You might also like
- UAV for Mineral Exploration Using Magnetics and SARDocument6 pagesUAV for Mineral Exploration Using Magnetics and SARShivam ShuklaNo ratings yet
- Noise Reduction in Ultrasonic Gas Flow MeasurementDocument9 pagesNoise Reduction in Ultrasonic Gas Flow MeasurementyasminaNo ratings yet
- 11.2 Time-of-Flight Measurements: Basic PrincipleDocument1 page11.2 Time-of-Flight Measurements: Basic Principleابزار دقیقNo ratings yet
- 15 Years of Practical Experience With Fibre Optical Pipeline Leakage DetectionDocument9 pages15 Years of Practical Experience With Fibre Optical Pipeline Leakage DetectionDheeraj Chowdary DhanekulaNo ratings yet
- McmillanDocument26 pagesMcmillanmihail555No ratings yet
- A Novel Experimental Setup For Gas MicroflowsDocument16 pagesA Novel Experimental Setup For Gas MicroflowsAsif HameedNo ratings yet
- 12 The Application of Clamp On Ultrasonic LiprotDocument18 pages12 The Application of Clamp On Ultrasonic LiprotCARLOS ALIDIO MEDINA LOPEZNo ratings yet
- Kuhn e Mcfadden - 1967 - Atmospheric Water Vapor Profiles Derived From RemoDocument5 pagesKuhn e Mcfadden - 1967 - Atmospheric Water Vapor Profiles Derived From RemoRenan Fabres DalmonechNo ratings yet
- Measurement Systems For Electrical Machine Monitoring: Mario Vrazic, Ivan Gasparac and Marinko KovacicDocument19 pagesMeasurement Systems For Electrical Machine Monitoring: Mario Vrazic, Ivan Gasparac and Marinko Kovacicpredic1No ratings yet
- Background: RTLSDR-based, Software Defined Radio Alternative To Switched Radiometers For Continuum Radio AstronomyDocument14 pagesBackground: RTLSDR-based, Software Defined Radio Alternative To Switched Radiometers For Continuum Radio AstronomyDenis ZoqbiNo ratings yet
- Al Ward, W5lua and Barry Malowanchuk, Ve4ma - The Journey To Eme On 24 GHZ Part 2Document5 pagesAl Ward, W5lua and Barry Malowanchuk, Ve4ma - The Journey To Eme On 24 GHZ Part 2Leonardus Suryo SuhartoNo ratings yet
- What Is Telemetry? Briefly Describe Its Applications.: Assignment TitleDocument11 pagesWhat Is Telemetry? Briefly Describe Its Applications.: Assignment TitleNauman HameedNo ratings yet
- AnemometerDocument2 pagesAnemometersuvarnscribdNo ratings yet
- Studies of excited nuclear states by using the γγ-coincidence techniqueDocument11 pagesStudies of excited nuclear states by using the γγ-coincidence techniqueArani ChaudhuriNo ratings yet
- Clinton p332Document11 pagesClinton p332aldilla damayantiNo ratings yet
- (23279834 - HortScience) Gas-Exchange Measurements Using A Large, Closed Plant Growth ChamberDocument4 pages(23279834 - HortScience) Gas-Exchange Measurements Using A Large, Closed Plant Growth ChamberRaul RodriguezNo ratings yet
- An ADV For The Characteristisation of Turubulence in Concentrated Fluid Mud (Gratiot - Etal)Document17 pagesAn ADV For The Characteristisation of Turubulence in Concentrated Fluid Mud (Gratiot - Etal)Sutanto HadiNo ratings yet
- Ultrasonic Domestic Gas Meters - A Review: N. BignellDocument7 pagesUltrasonic Domestic Gas Meters - A Review: N. BignellTimo SmitsNo ratings yet
