You might also like
- Over ViewDocument108 pagesOver ViewVadsalasack Tik Vorlavongsor100% (1)
- Math 8 2nd Periodical TestDocument3 pagesMath 8 2nd Periodical TestFotome Temosheteku Tudotojitamo0% (1)
- Channel Estimation Algorithms For OFDM SystemsDocument5 pagesChannel Estimation Algorithms For OFDM Systemsdearprasanta6015No ratings yet
- PENRO Benguet Payroll SystemDocument103 pagesPENRO Benguet Payroll SystemHIMYM FangirlNo ratings yet
- Homework 4 Solution GuidelinesDocument12 pagesHomework 4 Solution GuidelinesSurya AhujaNo ratings yet
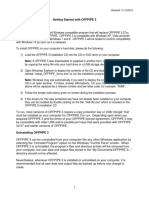
- Getting Started With OFFPIPE 3Document7 pagesGetting Started With OFFPIPE 3Bagus Bagaskara PutraNo ratings yet
- Your password is your date of birthDocument8 pagesYour password is your date of birthUyot SawegaNo ratings yet
- Introduction to Mobile Network Engineering: GSM, 3G-WCDMA, LTE and the Road to 5GFrom EverandIntroduction to Mobile Network Engineering: GSM, 3G-WCDMA, LTE and the Road to 5GNo ratings yet
- CDMA Soft BlockingDocument11 pagesCDMA Soft BlockingvmadanNo ratings yet
- A Capacity Analysis For The IEEE 802.11 MAC Protocol: P S P P S W N G W N W N P S W S SDocument22 pagesA Capacity Analysis For The IEEE 802.11 MAC Protocol: P S P P S W N G W N W N P S W S SShashank BhadaniNo ratings yet
- Clock and Serial Data Communications Channel MeasurementsDocument96 pagesClock and Serial Data Communications Channel MeasurementsKarthik KoneruNo ratings yet
- Eurofgi Workshop On Ip Qos and Traffic Control P. Pereira (Ed.) Lisbon, Portugal, December 6-7, 2007Document8 pagesEurofgi Workshop On Ip Qos and Traffic Control P. Pereira (Ed.) Lisbon, Portugal, December 6-7, 2007nmtien1985No ratings yet
- 1993.performance Analysis of DistributedQ Ueueing Random Access ProtocoDocument24 pages1993.performance Analysis of DistributedQ Ueueing Random Access ProtocoNguyễn Quốc TuấnNo ratings yet
- Journal of Computer Engineering & Technology (JCET) : ©iaemeDocument10 pagesJournal of Computer Engineering & Technology (JCET) : ©iaemeIAEME PublicationNo ratings yet
- Random AccessDocument47 pagesRandom AccessFurqan KhanNo ratings yet
- Unit 3Document89 pagesUnit 3Mehar GuptaNo ratings yet
- Correspondence: An EM-Based Forward-Backward Kalman Filter For The Estimation of Time-Variant Channels in OFDMDocument7 pagesCorrespondence: An EM-Based Forward-Backward Kalman Filter For The Estimation of Time-Variant Channels in OFDMVijayShindeNo ratings yet
- Markov Chain Slotted ALOHADocument2 pagesMarkov Chain Slotted ALOHAAzaharuddinMohdNo ratings yet
- Analysis of Synchronous and A Synchronous Traffic in An FDDI NetworkDocument3 pagesAnalysis of Synchronous and A Synchronous Traffic in An FDDI NetworkArtyom SokolikNo ratings yet
- A4 SolDocument4 pagesA4 SolakttripathiNo ratings yet
- Jitter Based Delay Boundary Prediction of Wide-Area NetworksDocument14 pagesJitter Based Delay Boundary Prediction of Wide-Area NetworksebudhyNo ratings yet
- Performance 99Document7 pagesPerformance 99Tessla ArakalNo ratings yet
- Time Interference Alignment Via Delay Offset For Long Delay NetworksDocument6 pagesTime Interference Alignment Via Delay Offset For Long Delay NetworksmcenkyetisNo ratings yet
