You might also like
- R Series Manual PDFDocument111 pagesR Series Manual PDFMarco AlvaronNo ratings yet
- High-Speed ROLAND 700 HiPrint HS Offers 18,000 Sheets Per HourDocument4 pagesHigh-Speed ROLAND 700 HiPrint HS Offers 18,000 Sheets Per HourJavier Martinez Cañal100% (2)
- Film Processor Operation Manual: Protec Medizintechnik GMBH & Co. KGDocument46 pagesFilm Processor Operation Manual: Protec Medizintechnik GMBH & Co. KGEdward Pérez ArangurenNo ratings yet
- Operate Coating Supply MachineDocument26 pagesOperate Coating Supply MachineDeniMestiWidianto100% (1)
- SP 162 Cer Leaflet enDocument4 pagesSP 162 Cer Leaflet enDelibash WholucyNo ratings yet
- Color EditorDocument70 pagesColor EditorP LNo ratings yet
- HD 42Document11 pagesHD 42Resimasc GonzálezNo ratings yet
- L1 L2 L3 F1 F2 F3: Guards - Air Supply - LubricationDocument2 pagesL1 L2 L3 F1 F2 F3: Guards - Air Supply - LubricationAnonymous 2YS5Pg7UJNo ratings yet
- Train Ticket - Pune To TATADocument2 pagesTrain Ticket - Pune To TATAKESHAV RASAILYNo ratings yet
- Luxel f6000 User ManualDocument184 pagesLuxel f6000 User Manualmaskara80No ratings yet
- KBA-Rapida 75 I Part EnglDocument8 pagesKBA-Rapida 75 I Part EnglKBR Graphics CanadaNo ratings yet
- E2E05 Pos-Drives 01Document18 pagesE2E05 Pos-Drives 01Juan CaceresNo ratings yet
- Customer Course Catalog 2012 E PDFDocument10 pagesCustomer Course Catalog 2012 E PDFNildo TrindadeNo ratings yet
- Processor-Grafmac-maintain - 32+45+53CDN - 20080923A-KSDocument26 pagesProcessor-Grafmac-maintain - 32+45+53CDN - 20080923A-KSalejandro100% (1)
- DP2 Set ValueDocument4 pagesDP2 Set ValuevzpreleNo ratings yet
- DY3E Three-Phase Compound Step Motor Driver User ManualDocument20 pagesDY3E Three-Phase Compound Step Motor Driver User ManualZoran ŠiručkaNo ratings yet
- M7E05 SwingGripper 01Document18 pagesM7E05 SwingGripper 01Mamoon SartawiNo ratings yet
- E7E07 InkingDampeningUnit 01Document52 pagesE7E07 InkingDampeningUnit 01Froylan OchoaNo ratings yet
- Engineer'S Manual: Computer-Controlled Dry-Head, Lockstitch, Sleeve Setting Machine With Multi-Programming DeviceDocument124 pagesEngineer'S Manual: Computer-Controlled Dry-Head, Lockstitch, Sleeve Setting Machine With Multi-Programming Devicenorman ahmadNo ratings yet
- Guide Speedmaster CD 102 en PDFDocument6 pagesGuide Speedmaster CD 102 en PDFfootball professionalsNo ratings yet
- VMR Xplain PDFDocument12 pagesVMR Xplain PDFMarcos FlintNo ratings yet
- 16 - Chapter 8 PDFDocument60 pages16 - Chapter 8 PDFJavier Martinez CañalNo ratings yet
- E2E06 ControlSystemsSafetyConcept 01Document24 pagesE2E06 ControlSystemsSafetyConcept 01Juan CaceresNo ratings yet
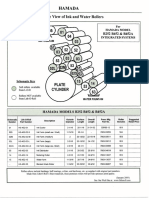
- Hamada:, Rtnhjt-O-A R.R. View WaterDocument10 pagesHamada:, Rtnhjt-O-A R.R. View WaterXaqani AxmedovNo ratings yet
- Keyence FS-V22 使用說明Document4 pagesKeyence FS-V22 使用說明Lúcio M Miranda LimaNo ratings yet
- CP2000 ColorAssistant V43 20050909 eDocument27 pagesCP2000 ColorAssistant V43 20050909 eVillarreal RosasNo ratings yet
- Heidelberg Kord 64 101949Document1 pageHeidelberg Kord 64 101949mohamed riad bensalemNo ratings yet
- M7E10 DampeningUnit 01 PDFDocument18 pagesM7E10 DampeningUnit 01 PDFWissam AldulimeNo ratings yet
- KBA Rapida 105 Series ENGDocument30 pagesKBA Rapida 105 Series ENGولاءومحمد AHMEDNo ratings yet
