You might also like
- A Randomized Algorithm For Finding A Path Subject To Multiple Qos ConstraintsDocument16 pagesA Randomized Algorithm For Finding A Path Subject To Multiple Qos ConstraintsAbir ChakrabortyNo ratings yet
- Its Implementation in NS2 A New Path Computation Algorithm andDocument6 pagesIts Implementation in NS2 A New Path Computation Algorithm andأبو أيوب تافيلالتNo ratings yet
- Advanced Routing Algorithms and Load Balancing On MPLS: E-MailDocument6 pagesAdvanced Routing Algorithms and Load Balancing On MPLS: E-MailJyoti Rohitt SharmaNo ratings yet
- Measurement Based Optimal Multi-Path Routing: Kornmareddy. J. La. Mark A. Shayman, BobbyDocument10 pagesMeasurement Based Optimal Multi-Path Routing: Kornmareddy. J. La. Mark A. Shayman, BobbytunaguvenNo ratings yet
- Distributed Back-Pressure Scheduling With Opportunistic Routing in Cognitive Radio NetworksDocument14 pagesDistributed Back-Pressure Scheduling With Opportunistic Routing in Cognitive Radio NetworksVicky PatelNo ratings yet
- VOIPDocument5 pagesVOIPFatima KhalilNo ratings yet
- Preserv of Optic Net DesignDocument14 pagesPreserv of Optic Net Designchaidar_lakareNo ratings yet
- Probabilistic Scheme Hierarchical Qos RoutingDocument6 pagesProbabilistic Scheme Hierarchical Qos RoutingosjuroNo ratings yet
- Resource Provisioning For Multigranular Traffic Flows in Multilayer NetworksDocument7 pagesResource Provisioning For Multigranular Traffic Flows in Multilayer NetworksgmarkovicNo ratings yet
- Routing Traffic With Quality-of-Service Guarantees in Integrated Services NetworksDocument15 pagesRouting Traffic With Quality-of-Service Guarantees in Integrated Services Networksأبو أيوب تافيلالتNo ratings yet
- Yuh-Shyan Chen, Shin-Jr Jan, and Ming-Chin Chuang: Abstract - This Paper Proposes A New Qos Routing ProtocolDocument4 pagesYuh-Shyan Chen, Shin-Jr Jan, and Ming-Chin Chuang: Abstract - This Paper Proposes A New Qos Routing ProtocolNavneet GargNo ratings yet
- Tradeoffs in Designing Networks With End-To-End Statistical Qos GuaranteesDocument22 pagesTradeoffs in Designing Networks With End-To-End Statistical Qos GuaranteeseugeneNo ratings yet
- Load Balancing in WDM Networks Through Adaptive Routing Table ChangesDocument12 pagesLoad Balancing in WDM Networks Through Adaptive Routing Table ChangesKarthi KeyanNo ratings yet
- Performance Analysis of Asynchronous Optical Burst Switching NetworksDocument5 pagesPerformance Analysis of Asynchronous Optical Burst Switching Networkssurendiran123No ratings yet
- A Novel BasedDocument7 pagesA Novel BasedSangeetha RamanNo ratings yet
- Traffic Grooming, Routing, and Wavelength Assignment in WDM Transport Networks With Sparse Grooming ResourcesDocument20 pagesTraffic Grooming, Routing, and Wavelength Assignment in WDM Transport Networks With Sparse Grooming ResourcesfoxbonesNo ratings yet
- Wavelength Converter Placement in Optical Networks Using Genetic AlgorithmsDocument10 pagesWavelength Converter Placement in Optical Networks Using Genetic AlgorithmsBiswajit DuttaNo ratings yet
- AWGN3Document9 pagesAWGN3Mohamed Kadhem KarrayNo ratings yet
- Improved Lightpath (Wavelength) Routing inDocument9 pagesImproved Lightpath (Wavelength) Routing inRashmi S IyengarNo ratings yet
- Random Walks and GreenDocument3 pagesRandom Walks and GreenimbpulsrprojectNo ratings yet
