You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 1SDA073907R1 E1 2 W FP Iu 1600 3p HR HR PDFDocument3 pages1SDA073907R1 E1 2 W FP Iu 1600 3p HR HR PDFcamiloNo ratings yet
- Nema Motor Data CalculatorDocument19 pagesNema Motor Data Calculatorwado11100% (1)
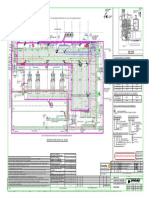
- SS-1 Deep Well Earth PitDocument1 pageSS-1 Deep Well Earth PitM&N ProjectsNo ratings yet
- KSG GranitesDocument3 pagesKSG Granitesshivakumar hiremathNo ratings yet
- Evaluating Selective Coordination Current Limiting Fuses Circuit Breakers Tech TopicDocument8 pagesEvaluating Selective Coordination Current Limiting Fuses Circuit Breakers Tech Topicdejanoski_aNo ratings yet
- Coleman Powermate 5000 Generator Manual Pm052531217 CompressDocument8 pagesColeman Powermate 5000 Generator Manual Pm052531217 CompressJoe reiderNo ratings yet
- Africo Solar - May CatalogueDocument7 pagesAfrico Solar - May CatalogueCarlene Carew0% (1)
- Fast Bus Transfer Systems: A System Solution Approach: Aartech Solonics LTD., Bhopal, IndiaDocument38 pagesFast Bus Transfer Systems: A System Solution Approach: Aartech Solonics LTD., Bhopal, IndiaDurga PrasadNo ratings yet
- Power Systems Study Specifications XXXDocument8 pagesPower Systems Study Specifications XXXharmlesdragonNo ratings yet
- Lucy Electric Sabre - 0920Document70 pagesLucy Electric Sabre - 0920ABCD100% (1)
- Low Voltage CT - catalogue EN - Низковольтные трансформаторы (Польша) PDFDocument12 pagesLow Voltage CT - catalogue EN - Низковольтные трансформаторы (Польша) PDFAgam Rodhi AditiawarmanNo ratings yet
- Vacuum Circuit BreakerDocument6 pagesVacuum Circuit BreakerMd Rodi BidinNo ratings yet
- Siemens Medium Voltage 24kV Gas Insulated Switchgear 8DJH OandMDocument129 pagesSiemens Medium Voltage 24kV Gas Insulated Switchgear 8DJH OandMmichyimNo ratings yet
- UPS Manual OperacionesDocument21 pagesUPS Manual Operacionesjose Alberto uribe MinierNo ratings yet
- Alarm Monitoring and Power ConnectionsDocument22 pagesAlarm Monitoring and Power Connectionsmuhammad deprianNo ratings yet
- Installation of Basic Final Circuits: Conduit or TrunkingDocument37 pagesInstallation of Basic Final Circuits: Conduit or TrunkingbendeniNo ratings yet
- REG615Document8 pagesREG615Himesh NairNo ratings yet
- Load Flow Analysis of ETAP ProjectDocument12 pagesLoad Flow Analysis of ETAP ProjectKM 2 SPENTRINo ratings yet
- Line Impedance calculation and relay setting for grid feedersDocument22 pagesLine Impedance calculation and relay setting for grid feederssathiyaseelanNo ratings yet
- Es Lab Manual Next Exp.Document11 pagesEs Lab Manual Next Exp.AnmolGoyalNo ratings yet
- New Pricelist for Energy ProductsDocument20 pagesNew Pricelist for Energy Productsjcolmosmora5212No ratings yet
- Datasheet - RHI (3 6) K 48ES 5GDocument2 pagesDatasheet - RHI (3 6) K 48ES 5GsisiraNo ratings yet
- ELTEK For Sale From Powerstorm 19nov14Document6 pagesELTEK For Sale From Powerstorm 19nov14MorroJopalNo ratings yet
- Keor Hpe 60 80 GB PDFDocument2 pagesKeor Hpe 60 80 GB PDFUguudei ErdembilegNo ratings yet
- Substation Bus SchemesDocument8 pagesSubstation Bus Schemesabhi_tricalNo ratings yet
- APN-052 Directional Ground-Fault ProtectionDocument17 pagesAPN-052 Directional Ground-Fault ProtectionWalter Andres Estevez VasquezNo ratings yet
- 11-0.433kV, 3500kVA Oil TX PDFDocument1 page11-0.433kV, 3500kVA Oil TX PDFEzany EzNo ratings yet
- LV Cable Commissioning Test ReportDocument1 pageLV Cable Commissioning Test ReportNghiemNo ratings yet
- Auto TransformerDocument7 pagesAuto TransformerPrincess Diane GravidesNo ratings yet
- Generator Grid Connection GuideDocument56 pagesGenerator Grid Connection Guidealways_lucky_oneNo ratings yet