- Marketed and Distributed By:: Monotech Systems LimitedDocument7 pagesMarketed and Distributed By:: Monotech Systems Limitedkathir_cNo ratings yet
- 1 Printing Unit ChecklistDocument5 pages1 Printing Unit ChecklistMagnus BergmanNo ratings yet
- SM CX 75 Manual 1Document20 pagesSM CX 75 Manual 1Ali HussnainNo ratings yet
- 1 Preface: 1.1 Notes For The ReaderDocument14 pages1 Preface: 1.1 Notes For The ReaderDaniel GureanuNo ratings yet
- Standard Blanket Sizes and Bars Per Machine TypeDocument5 pagesStandard Blanket Sizes and Bars Per Machine TypeBruno FerreiraNo ratings yet
- Ryobi 750wDocument19 pagesRyobi 750wSerhii ZhytnykNo ratings yet
- POLAR - Cutting in PracticeDocument24 pagesPOLAR - Cutting in PracticePetrtmNo ratings yet
- SM 74Document27 pagesSM 74mail4281No ratings yet
- MC 8Document46 pagesMC 8Christian Marcelo VallejosNo ratings yet
- CMYK Gray Balance Control Strip FOGRA39Document1 pageCMYK Gray Balance Control Strip FOGRA39Pablo Emilio Espoz MezaNo ratings yet
- 201 - 200landa NanographyDocument12 pages201 - 200landa NanographykjkrishnanNo ratings yet
- Technical Data Speedmaster SM 102: Printing Stock Blanket CylinderDocument1 pageTechnical Data Speedmaster SM 102: Printing Stock Blanket CylinderAHMED MALALNo ratings yet
- Sheet Alignment ControlDocument13 pagesSheet Alignment Controlمحمد محمودNo ratings yet
- Kord Operation Manual PDFDocument55 pagesKord Operation Manual PDFMuc ChavapaNo ratings yet
- ROLAND 900.: High Degree of Automation For Broadsheet Size (82 /113, 89/126, 100/140)Document19 pagesROLAND 900.: High Degree of Automation For Broadsheet Size (82 /113, 89/126, 100/140)KonradNo ratings yet
- SWF/E-1501T Standard 15-Needle Single-Head Embroidery MachineDocument2 pagesSWF/E-1501T Standard 15-Needle Single-Head Embroidery MachineYoganand DhandapaniNo ratings yet
- PDF User Manual AMD360A With Aprinter DriverDocument7 pagesPDF User Manual AMD360A With Aprinter DriverInversiones JapesaNo ratings yet
- Special Equipment: Service Training MechanikDocument16 pagesSpecial Equipment: Service Training Mechanikfroilan ochoa100% (1)
- Mimaki JV3-160 SP PDFDocument136 pagesMimaki JV3-160 SP PDFAlisson BrighentiNo ratings yet
- TDB XL145 162 enDocument2 pagesTDB XL145 162 enLe Thanh HuyNo ratings yet
- Product Manual - : Shenzhen Johope Technology Co.,LtdDocument41 pagesProduct Manual - : Shenzhen Johope Technology Co.,LtdManoel Avila0% (1)
- Duplo DB-200 Instruction Manual Perfect Binding DB-200Document18 pagesDuplo DB-200 Instruction Manual Perfect Binding DB-200Javier Rivera100% (1)
- Discrete Flat No-Leads DFN Package PosterDocument1 pageDiscrete Flat No-Leads DFN Package Posterbbxload319No ratings yet
- Epson Stylus Pro 7890/9890: User'S GuideDocument224 pagesEpson Stylus Pro 7890/9890: User'S GuideTayyab GillaniNo ratings yet
- Elantrix DX User's ManualDocument30 pagesElantrix DX User's ManualCesar AugustoNo ratings yet
- Linotype: Plug-In ManualDocument7 pagesLinotype: Plug-In ManualGRABADOS EXPRESNo ratings yet
- User ElantrixDocument11 pagesUser Elantrixwdanel2428No ratings yet
- CTP Tools DescriptionDocument26 pagesCTP Tools Descriptionsanchezm881100% (1)
- Wireless Flex Sensor Control Robot ArmDocument54 pagesWireless Flex Sensor Control Robot Armmohammed hussainNo ratings yet
