet
- Smart Braille Reading and Writing Device Final Year ReportDocument50 pagesSmart Braille Reading and Writing Device Final Year Reportdaniel100% (2)
- Penta-Band Antenna with 5 Integrated RCUsDocument2 pagesPenta-Band Antenna with 5 Integrated RCUsApitan Kongcharoen100% (1)
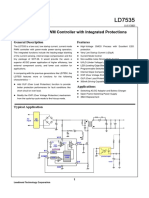
- Green-Mode PWM Controller With Integrated Protections: General Description FeaturesDocument18 pagesGreen-Mode PWM Controller With Integrated Protections: General Description FeaturesRUSLANNo ratings yet
- Altec Lansing ADA105Document7 pagesAltec Lansing ADA105Ciara Mae Waldron100% (1)
- SI1154U Starters and AlternatorsDocument10 pagesSI1154U Starters and AlternatorsNickNo ratings yet
- N TypeDocument3 pagesN TypeTayyaba ButtNo ratings yet
- E-Wallet: Paper Presentation OnDocument7 pagesE-Wallet: Paper Presentation OnSiddhartha Choudary100% (1)
- 2014 Winter Model Answer PaperDocument25 pages2014 Winter Model Answer Papernavneet100% (1)
- Double-impeller electric pumps technical data sheetDocument9 pagesDouble-impeller electric pumps technical data sheetNahuel AlthausNo ratings yet
- 05) 63a MCCB 10 Bran Panel (B-Dp-Pump)Document4 pages05) 63a MCCB 10 Bran Panel (B-Dp-Pump)consultnadeem70No ratings yet
- RRCS PricelistDocument63 pagesRRCS PricelistGarett MaloneNo ratings yet
- Jevi - Junction Boxes For Immersion Heaters - Technical Data SheetDocument2 pagesJevi - Junction Boxes For Immersion Heaters - Technical Data SheetHasibKaabiNo ratings yet
- Infineon Bts6133d Ds v01 00 enDocument17 pagesInfineon Bts6133d Ds v01 00 enmarino246No ratings yet
- M268 Guide en-USDocument6 pagesM268 Guide en-USwaynemercer000No ratings yet
- L Series - Operating Manual.0.8Document55 pagesL Series - Operating Manual.0.8PaMe LiTaNo ratings yet
- Recuperar Driver GhostDocument3 pagesRecuperar Driver GhostainhoazalaNo ratings yet
- AC Circuits Knowledge Bank ExplainedDocument34 pagesAC Circuits Knowledge Bank ExplainedMalak SamirNo ratings yet
- ED - Mid Lecture-10 - Part 2Document12 pagesED - Mid Lecture-10 - Part 2Pritam ChakrabortyNo ratings yet
- Fundamentals of Electrical Drives SystemsDocument14 pagesFundamentals of Electrical Drives SystemsyaredNo ratings yet
- THYSSEN (Maquina Mini Gearless DAF-270)Document76 pagesTHYSSEN (Maquina Mini Gearless DAF-270)migmarel86% (7)
- 487.4-2013 Standard For The Electrical Protection of Communication Facilities Serving Electric Supply Locations Through The Use of Neutralizing TransformersDocument55 pages487.4-2013 Standard For The Electrical Protection of Communication Facilities Serving Electric Supply Locations Through The Use of Neutralizing Transformersjose eduardo mejia sanchezNo ratings yet
- Satellite Communication Question PaperDocument2 pagesSatellite Communication Question PaperallanjwilsonNo ratings yet
- Pre Installation Lab Requirements: (For Arl XRF 9900 Intellipower Series Spectrometer - 1200W)Document3 pagesPre Installation Lab Requirements: (For Arl XRF 9900 Intellipower Series Spectrometer - 1200W)saji kumarNo ratings yet
- Ansaldo Electric Drives 15/30 kW Technical SpecsDocument4 pagesAnsaldo Electric Drives 15/30 kW Technical SpecsMr.K ch50% (2)
- DatasheetDocument56 pagesDatasheetrajkumarmalathiNo ratings yet
- DS1103Document6 pagesDS1103studysmNo ratings yet