- Path Computation For Incoming Interface Multipath Routing: Mérindol Pascal, Pansiot Jean-Jacques, Cateloin StéphaneDocument11 pagesPath Computation For Incoming Interface Multipath Routing: Mérindol Pascal, Pansiot Jean-Jacques, Cateloin Stéphanecrana10No ratings yet
- Quality-Of-Service Class Specific Traffic Matrices in IP/MPLS NetworksDocument6 pagesQuality-Of-Service Class Specific Traffic Matrices in IP/MPLS NetworksDavid SteahlNo ratings yet
- Qos For Ad Hoc Networking Based On Multiple Metrics: Bandwidth and DelayDocument4 pagesQos For Ad Hoc Networking Based On Multiple Metrics: Bandwidth and Delayro11seNo ratings yet
- With Qos Ip WDM: Explicit Routing ConstraintsDocument9 pagesWith Qos Ip WDM: Explicit Routing ConstraintsAlok Kumar JawlaNo ratings yet
- 04-Creating and Managing Dynamic MPLS Tunnel by Using SDN NotionDocument8 pages04-Creating and Managing Dynamic MPLS Tunnel by Using SDN NotionHerschel PomaliaNo ratings yet
- Congestion Control For Creation: Srecko Davor BonaeidDocument4 pagesCongestion Control For Creation: Srecko Davor BonaeidsaranginNo ratings yet
- Routing and Multicast in Multihop, Mobile Wireless NetworksDocument6 pagesRouting and Multicast in Multihop, Mobile Wireless NetworksrishikarthickNo ratings yet
- Effects of Interference On Wireless Mesh Networks: Pathologies and A Preliminary SolutionDocument7 pagesEffects of Interference On Wireless Mesh Networks: Pathologies and A Preliminary SolutionsantiagoescobarwatsonNo ratings yet
- A Cross-Layer-Based Routing With Qos-Aware Scheduling For Wireless Sensor NetworksDocument8 pagesA Cross-Layer-Based Routing With Qos-Aware Scheduling For Wireless Sensor NetworksPoojaCambsNo ratings yet
- Leonid, Guerin, Vperis Kumar@ece - Iisc.ernet - inDocument33 pagesLeonid, Guerin, Vperis Kumar@ece - Iisc.ernet - inChindu KrishNo ratings yet
- Sensors: LQER: A Link Quality Estimation Based Routing For Wireless Sensor NetworksDocument14 pagesSensors: LQER: A Link Quality Estimation Based Routing For Wireless Sensor NetworksHaouas HanenNo ratings yet
- QOS of OpnetDocument8 pagesQOS of OpnetsszNo ratings yet
- Jise 202201 03Document16 pagesJise 202201 03samirNo ratings yet
- Solving Bandwidth-Guaranteed Routing Problem Using Routing DataDocument12 pagesSolving Bandwidth-Guaranteed Routing Problem Using Routing DataAIRCC - IJCNCNo ratings yet
- An Efficient Approach To Support Qos and Bandwidth Efficiency inDocument9 pagesAn Efficient Approach To Support Qos and Bandwidth Efficiency inaoanh02No ratings yet
- p186 Barrenechea PDFDocument10 pagesp186 Barrenechea PDFHenrique Mariano AmaralNo ratings yet
- Connection Admission Grooming in PCE Based Architecture Incorporating Dynamic Fiber State Information With Combined RWADocument10 pagesConnection Admission Grooming in PCE Based Architecture Incorporating Dynamic Fiber State Information With Combined RWArajaranjayNo ratings yet
- Multi Path SelectionDocument9 pagesMulti Path SelectionThuy Ngan TranNo ratings yet
- Routing Without Routes: The Backpressure Collection ProtocolDocument12 pagesRouting Without Routes: The Backpressure Collection Protocolsampada_kathareNo ratings yet
- Performance Evaluation of Demand Routing Protocols of ManetsDocument5 pagesPerformance Evaluation of Demand Routing Protocols of ManetsNader JalalNo ratings yet