- Perform Quality AssuranceDocument11 pagesPerform Quality AssuranceHammad HassanNo ratings yet
- PMI Lexicon FinalDocument0 pagesPMI Lexicon Finaltuku67100% (1)
- CorelDRAW Graphics Suite 2019 PDFDocument20 pagesCorelDRAW Graphics Suite 2019 PDFHammad HassanNo ratings yet
- EVD Based Channel EstimationDocument5 pagesEVD Based Channel EstimationHammad HassanNo ratings yet
- HFSS TutorialDocument68 pagesHFSS Tutorial7101981100% (5)
- Chairman KPT Inaugurated Upgraded ICU at KPT HospitalDocument1 pageChairman KPT Inaugurated Upgraded ICU at KPT HospitalHammad HassanNo ratings yet
- Medical RulesDocument5 pagesMedical RulesHammad HassanNo ratings yet
- Doc4-LTE Workshop TUN Session3 LTE OverviewDocument82 pagesDoc4-LTE Workshop TUN Session3 LTE OverviewDebasis Roy100% (1)
- Chairman KPT Inaugurated Upgraded ICU at KPT HospitalDocument1 pageChairman KPT Inaugurated Upgraded ICU at KPT HospitalHammad HassanNo ratings yet
- Anna University Transmission Lines and Wave Guide Lecture NotesDocument64 pagesAnna University Transmission Lines and Wave Guide Lecture NotesHammad HassanNo ratings yet
- Advantages of MimoDocument1 pageAdvantages of MimoHammad HassanNo ratings yet
- Advantages of MimoDocument1 pageAdvantages of MimoHammad HassanNo ratings yet
- Table IDocument3 pagesTable IHammad HassanNo ratings yet
- Multichannel Virtual Access Points For Seamless Handoffs in IEEE 802.11 Wireless NetworksDocument5 pagesMultichannel Virtual Access Points For Seamless Handoffs in IEEE 802.11 Wireless NetworksHammad HassanNo ratings yet
- Anechoic Chambers 2Document9 pagesAnechoic Chambers 2Solomon RajaNo ratings yet
- Word Smart I - Printed VersionDocument179 pagesWord Smart I - Printed VersionHammad HassanNo ratings yet
- Pakistan Civil Aviation Authority Requires Services of Qualified Individuals To Fill The Following Vacant PostsDocument3 pagesPakistan Civil Aviation Authority Requires Services of Qualified Individuals To Fill The Following Vacant PostsHammad HassanNo ratings yet
- Designing A Small Satellite in LEO For Remote Sensing ApplicationDocument6 pagesDesigning A Small Satellite in LEO For Remote Sensing ApplicationHammad HassanNo ratings yet
- AGYSQ AnalogyesDocument6 pagesAGYSQ AnalogyesAwais QayyumNo ratings yet
- Cooperative Diversity in Wireless Networks: Efficient Protocols and Outage BehaviorDocument19 pagesCooperative Diversity in Wireless Networks: Efficient Protocols and Outage BehaviorsamirdeefNo ratings yet
- Opportunity For MS and PHD in South Korea - For - 2014 - Spring - SemesterDocument2 pagesOpportunity For MS and PHD in South Korea - For - 2014 - Spring - SemesterHammad HassanNo ratings yet
- By William A Mellors PDFDocument6 pagesBy William A Mellors PDFHammad HassanNo ratings yet
- By William A Mellors PDFDocument6 pagesBy William A Mellors PDFHammad HassanNo ratings yet
- WP Voice MigrationDocument24 pagesWP Voice MigrationHammad HassanNo ratings yet
- Responsibility For Preserving The Environment Ultimately Belongs To Each Individual & Not To GovernmentDocument1 pageResponsibility For Preserving The Environment Ultimately Belongs To Each Individual & Not To GovernmentHammad HassanNo ratings yet
- UTS Engineering Masters Scholarships for Outstanding International StudentsDocument8 pagesUTS Engineering Masters Scholarships for Outstanding International StudentsHammad HassanNo ratings yet
