You might also like
- Cross-Border Electricity Trade Between The Nordic Energy-Only Market and The Russian Capacity-Based MarketDocument43 pagesCross-Border Electricity Trade Between The Nordic Energy-Only Market and The Russian Capacity-Based MarketpongpumNo ratings yet
- Lecture 10Document17 pagesLecture 10pongpumNo ratings yet
- Cross-Border Trade in Electricity and The Development of Renewables Based Electric Power Lessons From EuropeDocument78 pagesCross-Border Trade in Electricity and The Development of Renewables Based Electric Power Lessons From EuropepongpumNo ratings yet
- ALSTOM HVDC For Beginners and BeyondDocument92 pagesALSTOM HVDC For Beginners and BeyondGiorgi ArzianiNo ratings yet
- Reactive Power and Harmonic Filter - ABBDocument49 pagesReactive Power and Harmonic Filter - ABBpongpumNo ratings yet
- Lecture 2Document22 pagesLecture 2pongpumNo ratings yet
- Introduction To HVDC VSC AlstomDocument30 pagesIntroduction To HVDC VSC AlstompongpumNo ratings yet
- Frequency Control PerformanceDocument46 pagesFrequency Control PerformancepongpumNo ratings yet
- Characterization of Dynamic Phenomena On EGAT Tie TransmisDocument7 pagesCharacterization of Dynamic Phenomena On EGAT Tie TransmispongpumNo ratings yet
- Review of The Recent Frequency Performance of The Eastern Western and ERCOT InterconnectionsDocument63 pagesReview of The Recent Frequency Performance of The Eastern Western and ERCOT InterconnectionspongpumNo ratings yet
- NERC Balancing and Frequency Control 040520111Document53 pagesNERC Balancing and Frequency Control 040520111pongpumNo ratings yet
- Power System Protection CoordinationDocument142 pagesPower System Protection Coordinationemogan100% (5)
- Pso Tutorial PDFDocument68 pagesPso Tutorial PDFChandra Shekhar PalNo ratings yet
- Frequency Control Concerns in The North American Electric Power SystemDocument32 pagesFrequency Control Concerns in The North American Electric Power SystempongpumNo ratings yet
- Particle Swarm OptimizationDocument71 pagesParticle Swarm OptimizationMahmoud Abd El HadiNo ratings yet
- IEEE PES Thailand Handouts Pages 1-10Document10 pagesIEEE PES Thailand Handouts Pages 1-10pongpumNo ratings yet
- Particle Swarm OptimizationDocument71 pagesParticle Swarm OptimizationMahmoud Abd El HadiNo ratings yet
- Complex Vector Control of A Unified Power Flow ControllerDocument8 pagesComplex Vector Control of A Unified Power Flow ControllerpongpumNo ratings yet
- Characterization of Dynamic Phenomena On EGAT Tie TransmisDocument7 pagesCharacterization of Dynamic Phenomena On EGAT Tie TransmispongpumNo ratings yet
- Ferroresenance Phenomena of A Station Service Transformer During Black Start and Its Investigatio1Document4 pagesFerroresenance Phenomena of A Station Service Transformer During Black Start and Its Investigatio1pongpumNo ratings yet
- HVDC Transmission Seminar: Intro to Concepts & ApplicationsDocument70 pagesHVDC Transmission Seminar: Intro to Concepts & ApplicationspongpumNo ratings yet
- Characterization of Dynamic Phenomena On EGAT Tie TransmisDocument7 pagesCharacterization of Dynamic Phenomena On EGAT Tie TransmispongpumNo ratings yet
- Binder ENDocument2 pagesBinder ENpongpumNo ratings yet
- Application On Electric Field Distribution in Power Apparatus by FEM Correct1Document58 pagesApplication On Electric Field Distribution in Power Apparatus by FEM Correct1pongpumNo ratings yet
- Lecture On Basic Concept Operation and Control of HVDCDocument74 pagesLecture On Basic Concept Operation and Control of HVDCpongpum0% (1)
- Basic Concept Operation and Control of HVDC Transmission SystemDocument74 pagesBasic Concept Operation and Control of HVDC Transmission Systempongpum100% (7)
- Complex Vector Control of A UPFC For CEPSI 2006 FinalDocument9 pagesComplex Vector Control of A UPFC For CEPSI 2006 FinalpongpumNo ratings yet