- Mutual Information Based Calculation of The Precoding Matrix Indicator For 3GPP UMTS/LTEDocument7 pagesMutual Information Based Calculation of The Precoding Matrix Indicator For 3GPP UMTS/LTEpowerchenNo ratings yet
- Cross-layer Optimization of IEEE 802.11 MAC for Wireless Multihop NetworksDocument3 pagesCross-layer Optimization of IEEE 802.11 MAC for Wireless Multihop NetworksjollydmelloNo ratings yet
- Turbo Codes in MIMO System: 0-7803-9335-X/05/$20.00 ©2005 IEEE 281Document3 pagesTurbo Codes in MIMO System: 0-7803-9335-X/05/$20.00 ©2005 IEEE 281Tra LeNo ratings yet
- Ex 1Document2 pagesEx 1Konstantin SelyuninNo ratings yet
- Pure ALOHADocument6 pagesPure ALOHASatya BaratamNo ratings yet
- Influence of Velocity on Handover Delay in Radio Signal Measurement Based HandoverDocument5 pagesInfluence of Velocity on Handover Delay in Radio Signal Measurement Based HandoverBui ThanhThanhNo ratings yet
- Carrier Recovery and Automatic Gain Control On FPGA's Based Platform (IEEE 802.15.3c Mm-Wave PHY Application)Document5 pagesCarrier Recovery and Automatic Gain Control On FPGA's Based Platform (IEEE 802.15.3c Mm-Wave PHY Application)skalyd100% (1)
- System Model of TH-UWB Using LDPC Code ImplementationDocument7 pagesSystem Model of TH-UWB Using LDPC Code ImplementationJournal of TelecommunicationsNo ratings yet
- Behaviour of OFDM System Using MATLAB SimulationDocument5 pagesBehaviour of OFDM System Using MATLAB Simulationsreekanthreddy peramNo ratings yet
- Multi-User Spreading Codes Retaining Orthogonality Through Unknown Time-And Frequency-Selective FadingDocument5 pagesMulti-User Spreading Codes Retaining Orthogonality Through Unknown Time-And Frequency-Selective FadingReema Al-No ratings yet
- Research Article: Channel Impulse Response Estimation in IEEE 802.11p Via Data Fusion and MMSE EstimatorDocument11 pagesResearch Article: Channel Impulse Response Estimation in IEEE 802.11p Via Data Fusion and MMSE EstimatorGabriel SantosNo ratings yet
- ALOHA System: Assignment No.4Document5 pagesALOHA System: Assignment No.4deedepatilNo ratings yet
- A New Congestion Control Approach On TFRC Over Wired and Wireless NetworksDocument8 pagesA New Congestion Control Approach On TFRC Over Wired and Wireless NetworksInternational Organization of Scientific Research (IOSR)No ratings yet
- Losless Compression of LIGO Data.: Laser Interferometer Gravitational Wave Observatory - LIGODocument10 pagesLosless Compression of LIGO Data.: Laser Interferometer Gravitational Wave Observatory - LIGOVaseline ManNo ratings yet
- Streaming Transmission For Random Arrivals of Data Packets: Won S. YoonDocument10 pagesStreaming Transmission For Random Arrivals of Data Packets: Won S. YoonwonsyoonNo ratings yet
- Underwater Acoustic ModemDocument11 pagesUnderwater Acoustic ModemLoc NguyenNo ratings yet
- Statistically Adaptive Spatial Multiplexing For Time-Varying Correlated MIMO ChannelsDocument31 pagesStatistically Adaptive Spatial Multiplexing For Time-Varying Correlated MIMO ChannelsShalini JainNo ratings yet
- D0262024 PDFDocument5 pagesD0262024 PDFvaishnavi_ece110No ratings yet
