You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- EE060 Electro Hydraulic Controls TP InstDocument141 pagesEE060 Electro Hydraulic Controls TP InstSameera KodikaraNo ratings yet
- SmoothingDocument3 pagesSmoothingunaibmyfriend100% (1)
- Logik IR100 Instruction ManualDocument22 pagesLogik IR100 Instruction ManualPhilip Strong80% (5)
- Personal Online Risk AssessmentDocument6 pagesPersonal Online Risk AssessmentPhilip StrongNo ratings yet
- Should Governments Monitor Network Usage To Support National DefenseDocument8 pagesShould Governments Monitor Network Usage To Support National DefensePhilip StrongNo ratings yet
- Run Time Analysis of Insertion Sort and Quick SortDocument20 pagesRun Time Analysis of Insertion Sort and Quick SortPhilip StrongNo ratings yet
- CM0112 Programming Project: Java BeetleDocument38 pagesCM0112 Programming Project: Java BeetlePhilip StrongNo ratings yet
- Secomam Basic Analyzer - Service ManualDocument94 pagesSecomam Basic Analyzer - Service Manualأنور مازوز أبو يوسفNo ratings yet
- Design of Low Cost and Efficient Water Level Controller: June 2014Document5 pagesDesign of Low Cost and Efficient Water Level Controller: June 2014Anirudh AryanNo ratings yet
- EE102 Electronic Engineering IIDocument11 pagesEE102 Electronic Engineering II211164 211164No ratings yet
- Signal Integerity Important GuidelinesDocument5 pagesSignal Integerity Important Guidelinesjitu_4No ratings yet
- Laser Scanning MicrosDocument13 pagesLaser Scanning MicrosHà An Đỗ NgọcNo ratings yet
- Semiconductor Electronics:: Materials, Devices and Simple CircuitsDocument46 pagesSemiconductor Electronics:: Materials, Devices and Simple CircuitsBibha KumariNo ratings yet
- Features... : Programmable Logic Device FamilyDocument62 pagesFeatures... : Programmable Logic Device FamilyhppaulalexNo ratings yet
- Power Amplifier DissertationDocument7 pagesPower Amplifier DissertationCustomCollegePaperUK100% (1)
- Casio Qv-70b - 70c SM CamaraDocument26 pagesCasio Qv-70b - 70c SM CamaraDoru RazvanNo ratings yet
- SEMINAR ON IgctDocument22 pagesSEMINAR ON Igctapi-19757160No ratings yet
- Note 5438Document16 pagesNote 5438dorin serbanNo ratings yet
- Circuit Design - Time Borrowing and Time StealingDocument5 pagesCircuit Design - Time Borrowing and Time StealingarunsrlNo ratings yet
- BFC 1010Document10 pagesBFC 1010ElectromateNo ratings yet
- BGA FailuresDocument12 pagesBGA FailuresAdam PegielNo ratings yet
- Picmicro™ Mid-Range Mcu Family Reference Manual: 1997 Microchip Technology Inc. December 1997 /Ds33023ADocument172 pagesPicmicro™ Mid-Range Mcu Family Reference Manual: 1997 Microchip Technology Inc. December 1997 /Ds33023AUriel MorenoNo ratings yet
- CSIR Chemical Science December 2014Document41 pagesCSIR Chemical Science December 2014sampreetiNo ratings yet
- PN Dioed 3265 Ch1 IntrDocument18 pagesPN Dioed 3265 Ch1 Intrbobca117No ratings yet
- Basic Electronics Diploma MicroprojectDocument13 pagesBasic Electronics Diploma MicroprojectAmey Pashte91% (11)
- STW 11 NK 100 ZDocument14 pagesSTW 11 NK 100 ZAnonymous nC9gpUWPNo ratings yet
- Lesson Plan: Unit 1Document6 pagesLesson Plan: Unit 1saravanaeee2004No ratings yet
- Service Manual: Colour TelevisionDocument48 pagesService Manual: Colour TelevisionRoosevelt Vega SanchezNo ratings yet
- A Comparative Study of Various Multi-Level Inverter Based On Multi-CellDocument4 pagesA Comparative Study of Various Multi-Level Inverter Based On Multi-CellTarak BenslimaneNo ratings yet
- Mini Project Lab ManualDocument7 pagesMini Project Lab Manualblzz2netNo ratings yet
- Miniature Square Photoelectric Sensor in Plastic Housing: FeaturesDocument22 pagesMiniature Square Photoelectric Sensor in Plastic Housing: FeaturesChinthana Dinesh WickramaarachchiNo ratings yet
- A CMOS Laser Sensor That's Optimum For Simple Measurements: Smart Sensor Laser Sensor With Built-In AmplifierDocument7 pagesA CMOS Laser Sensor That's Optimum For Simple Measurements: Smart Sensor Laser Sensor With Built-In AmplifierAmiltech MecatronicaNo ratings yet
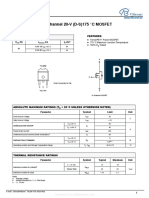
- N-Channel 20-V (D-S) 175 - C MOSFET: Features Product SummaryDocument6 pagesN-Channel 20-V (D-S) 175 - C MOSFET: Features Product SummarySivaNo ratings yet
- Shigley S Mechanical Engineering Design 9th Edition Solutions ManualDocument29 pagesShigley S Mechanical Engineering Design 9th Edition Solutions ManualZaim AkmalNo ratings yet
- Setting Up A Fiber Optic Digital LinkDocument5 pagesSetting Up A Fiber Optic Digital LinkDayanand Gowda Kr100% (1)