- 15TH WORLD CONGRESS OF INTERNATIONAL MEASUREMENT CONFEDERATION IMEKO-XV, OSAKA, JAPAN, JUNE 13-18, 1999Document7 pages15TH WORLD CONGRESS OF INTERNATIONAL MEASUREMENT CONFEDERATION IMEKO-XV, OSAKA, JAPAN, JUNE 13-18, 1999Timo SmitsNo ratings yet
- Monitor & Predict Transient Seepage in Levees During FloodsDocument4 pagesMonitor & Predict Transient Seepage in Levees During FloodsDio Alif HutamaNo ratings yet
- Sims Paper2021Document6 pagesSims Paper2021raghav sikkaNo ratings yet
- Antenna-Coupled Niobium Bolometers For Mm-Wave Imaging ArraysDocument8 pagesAntenna-Coupled Niobium Bolometers For Mm-Wave Imaging ArraysClenaNo ratings yet
- Experimental Mode Content Analysis For Coplex Overmoded Waveguire Systems - Cepni Et AlDocument4 pagesExperimental Mode Content Analysis For Coplex Overmoded Waveguire Systems - Cepni Et AldpshepherdNo ratings yet
- 18 Satellite PDFDocument28 pages18 Satellite PDFsweety_1No ratings yet
- Dynamic Line Ratings Based on Weather MeasurementsDocument10 pagesDynamic Line Ratings Based on Weather MeasurementsNataGB100% (1)
- Lorenzo Lodi and Jonathan Tennyson - A Line List of Allowed and Forbidden Rotational Transition Intensities For WaterDocument15 pagesLorenzo Lodi and Jonathan Tennyson - A Line List of Allowed and Forbidden Rotational Transition Intensities For Water4534567No ratings yet
- New Technologies in Marine Seismic Surveying: Overview and Physical Modelling ExperimentsDocument9 pagesNew Technologies in Marine Seismic Surveying: Overview and Physical Modelling ExperimentsAmnaTariqNo ratings yet
- Nikolai F. Zobov Et Al - Hot Bands of Water Up To 6nu2-5nu2 in The 933-2500 CM - 1 RegionDocument19 pagesNikolai F. Zobov Et Al - Hot Bands of Water Up To 6nu2-5nu2 in The 933-2500 CM - 1 RegionGummisXNo ratings yet
- A One Year Comp of Radar and Bubbler T.G in LiverpoolDocument8 pagesA One Year Comp of Radar and Bubbler T.G in Liverpoollatni el mehdiNo ratings yet
- Ultra Wide Band Tech Emerging Wireless CommDocument9 pagesUltra Wide Band Tech Emerging Wireless CommSaket AgarwalNo ratings yet
- A Statistical Path Loss Model For Inhome Uwb ChannelsDocument6 pagesA Statistical Path Loss Model For Inhome Uwb ChannelsRam MurthyNo ratings yet
- Design of A Fuzzy Controller For The Active Chilled Beam SystemDocument6 pagesDesign of A Fuzzy Controller For The Active Chilled Beam SystemhosseinNo ratings yet
- W Read Review of Conventional Tactical Radio Direction Finding Systems 1989 PDFDocument64 pagesW Read Review of Conventional Tactical Radio Direction Finding Systems 1989 PDFsteveNo ratings yet
- Lwa 0168Document34 pagesLwa 0168simhadrihemanthkumarNo ratings yet
- Articulo OriginalDocument4 pagesArticulo OriginalCesar Canales MinayaNo ratings yet
- Wind TunnelDocument11 pagesWind TunnelKoushik RaoNo ratings yet
- Ultrasonic PDFDocument8 pagesUltrasonic PDFMOHAMED SHARKAWINo ratings yet
- Propogation Effects in Satellite SystemsDocument9 pagesPropogation Effects in Satellite SystemssanjubhNo ratings yet
- Microwave Communications and Radar: Target Scattering Cross-SectionDocument6 pagesMicrowave Communications and Radar: Target Scattering Cross-SectionOmotowa DapoNo ratings yet
- Bandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer SystemsDocument11 pagesBandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer Systemssundari_muraliNo ratings yet
- Absolute EPR Spin Echo #69A PDFDocument15 pagesAbsolute EPR Spin Echo #69A PDFchaparalNo ratings yet
- Detecting Microwave Emissions from Water VaporDocument7 pagesDetecting Microwave Emissions from Water VaporRokin Rezwan HaqueNo ratings yet
- Chapter - 1: 1.1 Importance of Atmospherical Vapour For The Climate SystemDocument25 pagesChapter - 1: 1.1 Importance of Atmospherical Vapour For The Climate SystemyaminiNo ratings yet
- Bubble Size and Velocity Measurement in Gas-Liquid Systems: Application Fiber Optic Technique To Pilot Plant ScaleDocument5 pagesBubble Size and Velocity Measurement in Gas-Liquid Systems: Application Fiber Optic Technique To Pilot Plant ScaleAmin SmileyNo ratings yet
- Revised Technical Guidelines For Reliable DC Measurements of The Quantized Hall ResistanceDocument13 pagesRevised Technical Guidelines For Reliable DC Measurements of The Quantized Hall ResistanceSaraNo ratings yet
- Design Considerations For Broadband Seismometers: Erhard Wielandt, Institute of Geophysics, Stuttgart UniversityDocument5 pagesDesign Considerations For Broadband Seismometers: Erhard Wielandt, Institute of Geophysics, Stuttgart UniversityDienNo ratings yet
- Hyperleda: Astronomy AstrophysicsDocument41 pagesHyperleda: Astronomy AstrophysicsAtelo GuzyNo ratings yet
- Geothermal Exploration Best Practices: Seismic Methods, EquipmentDocument8 pagesGeothermal Exploration Best Practices: Seismic Methods, EquipmentZahid MasoodNo ratings yet
- Andre o Poulos 2010Document14 pagesAndre o Poulos 2010anesaNo ratings yet
- Lang 2004Document10 pagesLang 2004samik4uNo ratings yet
- Overhead Line Galloping. Field Experience During One Event in Belgium On Last February 13TH, 1997Document6 pagesOverhead Line Galloping. Field Experience During One Event in Belgium On Last February 13TH, 1997ramsesiNo ratings yet
- Flow Sensors Based On Surface Acoustic Waves: Shrinivas G. JoshiDocument7 pagesFlow Sensors Based On Surface Acoustic Waves: Shrinivas G. Joshighazanfar3No ratings yet
- Publications 2004 12Document16 pagesPublications 2004 12mrizalpahleviNo ratings yet
- Ultrasonic Gas Meters Handbook - InstrometDocument24 pagesUltrasonic Gas Meters Handbook - InstrometDian L.No ratings yet
- Absorption of Electromagnetic Waves in Oxygen: II. Miceowave PhysicsDocument23 pagesAbsorption of Electromagnetic Waves in Oxygen: II. Miceowave PhysicssweetiemaruthiNo ratings yet
- Grounding Potential RaiseDocument10 pagesGrounding Potential RaiseINAMULLAH MASAL KHANNo ratings yet
- Ultrasonic Gas Flow Meter BasicsDocument7 pagesUltrasonic Gas Flow Meter BasicsMalouk CheniouniNo ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Paper 1286Document6 pagesPaper 1286Abhishek SinghNo ratings yet
- Ultra Wide Band (UWB) Radio Technology UWB-RTDocument123 pagesUltra Wide Band (UWB) Radio Technology UWB-RTv2brother100% (1)
- RC Airplane Radio SystemsDocument8 pagesRC Airplane Radio SystemsDanh Le CongNo ratings yet
- Open Handed Lab Adaptive Linear Equalizer: ObjectiveDocument5 pagesOpen Handed Lab Adaptive Linear Equalizer: ObjectiveMiraniNo ratings yet