- Scheduling Sensor Data Collection With Dynamic Traffic Patterns (Supplementary File)Document3 pagesScheduling Sensor Data Collection With Dynamic Traffic Patterns (Supplementary File)Anita Sofia KeyserNo ratings yet
- Performance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersDocument5 pagesPerformance Analysis of Power Line Communication Using DS-CDMA Technique With Adaptive Laguerre FiltersMasterArvinNo ratings yet
- Lucent 1 X Diversity SchedulingDocument7 pagesLucent 1 X Diversity SchedulingRafid A. Jassem AlashorNo ratings yet
- TSGR1#14 (00) 0869: TSG-RAN Working Group 1 Meeting #14 Oulu, Finland July 4 - 7, 2000Document20 pagesTSGR1#14 (00) 0869: TSG-RAN Working Group 1 Meeting #14 Oulu, Finland July 4 - 7, 2000ngtuyenptitNo ratings yet
- Contention-TDMA Protocol: Performance EvaluationDocument8 pagesContention-TDMA Protocol: Performance EvaluationHira MariamNo ratings yet
- Bandwidth Mismatch and Its Correction in Time-Interleaved Analog-to-Digital Converters - TsungDocument5 pagesBandwidth Mismatch and Its Correction in Time-Interleaved Analog-to-Digital Converters - TsungdienmaytainhagiareNo ratings yet
- TranskateDocument7 pagesTranskateSeptian MuktiNo ratings yet
- Ofdm and Ofdm Channel Estimation: Abhishek Gupta (06102298)Document51 pagesOfdm and Ofdm Channel Estimation: Abhishek Gupta (06102298)Tejpal SinghNo ratings yet
- 55-Polynomial Time PrimalDocument21 pages55-Polynomial Time PrimalttunglNo ratings yet
- Introduction To Ofdm: Nayan SenDocument19 pagesIntroduction To Ofdm: Nayan SenNayan SenNo ratings yet
- Research Inventy: International Journal of Engineering and ScienceDocument5 pagesResearch Inventy: International Journal of Engineering and ScienceinventyNo ratings yet
- Synchronization in IEEE 802.15.4 Zigbee Transceiver Using Matlab SimulinkDocument5 pagesSynchronization in IEEE 802.15.4 Zigbee Transceiver Using Matlab SimulinktesteNo ratings yet
- Traffic Engineering.: Trunking. Grade of ServiceDocument12 pagesTraffic Engineering.: Trunking. Grade of ServiceMeLoNz09No ratings yet
- A Low Cost TDOA Localization System: Setup, Challenges and ResultsDocument4 pagesA Low Cost TDOA Localization System: Setup, Challenges and Resultscuteabhi47No ratings yet
- Communication Systems Solutions Problem Set 12Document3 pagesCommunication Systems Solutions Problem Set 12akttripathiNo ratings yet
- Research Article: Efficient Congestion Mitigation Using Congestion-Aware Steiner Trees and Network Coding TopologiesDocument9 pagesResearch Article: Efficient Congestion Mitigation Using Congestion-Aware Steiner Trees and Network Coding TopologiesRagini SandhyaNo ratings yet
- Data Communication and Networking Chapter ExercisesDocument3 pagesData Communication and Networking Chapter ExercisesMillie TheBaby PuleNo ratings yet
- Opportunistic Splitting Algorithms For Wireless: NetworksDocument11 pagesOpportunistic Splitting Algorithms For Wireless: NetworksGautam DhanabalanNo ratings yet
- Report FP MultipliersDocument12 pagesReport FP MultipliersRajeev SrivastavaNo ratings yet
- GMSK Demodulator Using Costas Loop For Software-Defined RadioDocument5 pagesGMSK Demodulator Using Costas Loop For Software-Defined RadioRanjith ReddyNo ratings yet