- JSA PengoperasianDocument2 pagesJSA PengoperasianFFQ33No ratings yet
- Introduction To Deep LearningDocument151 pagesIntroduction To Deep Learningxtian_villaruzNo ratings yet
- Computer Vision Used in Self-Driving CarsDocument30 pagesComputer Vision Used in Self-Driving Carsjaseem CKNo ratings yet
- MarkingDocument26 pagesMarkingjames.anitNo ratings yet
- Artificial IntelligenceDocument17 pagesArtificial IntelligenceArfaan XhAikhNo ratings yet
- Artificial Intelligence - WikipediaDocument42 pagesArtificial Intelligence - WikipediaSanjaya Kumar PandaNo ratings yet
- Student Notes - Convolutional Neural Networks (CNN) Introduction - Belajar Pembelajaran Mesin IndonesiaDocument14 pagesStudent Notes - Convolutional Neural Networks (CNN) Introduction - Belajar Pembelajaran Mesin Indonesiaandres alfonso varelo silgadoNo ratings yet
- CPS 4801 Artificial Intelligence: Instructor: Tian (Tina) TianDocument36 pagesCPS 4801 Artificial Intelligence: Instructor: Tian (Tina) TianGuiaki GarciaNo ratings yet
- HIRADocument7 pagesHIRAAkhilesh DubeyNo ratings yet
- Faculty Development on AI ApplicationsDocument10 pagesFaculty Development on AI Applicationsarunasekaran100% (1)
- HAZOP Study Based On ANFIS Layer of Protection Analysis in Unit Kiln PT. Semen Indonesia Factory TubanDocument2 pagesHAZOP Study Based On ANFIS Layer of Protection Analysis in Unit Kiln PT. Semen Indonesia Factory TubanberlianaNo ratings yet
- IESL Electrical InstallationDocument2 pagesIESL Electrical InstallationMuhammed IfkazNo ratings yet
- Seq 2 SeqDocument50 pagesSeq 2 SeqBouhafs AbdelkaderNo ratings yet
- BCSE9020 SyllabusDocument1 pageBCSE9020 SyllabusabcNo ratings yet
- AI Group8Document11 pagesAI Group8meghana kanseNo ratings yet
- Pertemuan 5 FIS - 2Document34 pagesPertemuan 5 FIS - 2Noormalita IrvianaNo ratings yet
- Feature Extraction Using Deep Learning For Food Type RecognitionDocument4 pagesFeature Extraction Using Deep Learning For Food Type RecognitionfarooqespnNo ratings yet
- Behavior Based RoboticsDocument4 pagesBehavior Based RoboticsBharathNo ratings yet
- Deep Learning - Wikipedia, The Free EncyclopediaDocument27 pagesDeep Learning - Wikipedia, The Free EncyclopediagarbageNo ratings yet
- International Journal of Artificial Intelligence and Soft Computing (IJAISC)Document2 pagesInternational Journal of Artificial Intelligence and Soft Computing (IJAISC)CS & ITNo ratings yet
- Soft computing and optimization techniquesDocument1 pageSoft computing and optimization techniquessindhu-aravinda9No ratings yet
- HIRA 009 Bunkering.Document4 pagesHIRA 009 Bunkering.srinibas mohapatraNo ratings yet
- Prime Minister's OHS training calendar July 2020-June 2021Document2 pagesPrime Minister's OHS training calendar July 2020-June 2021Ibada Ahmed100% (2)
- AI For Everyone Quiz AnswersDocument3 pagesAI For Everyone Quiz Answersatif jabbar79% (58)
- 15CS324E lp2017Document4 pages15CS324E lp2017Padma SanthoshNo ratings yet
- PrakashDocument16 pagesPrakashpprakashoNo ratings yet
- AIDocument48 pagesAIendro123No ratings yet
- Hindi Handwritten Character Recognition Using Deep LearningDocument7 pagesHindi Handwritten Character Recognition Using Deep LearningtenzinNo ratings yet
- Nanotech Uses and ConcernsDocument10 pagesNanotech Uses and ConcernsJUHANA MACARIMBANG100% (1)