- 3 EqualizationDocument145 pages3 EqualizationGabriel VillarrealNo ratings yet
- Wireless Usb3 0 Transmitter Wireless Dock Receiver ManualDocument19 pagesWireless Usb3 0 Transmitter Wireless Dock Receiver ManualwilbervizaareNo ratings yet
- Optimize VHF Radio HandbookDocument12 pagesOptimize VHF Radio HandbookVladVeselovskyNo ratings yet
- D4B804EFC26-Manual For Locating Water EntriesDocument24 pagesD4B804EFC26-Manual For Locating Water EntriesjorgebautistagarciaNo ratings yet
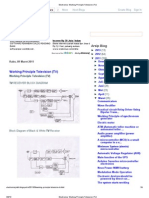
- Working Principle of Television (TVDocument9 pagesWorking Principle of Television (TVSuman DasNo ratings yet
- Early-Stage Detection of Melanoma Skin Cancer Using Contactless Millimeter-Wave SensorsDocument8 pagesEarly-Stage Detection of Melanoma Skin Cancer Using Contactless Millimeter-Wave SensorsChinaski BukowskiNo ratings yet
- CHC RTK GPSDocument26 pagesCHC RTK GPSKyin Khant100% (1)
- Wave Music System: Owner's GuideDocument32 pagesWave Music System: Owner's GuideIBJSC.comNo ratings yet
- Pcs-Unit-Ii MCQDocument6 pagesPcs-Unit-Ii MCQDPL SataraNo ratings yet
- Uplink, Downlink and Link Performance AnalysisDocument128 pagesUplink, Downlink and Link Performance AnalysisMarlon Xavier Aguirre CarchiNo ratings yet
- Free Space Optical CommunicationDocument25 pagesFree Space Optical CommunicationParth Vineel GargNo ratings yet
- United States Patent (19) : Johnson Et AlDocument10 pagesUnited States Patent (19) : Johnson Et AlYou CefNo ratings yet
- Analog ModulationDocument30 pagesAnalog ModulationMhamad OmerNo ratings yet
- Lab 3Document29 pagesLab 3EngrAbdulQaderNo ratings yet
- T, Then The Range May Be Determined by The SimpleDocument15 pagesT, Then The Range May Be Determined by The SimpleJohn CariagaNo ratings yet
- UTX-P03: Uhf Synthesized TransmitterDocument30 pagesUTX-P03: Uhf Synthesized TransmitterAudio TecnologiaNo ratings yet
- Mars 400S Pro: User ManualDocument18 pagesMars 400S Pro: User Manualramanagopal100% (1)
- IR Remote Control Decoder Using Arduino - IR Remote DecoderDocument15 pagesIR Remote Control Decoder Using Arduino - IR Remote Decoderحارث اكرمNo ratings yet
- Owner'S Manual: Solid State Citizens Band Am/Ssb Mobile TransceiverDocument12 pagesOwner'S Manual: Solid State Citizens Band Am/Ssb Mobile Transceiverbellscb100% (1)
- Weather Imaging Cubesat With Telemetry TransmissionDocument2 pagesWeather Imaging Cubesat With Telemetry TransmissionibrahemppppNo ratings yet
- Galaxy Owners Manual dx2517Document9 pagesGalaxy Owners Manual dx2517bellscb100% (1)
- Trueair2 User ManualDocument1 pageTrueair2 User ManualJesus Ruiz MartinNo ratings yet
- Syllabus: For The Post of SCT PC It&CDocument3 pagesSyllabus: For The Post of SCT PC It&CRaaz BangaramNo ratings yet
- Iridium Satillite System-IsSDocument7 pagesIridium Satillite System-IsSChinnambbeti RavitejaNo ratings yet
- Manual de Serviço IC-F14Document32 pagesManual de Serviço IC-F14Anderson Gomes Resende (Gres)No ratings yet
- Troubleshooting - Guild - XT2055 - Moto G8 Power LiteDocument56 pagesTroubleshooting - Guild - XT2055 - Moto G8 Power Litedaniel.lorenzopalaciosNo ratings yet