You might also like
- APC: Self-Tuning, Low Overhead Replacement CacheDocument16 pagesAPC: Self-Tuning, Low Overhead Replacement CacheSergeNo ratings yet
- APC: Self-Tuning, Low Overhead Replacement CacheDocument16 pagesAPC: Self-Tuning, Low Overhead Replacement CacheSergeNo ratings yet
- Learning Forgiving" Hash Functions: Algorithms and Large Scale TestsDocument7 pagesLearning Forgiving" Hash Functions: Algorithms and Large Scale TestsSergeNo ratings yet
- Learning Bounds For Domain AdaptationDocument8 pagesLearning Bounds For Domain AdaptationSergeNo ratings yet
- Combinatorial Algorithms For Web Search Engines - Three Success StoriesDocument5 pagesCombinatorial Algorithms For Web Search Engines - Three Success StoriesSergeNo ratings yet
- Natural Justice and Procedural FairnessDocument2 pagesNatural Justice and Procedural FairnessSerge100% (2)
- Robust Music Identification, Detection, and AnalysisDocument4 pagesRobust Music Identification, Detection, and AnalysisSerge100% (1)
- Algorithm 781: Generating Hilbert's Curve by RecursionDocument6 pagesAlgorithm 781: Generating Hilbert's Curve by RecursionSerge100% (3)
- To Catch A Predator - A Natural Language Approach For Eliciting Malicious PayloadsDocument13 pagesTo Catch A Predator - A Natural Language Approach For Eliciting Malicious PayloadsSergeNo ratings yet
- All Your iFRAMEs Point To UsDocument22 pagesAll Your iFRAMEs Point To UsSerge100% (1)
- Intelligent Email: Reply and Attachment PredictionDocument4 pagesIntelligent Email: Reply and Attachment PredictionSerge100% (3)
- Distributional Identification of Non-Referential PronounsDocument9 pagesDistributional Identification of Non-Referential PronounsSerge100% (2)
- Trading Capacity For Data ProtectionDocument8 pagesTrading Capacity For Data ProtectionSerge100% (1)
- A Machine Learning Framework For Spoken-DialogDocument13 pagesA Machine Learning Framework For Spoken-DialogSergeNo ratings yet
- How To Learn Any Language Quickly, Easily, Inexpensively, Enjoyably and On Your Own PDFDocument15 pagesHow To Learn Any Language Quickly, Easily, Inexpensively, Enjoyably and On Your Own PDFRoberto Mazas SalgadoNo ratings yet
- Formal Semantics of Language and The Richard-Berry ParadoxDocument3 pagesFormal Semantics of Language and The Richard-Berry ParadoxSerge100% (1)
- Automatic Thumbnail Cropping and Its Effectiveness (Best Student Paper)Document10 pagesAutomatic Thumbnail Cropping and Its Effectiveness (Best Student Paper)Serge100% (1)
- Image Segmentation by Branch-and-Mincut (Extended)Document18 pagesImage Segmentation by Branch-and-Mincut (Extended)SergeNo ratings yet
- A Joint Model of Text and Aspect Ratings For Sentiment SummarizationDocument9 pagesA Joint Model of Text and Aspect Ratings For Sentiment SummarizationSergeNo ratings yet
- Index Wiki Database - Design and ExperimentsDocument18 pagesIndex Wiki Database - Design and ExperimentsSergeNo ratings yet
- Improving People Search Using Query Expansions - How Friends Help To Find PeopleDocument14 pagesImproving People Search Using Query Expansions - How Friends Help To Find PeopleSergeNo ratings yet
- Searching The World's Herbaria - A System of Visual Identification of Plant SpeciesDocument14 pagesSearching The World's Herbaria - A System of Visual Identification of Plant SpeciesSerge100% (1)
- Hamming Embedding and Weak Geometric Consistency For Large Scale Image SearchDocument14 pagesHamming Embedding and Weak Geometric Consistency For Large Scale Image SearchSergeNo ratings yet
- Priors For Large Photo Collections and What They Reveal About CamerasDocument14 pagesPriors For Large Photo Collections and What They Reveal About CamerasSergeNo ratings yet
- Human Activity Recognition With Metric LearningDocument14 pagesHuman Activity Recognition With Metric LearningSerge100% (1)