- High Performance Network-on-Chip Through MPLSDocument4 pagesHigh Performance Network-on-Chip Through MPLSJournal of ComputingNo ratings yet
- Design of Cross-Layer Qos Scheme in Wimax Networks: Yiting Mai, Chunchuan Yang, Jengyueng Chen, Zhiyu WuDocument10 pagesDesign of Cross-Layer Qos Scheme in Wimax Networks: Yiting Mai, Chunchuan Yang, Jengyueng Chen, Zhiyu WuAnnie J. WingNo ratings yet
- Capacity Allocation Journal RevisedDocument30 pagesCapacity Allocation Journal RevisedAnkita KageNo ratings yet
- Opportunistic Routing in Dynamic Ad Hoc Networks: The OPRAH ProtocolDocument4 pagesOpportunistic Routing in Dynamic Ad Hoc Networks: The OPRAH Protocolsantana_bestNo ratings yet
- Chapter 1Document13 pagesChapter 1Hemn KamalNo ratings yet
- Loop-Free Routing Using Diffusing Computations: Abstract-ADocument12 pagesLoop-Free Routing Using Diffusing Computations: Abstract-Anguyendanhson1409No ratings yet
- Survey On Mobile Ad Hoc Network Routing Protocols and Cross-Layer DesignDocument26 pagesSurvey On Mobile Ad Hoc Network Routing Protocols and Cross-Layer DesignvjrathiNo ratings yet
- An Adaptive Routing Algorithm For Communication Networks Using Back Pressure TechniqueDocument5 pagesAn Adaptive Routing Algorithm For Communication Networks Using Back Pressure TechniqueIJMERNo ratings yet
- Lightpath-Level Active Rerouting Algorithms in AllDocument6 pagesLightpath-Level Active Rerouting Algorithms in AllKashif ManzoorNo ratings yet
- ECE 695N Final Project: Ravish Khosla April 22, 2010Document15 pagesECE 695N Final Project: Ravish Khosla April 22, 2010Osidibo Bayuu LivelifeNo ratings yet
- Qos Routing Solutions For Mobile Ad Hoc Network: Jiwa AbdullahDocument38 pagesQos Routing Solutions For Mobile Ad Hoc Network: Jiwa Abdullahأبو أيوب تافيلالتNo ratings yet
- Evaluation Study of Qos-Enabled AodvDocument6 pagesEvaluation Study of Qos-Enabled Aodvshakeel8325No ratings yet
- Bandwidth Optimization Through Dynamic Routing in ATM Networks: Genetic Algorithm & Tabu Search ApproachDocument5 pagesBandwidth Optimization Through Dynamic Routing in ATM Networks: Genetic Algorithm & Tabu Search ApproachPrateek BahetiNo ratings yet
- Intra Domain Traffic EngineeringDocument20 pagesIntra Domain Traffic EngineeringJovanni Ivan JabatNo ratings yet
- Joint On-Demand Routing and Spectrum Assignment in Cognitive Radio NetworksDocument5 pagesJoint On-Demand Routing and Spectrum Assignment in Cognitive Radio NetworksSatish NaiduNo ratings yet
- Effective Routing Metric For Wireless Multi-Hop NetworksDocument12 pagesEffective Routing Metric For Wireless Multi-Hop NetworksIJEC_EditorNo ratings yet
- Traffic Engineering With MPLS in The Internet: Xipeng Xiao, Alan Hannan, Brook Bailey Lionel M. NiDocument14 pagesTraffic Engineering With MPLS in The Internet: Xipeng Xiao, Alan Hannan, Brook Bailey Lionel M. NiAndreso LozadabNo ratings yet
- Heterogeneous Tech Oct07Document23 pagesHeterogeneous Tech Oct07Satish NaiduNo ratings yet
- Ayman Mustafa Hassan Mohamed - Smart-Metering-Oriented Routing Protocol Over Power Line Channel - MOD 27062013Document7 pagesAyman Mustafa Hassan Mohamed - Smart-Metering-Oriented Routing Protocol Over Power Line Channel - MOD 27062013Anish FrancisNo ratings yet
