You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Newton's Theory of Universal Gravitation ExplainedDocument30 pagesNewton's Theory of Universal Gravitation ExplainedBR docs0% (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ernst Mayr - Taxonomic Categories in Fossil Hominids - 1950Document19 pagesErnst Mayr - Taxonomic Categories in Fossil Hominids - 1950gabrahNo ratings yet
- Interstellar Molecules - Their Laboratory andDocument241 pagesInterstellar Molecules - Their Laboratory andMiguel Angel MolineroNo ratings yet
- My Star World-Nikola TeslaDocument25 pagesMy Star World-Nikola TeslaHomers Simpson100% (1)
- Tentative Check List of Serbian Microlepidoptera-SMDocument226 pagesTentative Check List of Serbian Microlepidoptera-SMJozef DozsaiNo ratings yet
- SATEM 2002 - Software For Aquifer Test EvaluationDocument148 pagesSATEM 2002 - Software For Aquifer Test EvaluationAlberto RicardoNo ratings yet
- GardenDocument11 pagesGardensakti_badalaNo ratings yet
- Angles, Azimuths, and BearingsDocument16 pagesAngles, Azimuths, and BearingsAhmad KhaledNo ratings yet
- GalileoDocument12 pagesGalileopseudonimNo ratings yet
- Grade 9 Vocabulary WorksheetsDocument3 pagesGrade 9 Vocabulary WorksheetsCharmainNo ratings yet
- The Damned Human Race by Mark TwainDocument2 pagesThe Damned Human Race by Mark TwainSidra Umer86% (7)
- Models of the Universe: A Comparison of Early Astronomical TheoriesDocument2 pagesModels of the Universe: A Comparison of Early Astronomical TheoriesJose BenaventeNo ratings yet
- Manejo de Técnicas Y de Cultivo - : ProccedingsDocument7 pagesManejo de Técnicas Y de Cultivo - : ProccedingsLuis CélineNo ratings yet
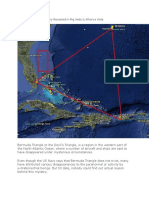
- Bermuda Triangle Mystery Revealed in Rig VedaDocument5 pagesBermuda Triangle Mystery Revealed in Rig Vedasriviseshadri100% (2)
- UG Mine Design for Fishmeri Gold DepositDocument97 pagesUG Mine Design for Fishmeri Gold DepositLiNo ratings yet
- Sofa Ast CDocument81 pagesSofa Ast CDani IbrahimNo ratings yet
- PHD Annexure II-04022020Document21 pagesPHD Annexure II-04022020Nanda KumarNo ratings yet
- De Thi Hoc Sinh Gioi Lop 11 Mon Tieng Anh Hoi Cac Truong Chuyen Khu Vuc Duyen Hai Va Dong Bang Bac Bo Nam 2014Document13 pagesDe Thi Hoc Sinh Gioi Lop 11 Mon Tieng Anh Hoi Cac Truong Chuyen Khu Vuc Duyen Hai Va Dong Bang Bac Bo Nam 2014Chungg AnhhNo ratings yet
- KAS Astrology: How Do You Find The Samdharmi of Rahu or Ketu Using The KAS Program?Document4 pagesKAS Astrology: How Do You Find The Samdharmi of Rahu or Ketu Using The KAS Program?kkkanhaNo ratings yet
- Lab 17 Serial DilutionDocument15 pagesLab 17 Serial DilutionCedricDiehlNo ratings yet
- Galaxy Classification LabDocument10 pagesGalaxy Classification LabAndrewNo ratings yet
- Phylogeny of The Terrestrial IsopodaDocument36 pagesPhylogeny of The Terrestrial IsopodaPedroNo ratings yet
- Cambay Basin IndiaDocument18 pagesCambay Basin IndiaShilpa Patil50% (4)
- Living Things Have To Have A Habitat Kindergarten - Grade 1 Science Lesson Plan John Muir Study GuideDocument4 pagesLiving Things Have To Have A Habitat Kindergarten - Grade 1 Science Lesson Plan John Muir Study GuideKern Kaweah Sierrra ClubNo ratings yet
- Chapter 4 Rock MassDocument22 pagesChapter 4 Rock MassadiblazimNo ratings yet
- Venus Conjunct JupiterDocument52 pagesVenus Conjunct JupiterMamoon Ur RasheedNo ratings yet
- An Introduction to Geotechnical Engineering: Fundamentals and ApplicationsDocument6 pagesAn Introduction to Geotechnical Engineering: Fundamentals and ApplicationsxioNo ratings yet
- How To Time An Event of Dinesh Mathur SABook Review Section BWDocument11 pagesHow To Time An Event of Dinesh Mathur SABook Review Section BWleohimak100% (3)
- Unit Lesson Inner PlanetsDocument25 pagesUnit Lesson Inner PlanetskarleyroyalNo ratings yet