- Investigation of Ferro-Resonance Phenomena - Draft Version For Pulse Journal OctDocument4 pagesInvestigation of Ferro-Resonance Phenomena - Draft Version For Pulse Journal OctpongpumNo ratings yet
- Characterization of Dynamic Phenomena On EGAT Tie TransmisDocument7 pagesCharacterization of Dynamic Phenomena On EGAT Tie TransmispongpumNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Liebert GXT4™ UPS, 500VA - 3000VA: Intelligent, Reliable UPS ProtectionDocument4 pagesLiebert GXT4™ UPS, 500VA - 3000VA: Intelligent, Reliable UPS Protection윤석No ratings yet
- TABLE A.5 Shunt Capacitance-Reactance Spacing Factor XD at 10 HZ (Megaohm-Miles Per Conductor)Document2 pagesTABLE A.5 Shunt Capacitance-Reactance Spacing Factor XD at 10 HZ (Megaohm-Miles Per Conductor)Alfonso RiveraNo ratings yet
- PC Power Supply Repair GuideDocument4 pagesPC Power Supply Repair GuideAntonio ChavezNo ratings yet
- Quiz No.1: (C) Flash-Over of InsulatorsDocument32 pagesQuiz No.1: (C) Flash-Over of InsulatorsAdeel AhmadNo ratings yet
- 01-Introduction To VSCDocument30 pages01-Introduction To VSCeng7senNo ratings yet
- Seminar Report on the Benefits of Smart Grid TechnologyDocument29 pagesSeminar Report on the Benefits of Smart Grid TechnologyVivek Saini50% (2)
- VGB PDFDocument16 pagesVGB PDFbajrangNo ratings yet
- 12) Universalmotor2Document7 pages12) Universalmotor2Vinod Kumar KadakalNo ratings yet
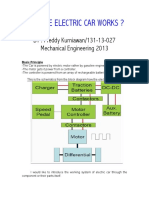
- How The Electric Car WorksDocument6 pagesHow The Electric Car WorksFreddy KurniawanNo ratings yet
- Everything You Need to Know About Wind EnergyDocument12 pagesEverything You Need to Know About Wind EnergyAmexTesfayeKora0% (1)
- Economics of Power GenerationDocument50 pagesEconomics of Power GenerationMukesh SwamiNo ratings yet
- C2000D6Document4 pagesC2000D6Gestión del Talento Humano GEMRANo ratings yet
- RH XDGVDocument120 pagesRH XDGVRAJ NAYAAKNo ratings yet
- Material Hyundai r290lc7 Hydraulic Excavator Electrical System Components Location Switch Connectors Relays Pumps PDFDocument3 pagesMaterial Hyundai r290lc7 Hydraulic Excavator Electrical System Components Location Switch Connectors Relays Pumps PDForlando de oNo ratings yet
- GeneradorDocument8 pagesGeneradorNANDORG27No ratings yet
- Parallel Operation of DC GeneratorDocument9 pagesParallel Operation of DC Generatormark ianNo ratings yet
- PW5 Basic Double Busbar Dis 20Document12 pagesPW5 Basic Double Busbar Dis 20Shanthiyaah ArumugamNo ratings yet
- Emri Product Sheet LRDocument39 pagesEmri Product Sheet LRSyed Mohammad NaveedNo ratings yet
- Polyphase Induction MotorDocument38 pagesPolyphase Induction MotorSaad KhaliqNo ratings yet
- Combine TRDocument8 pagesCombine TRAchmad ZulkifliNo ratings yet
- Brochure 2Document4 pagesBrochure 2Bhargavi SNo ratings yet
- Khashm Elgirba Power StationDocument32 pagesKhashm Elgirba Power StationSalih Ahmed ObeidNo ratings yet
- Conversion of AC Input Into DC OutputDocument10 pagesConversion of AC Input Into DC OutputSehar KhanNo ratings yet
- Software Tool - Moeller Curveselect: Tripping DiagramDocument5 pagesSoftware Tool - Moeller Curveselect: Tripping DiagramTaner ErtürkNo ratings yet
- 8 Reb500 CommisioningDocument22 pages8 Reb500 CommisioningRK KNo ratings yet
- Transformer Wiring ConfigurationsDocument40 pagesTransformer Wiring ConfigurationsAndres Felipe Triviño LaraNo ratings yet
- Flyback Converters With The L6561 PFC Controller: AN1060 Application NoteDocument11 pagesFlyback Converters With The L6561 PFC Controller: AN1060 Application NotegrittinjamesNo ratings yet
- Induction MotorDocument28 pagesInduction Motorsumithra100% (2)
- Catalogue Sheet 7SN71Document6 pagesCatalogue Sheet 7SN71Muhammad NomanNo ratings yet
- Blackout in Southern Portugal in 09/may/2000Document17 pagesBlackout in Southern Portugal in 09/may/2000jjamaranteNo ratings yet