You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Civil Booster Civil Engineering Handbook PDFDocument109 pagesCivil Booster Civil Engineering Handbook PDFAnkit60% (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ASM - Tensile TestingDocument283 pagesASM - Tensile TestingSanthosh Nair83% (6)
- Bottom Failure - Annex K - en 14015 - Rev 3Document3 pagesBottom Failure - Annex K - en 14015 - Rev 3KP SahuNo ratings yet
- Design Calculation Sheet For Fire Lift Well Pressurisation S.NO. DescriptionDocument1 pageDesign Calculation Sheet For Fire Lift Well Pressurisation S.NO. DescriptionpsjjoshiNo ratings yet
- In Line Vs Cross Flow PDFDocument8 pagesIn Line Vs Cross Flow PDFakhmadmarufnurNo ratings yet
- Flare SizingDocument8 pagesFlare SizingRian Intan Saputra100% (1)
- Mec411 NL Chapter1 1Document91 pagesMec411 NL Chapter1 1Naavalan Krishnaga Art'wNo ratings yet
- Modelling of Airflow in Wood Kilns: UBC Mechanical Engineering CFD Modelling Process Simulations LTDDocument75 pagesModelling of Airflow in Wood Kilns: UBC Mechanical Engineering CFD Modelling Process Simulations LTDMô Dion100% (1)
- CBB 2024 Chapter 4-Second Law of Thermo V2Document90 pagesCBB 2024 Chapter 4-Second Law of Thermo V2Ameer Muhammad100% (1)
- Rules of Thumb: Distillation and Gas AbsorptionDocument3 pagesRules of Thumb: Distillation and Gas AbsorptionMartin Joseph Dela CruzNo ratings yet
- SUMSEM-2021-22 - MEE2003 - ETH - VL2021220701593 - Reference - Material - II - 19-08-2022 - Air ConditioningDocument15 pagesSUMSEM-2021-22 - MEE2003 - ETH - VL2021220701593 - Reference - Material - II - 19-08-2022 - Air ConditioningNikhil SaraswathNo ratings yet
- Nzee Storage TanksDocument13 pagesNzee Storage Tanksvttrlc100% (1)
- Lecture4 PDFDocument21 pagesLecture4 PDFCarlos Aparisi CanteroNo ratings yet
- Structural Analysis-II PDFDocument2 pagesStructural Analysis-II PDFHarikrishnan TNo ratings yet
- Contoh WATER COOLED MAGNETIC BEARING CHILLERDocument1 pageContoh WATER COOLED MAGNETIC BEARING CHILLERsitiNo ratings yet
- Nbs Building Science 138Document180 pagesNbs Building Science 138Deviprasad B SNo ratings yet
- Measurement of Lift and Drag of An Aerofoil at Different Angles of AttackDocument10 pagesMeasurement of Lift and Drag of An Aerofoil at Different Angles of AttackSidrak MekuriaNo ratings yet
- LEP1301 - 01 Hooke's Law PDFDocument5 pagesLEP1301 - 01 Hooke's Law PDFJose GalvanNo ratings yet
- Computers and Geotechnics 2017 PDFDocument24 pagesComputers and Geotechnics 2017 PDFAyman ABEDNo ratings yet
- Organic Rankine CycleDocument4 pagesOrganic Rankine CycleMilos MilosavljevicNo ratings yet
- Thermo BookDocument145 pagesThermo BookShahla GondalNo ratings yet
- Practice Problems Gas and Power CyclesDocument1 pagePractice Problems Gas and Power CyclesMerlyn AytonaNo ratings yet
- Mon Aug 07 23:46:17 2017 Case: C:/... /hysys Prarancangann Pabrik N-Butil Asetat Kapasitas 10000 Ton Per Tahun - HSC Flowsheet: Case (Main)Document1 pageMon Aug 07 23:46:17 2017 Case: C:/... /hysys Prarancangann Pabrik N-Butil Asetat Kapasitas 10000 Ton Per Tahun - HSC Flowsheet: Case (Main)Ikhsan FoldismeNo ratings yet
- Atterberg's Limits: College of Engineering Civil Engineering Department Soil NCE 412Document29 pagesAtterberg's Limits: College of Engineering Civil Engineering Department Soil NCE 412MarkNo ratings yet
- EtaNorm Curva SDocument174 pagesEtaNorm Curva Sseht94No ratings yet
- Stress Waves in Solids, Transmission, Reflection and Interaction andDocument10 pagesStress Waves in Solids, Transmission, Reflection and Interaction andBrijeshNo ratings yet
- Analisis Struktur C2Document18 pagesAnalisis Struktur C2Hazyema HarunNo ratings yet
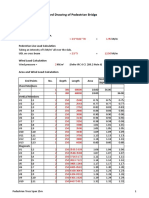
- Preparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsDocument19 pagesPreparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsRoshan KejariwalNo ratings yet
- Lecture Five Energy BalancesDocument51 pagesLecture Five Energy BalancesHebron DawitNo ratings yet
- Valvoline HTO 32Document1 pageValvoline HTO 32octo widodoNo ratings yet