- Probabilistic Verification and Evaluation of Backoff Procedure of The WSN ECo-MAC ProtocolDocument15 pagesProbabilistic Verification and Evaluation of Backoff Procedure of The WSN ECo-MAC ProtocolJohn BergNo ratings yet
- 14 Cach Dong Bo Du Lieu - Synchronous TechniquesDocument8 pages14 Cach Dong Bo Du Lieu - Synchronous TechniquesNguyễn Thế TuyênNo ratings yet
- Analytical Modeling of Wireless Communication SystemsFrom EverandAnalytical Modeling of Wireless Communication SystemsNo ratings yet
- Plan Approval Documentation Types - Definitions: Ships / High Speed, Light Craft and Naval Surface Craft / OffshoreDocument27 pagesPlan Approval Documentation Types - Definitions: Ships / High Speed, Light Craft and Naval Surface Craft / OffshoreaseNo ratings yet
- Designing an SCL ProgramDocument28 pagesDesigning an SCL ProgramPirvu Ioan DanielNo ratings yet
- Flutter SMD ClassNotesDocument20 pagesFlutter SMD ClassNoteslava bhaiNo ratings yet
- Pa 6312Document16 pagesPa 6312Atchut AvanapuNo ratings yet
- How To Activate Windows 10 Without Product Keys: CongratulationsDocument4 pagesHow To Activate Windows 10 Without Product Keys: Congratulationsjack percyNo ratings yet
- RSLTE058 - Timing AdvanceDocument8 pagesRSLTE058 - Timing AdvanceHamit AbdNo ratings yet
- Glory RZ 100 Currency RecyclerDocument2 pagesGlory RZ 100 Currency RecyclerAgustin Alonso LasenNo ratings yet
- Micron MT29F1G08ABADAWP IT - D DatasheetDocument93 pagesMicron MT29F1G08ABADAWP IT - D DatasheetmohamedNo ratings yet
- Gekko DSDocument2 pagesGekko DSAnte NekicNo ratings yet
- Declaration of Conformity: According To EN ISO/IEC 17050-1:2010Document1 pageDeclaration of Conformity: According To EN ISO/IEC 17050-1:2010Raj DomadiyaNo ratings yet
- Draft Day Sports College Basketball 2021 Mod GuideDocument7 pagesDraft Day Sports College Basketball 2021 Mod GuideJessika RossNo ratings yet
- Nuvoton-Tech-N32926U1DN C93158 PDFDocument54 pagesNuvoton-Tech-N32926U1DN C93158 PDFСергей КапустаNo ratings yet
- IMG - 0095 MCQ Bank For Computer Fundamentals MRC 20Document1 pageIMG - 0095 MCQ Bank For Computer Fundamentals MRC 20Arwyn BermasNo ratings yet
- Unit 2 NDocument33 pagesUnit 2 Nsathish karthikeyanNo ratings yet
- 01 PresentationDocument75 pages01 PresentationPrasanth JamesNo ratings yet
- Introduction To Unix: WorkbookDocument66 pagesIntroduction To Unix: Workbookabhimanyu thakurNo ratings yet
- Dietpi-Benchmarks - CpuDocument13 pagesDietpi-Benchmarks - CpuFelipeNo ratings yet
- Lecture 04 Layering ArchitectureDocument23 pagesLecture 04 Layering ArchitectureAnshulNo ratings yet
- PreviewDocument93 pagesPreviewLui CarlosNo ratings yet
- 1 Doe TerminologiesDocument3 pages1 Doe TerminologiesSethu Malaravan K ENo ratings yet
- Weather App DevelopmentDocument15 pagesWeather App Developmentdanish parkarNo ratings yet
- Poundit CORPORATE GIVEAWAY PDFDocument9 pagesPoundit CORPORATE GIVEAWAY PDFElcid EintNo ratings yet
- ManuvalDocument320 pagesManuvalsiva123kumartrcNo ratings yet
- A Join Between Two Tables That Returns The Results of The INNER Join As Well As TheDocument4 pagesA Join Between Two Tables That Returns The Results of The INNER Join As Well As TheJepoy DizonNo ratings yet
- ASDMDocument14 pagesASDMAhmad AliNo ratings yet