- Discriminative Sparse Image Models For Class-Specific Edge Detection and Image InterpretationDocument14 pagesDiscriminative Sparse Image Models For Class-Specific Edge Detection and Image InterpretationSergeNo ratings yet
- Learning To Localize Objects With Structured Output RegressionDocument14 pagesLearning To Localize Objects With Structured Output RegressionSerge100% (1)
- Flexible Depth of Field PhotographyDocument14 pagesFlexible Depth of Field PhotographySergeNo ratings yet
- First Steps Toward An Electronic Field Guide For PlantsDocument14 pagesFirst Steps Toward An Electronic Field Guide For PlantsSergeNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Galaxy Owners Manual Dx98vhpDocument10 pagesGalaxy Owners Manual Dx98vhpbellscbNo ratings yet
- Efaverenz p1Document4 pagesEfaverenz p1Pragat KumarNo ratings yet
- United-nations-Organization-uno Solved MCQs (Set-4)Document8 pagesUnited-nations-Organization-uno Solved MCQs (Set-4)SãñÂt SûRÿá MishraNo ratings yet
- PowerPointHub Student Planner B2hqY8Document25 pagesPowerPointHub Student Planner B2hqY8jersey10kNo ratings yet
- Dance Appreciation and CompositionDocument1 pageDance Appreciation and CompositionFretz Ael100% (1)
- Returnable Goods Register: STR/4/005 Issue 1 Page1Of1Document1 pageReturnable Goods Register: STR/4/005 Issue 1 Page1Of1Zohaib QasimNo ratings yet
- Unr Ece R046Document74 pagesUnr Ece R046rianteri1125No ratings yet
- Price List PPM TerbaruDocument7 pagesPrice List PPM TerbaruAvip HidayatNo ratings yet
- 2020 Global Finance Business Management Analyst Program - IIMDocument4 pages2020 Global Finance Business Management Analyst Program - IIMrishabhaaaNo ratings yet
- Nagina Cotton Mills Annual Report 2007Document44 pagesNagina Cotton Mills Annual Report 2007Sonia MukhtarNo ratings yet
- Iphoneos 31Document159 pagesIphoneos 31Ivan VeBoNo ratings yet
- Form 709 United States Gift Tax ReturnDocument5 pagesForm 709 United States Gift Tax ReturnBogdan PraščevićNo ratings yet
- Lewis Corporation Case 6-2 - Group 5Document8 pagesLewis Corporation Case 6-2 - Group 5Om Prakash100% (1)
- Prlude No BWV in C MinorDocument3 pagesPrlude No BWV in C MinorFrédéric LemaireNo ratings yet
- Longman ESOL Skills For Life - ShoppingDocument4 pagesLongman ESOL Skills For Life - ShoppingAstri Natalia Permatasari83% (6)
- Simba s7d Long Hole Drill RigDocument2 pagesSimba s7d Long Hole Drill RigJaime Asis LopezNo ratings yet
- Sinclair User 1 Apr 1982Document68 pagesSinclair User 1 Apr 1982JasonWhite99No ratings yet
- What Is A Problem?: Method + Answer SolutionDocument17 pagesWhat Is A Problem?: Method + Answer SolutionShailaMae VillegasNo ratings yet
- EC GATE 2017 Set I Key SolutionDocument21 pagesEC GATE 2017 Set I Key SolutionJeevan Sai MaddiNo ratings yet
- CS709 HandoutsDocument117 pagesCS709 HandoutsalexNo ratings yet
- Case Study IndieDocument6 pagesCase Study IndieDaniel YohannesNo ratings yet
- The Service Marketing Plan On " Expert Personalized Chef": Presented byDocument27 pagesThe Service Marketing Plan On " Expert Personalized Chef": Presented byA.S. ShuvoNo ratings yet
- Alternate Tuning Guide: Bill SetharesDocument96 pagesAlternate Tuning Guide: Bill SetharesPedro de CarvalhoNo ratings yet
- Journals OREF Vs ORIF D3rd RadiusDocument9 pagesJournals OREF Vs ORIF D3rd RadiusironNo ratings yet
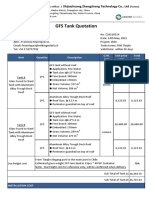
- GFS Tank Quotation C20210514Document4 pagesGFS Tank Quotation C20210514Francisco ManriquezNo ratings yet
- Pipeline Welding SpecificationDocument15 pagesPipeline Welding Specificationaslam.ambNo ratings yet
- Typical T Intersection On Rural Local Road With Left Turn LanesDocument1 pageTypical T Intersection On Rural Local Road With Left Turn Lanesahmed.almakawyNo ratings yet
- PNBONE_mPassbook_134611_6-4-2024_13-4-2024_0053XXXXXXXX00 (1) (1)Document3 pagesPNBONE_mPassbook_134611_6-4-2024_13-4-2024_0053XXXXXXXX00 (1) (1)imtiyaz726492No ratings yet
- Display PDFDocument6 pagesDisplay PDFoneoceannetwork3No ratings yet