- Modeling and Dimensioning of Mobile Wireless Networks: From GSM to LTEFrom EverandModeling and Dimensioning of Mobile Wireless Networks: From GSM to LTENo ratings yet
- Increasing Decreasing Order - bRHAMASTRA PDFDocument10 pagesIncreasing Decreasing Order - bRHAMASTRA PDFMohd RameezNo ratings yet
- Chop-Nod TutorialDocument13 pagesChop-Nod TutorialShubhendra DasNo ratings yet
- TSL SystemDocument4 pagesTSL SystemMann Sales & MarketingNo ratings yet
- Metric System Hand OutDocument3 pagesMetric System Hand OutKenny TothNo ratings yet
- Astm D3282 93 - 260421Document6 pagesAstm D3282 93 - 260421Mark D VillanuevaNo ratings yet
- Journal FYP 6Document7 pagesJournal FYP 6Mira FazziraNo ratings yet
- KPS Inst Manual Ver 6 (1) .1 EngDocument56 pagesKPS Inst Manual Ver 6 (1) .1 EngMiroslav RakicNo ratings yet
- Comparison of Marshall and Superpave Asp PDFDocument7 pagesComparison of Marshall and Superpave Asp PDFwillypraviantoNo ratings yet
- Petroleum Resources and ReservesDocument25 pagesPetroleum Resources and ReservesDarío CruzNo ratings yet
- Review On Thermomechanical Processing of Advanced High Strength SteelsDocument130 pagesReview On Thermomechanical Processing of Advanced High Strength SteelsharishNo ratings yet
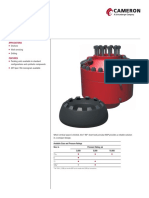
- Short-Body Annular BOP: ApplicationsDocument2 pagesShort-Body Annular BOP: ApplicationsMEHDINo ratings yet
- Plastic Analysis LectureDocument20 pagesPlastic Analysis LecturemartrantNo ratings yet
- Present in The Air. (That Is, The Dew-Point Temperature Is A Measure of The ActualDocument4 pagesPresent in The Air. (That Is, The Dew-Point Temperature Is A Measure of The Actualsitu_tex8594No ratings yet
- Dynamics Homework 2Document3 pagesDynamics Homework 2Ayrton Medina PanezNo ratings yet
- Improvement of Bus-Invert EncodingDocument4 pagesImprovement of Bus-Invert EncodingAlamgir MohammedNo ratings yet
- Balcons Loggias Garde CorpsDocument3 pagesBalcons Loggias Garde CorpsNazim KASSABNo ratings yet
- Stevin, Simon PDFDocument3 pagesStevin, Simon PDFcreeshaNo ratings yet
- Logarithmic Decrement: Consider Eq.8A For Underdamped SystemDocument6 pagesLogarithmic Decrement: Consider Eq.8A For Underdamped SystemFahad ChaudharyNo ratings yet
- WSAC Alternative To CWDocument47 pagesWSAC Alternative To CWweweqweqwNo ratings yet
- Max31856 2Document30 pagesMax31856 2Natália Borges MarcelinoNo ratings yet
- Spheerol LMMDocument2 pagesSpheerol LMMArnaldo BenitezNo ratings yet
- Solution3 HIT Optical FiberDocument10 pagesSolution3 HIT Optical FiberMichael NaymarkNo ratings yet
- Stats C PDFDocument5 pagesStats C PDFMaria SimõesNo ratings yet
- Scia Engineer 2014 - Advanced Concept Training - FEM PDFDocument102 pagesScia Engineer 2014 - Advanced Concept Training - FEM PDFericfgNo ratings yet
- Indicative Solutions: Institute of Actuaries of IndiaDocument9 pagesIndicative Solutions: Institute of Actuaries of IndiaeuticusNo ratings yet
- Tracker Video DesignDocument9 pagesTracker Video DesignwalyatNo ratings yet
- DLP in Science 3Document12 pagesDLP in Science 3Jefferson SisonNo ratings yet
- Rong Liu For Weld Collar TypesDocument14 pagesRong Liu For Weld Collar TypesSourav ceeNo ratings yet
- Calorimetry Lab Student Expolartion SheetDocument10 pagesCalorimetry Lab Student Expolartion SheetAli AlzarooniNo ratings yet
- AAPMDocument52 pagesAAPMDessy AntyNo ratings yet