You might also like
- Permanent Magnet Synchronous MachineDocument7 pagesPermanent Magnet Synchronous MachineSantiago DavidNo ratings yet
- Low Freq Simulation 2013Document33 pagesLow Freq Simulation 2013teomondoNo ratings yet
- Optical Ring-Coupler Simulation Using CST MICROWAVE STUDIODocument3 pagesOptical Ring-Coupler Simulation Using CST MICROWAVE STUDIONgô Cự MạnhNo ratings yet
- Eetop - CN ESD Simulation Talk 5-2-2 CST Ugm 2011Document17 pagesEetop - CN ESD Simulation Talk 5-2-2 CST Ugm 2011Văn CôngNo ratings yet
- CST Thermal1Document16 pagesCST Thermal1Edison Andres Zapata OchoaNo ratings yet
- Recent Research Results by Using CST Microwave Studio at Antenna Lab., POSTECHDocument15 pagesRecent Research Results by Using CST Microwave Studio at Antenna Lab., POSTECHdevmaa2007No ratings yet
- Ac Resistance Evaluation of Foil, Round and Litz Conductors in Magnetic ComponentsDocument74 pagesAc Resistance Evaluation of Foil, Round and Litz Conductors in Magnetic ComponentsRodrigo CunhaNo ratings yet
- Low Frequency Electro Magnetic Design and Simulation: CST em StudioDocument2 pagesLow Frequency Electro Magnetic Design and Simulation: CST em StudioTotostyle AmrNo ratings yet
- MPI Computing GuideDocument13 pagesMPI Computing GuideThilaga MohanNo ratings yet
- Photonic Crystal Cavities: Nanophotonics and Integrated OpticsDocument8 pagesPhotonic Crystal Cavities: Nanophotonics and Integrated OpticsMax Marcano CamposNo ratings yet
- HighSpeed ElectronicsDocument62 pagesHighSpeed Electronicsfet_50No ratings yet
- CST Magic Tee Workflow1Document19 pagesCST Magic Tee Workflow1trsureshNo ratings yet
- CST EM STUDIO - Workflow and Solver OverviewDocument92 pagesCST EM STUDIO - Workflow and Solver OverviewSofiano SofianeNo ratings yet
- CST Tutorial MicrostripDocument23 pagesCST Tutorial MicrostripTfNo ratings yet
- MESYS Shaft CalculationDocument28 pagesMESYS Shaft CalculationZoebairNo ratings yet
- Customized Post Processing Using The Result Template ConceptDocument13 pagesCustomized Post Processing Using The Result Template ConceptshochstNo ratings yet
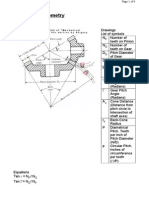
- Bevel ExplanationDocument4 pagesBevel ExplanationVarun VaidyaNo ratings yet
- CST Application Note Designing Phased Array AntennaDocument6 pagesCST Application Note Designing Phased Array AntennaMertKarahanNo ratings yet
- Is 14812 2005Document12 pagesIs 14812 2005JayDeep KhajureNo ratings yet
- Subroutine For Cohesive ElementDocument41 pagesSubroutine For Cohesive ElementBhushanRaj100% (1)
- Modal Space - in Our Own Little World: by Pete AvitabileDocument2 pagesModal Space - in Our Own Little World: by Pete AvitabileVignesh SelvarajNo ratings yet
- Bevel GearDocument17 pagesBevel Gearparesh09No ratings yet
- Fatigue Behavior of Materials Under Strain Cycling in Low and Intermediate Life Range PDFDocument58 pagesFatigue Behavior of Materials Under Strain Cycling in Low and Intermediate Life Range PDFLeonardo TerraNo ratings yet
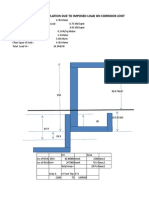
- Deflection Calculation Due To Imposed Load On Corridor JoistDocument14 pagesDeflection Calculation Due To Imposed Load On Corridor JoistranjitNo ratings yet
- Bond-Slip Model For Detailed Finite-Element AnalysisDocument10 pagesBond-Slip Model For Detailed Finite-Element AnalysisSilver rayleighNo ratings yet
- 2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFDocument12 pages2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFvlad lupasteanuNo ratings yet
- Project PPT - FinalDocument12 pagesProject PPT - FinalPrashant JagdaleNo ratings yet
- Random Vibration SpectraDocument4 pagesRandom Vibration Spectracombatps1No ratings yet
- Heat Chap05 043Document28 pagesHeat Chap05 043Kerem GönceNo ratings yet
- G 2Hz MeaningDocument3 pagesG 2Hz MeaningSriram Venkataramanan100% (1)
- Printed Dipole Antenna With Integrated BalunDocument3 pagesPrinted Dipole Antenna With Integrated Balunsaandeep1177No ratings yet
- Beam Deflection - Theory PDFDocument2 pagesBeam Deflection - Theory PDFHaikal HakimNo ratings yet
- Excellent Thesis On Damping Measurements PDFDocument283 pagesExcellent Thesis On Damping Measurements PDFconcord1103No ratings yet
- Pressure Vessel Inspection ReportDocument33 pagesPressure Vessel Inspection ReportJinlong SuNo ratings yet
- Lug Analysis MechaniCalcDocument29 pagesLug Analysis MechaniCalcOSCARDELTANo ratings yet
- Understanding The Physics of Electrodynamic Shaker Performance by G.F. Lang and D. SnyderDocument10 pagesUnderstanding The Physics of Electrodynamic Shaker Performance by G.F. Lang and D. Snydermohamedabbas_us3813No ratings yet
- 3 3 1 Optical Applications With CST MICROWAVE STUDIODocument36 pages3 3 1 Optical Applications With CST MICROWAVE STUDIOmsajjad_68No ratings yet
- Study of Rotor-Bearing Systems Using Campbell DiagramDocument4 pagesStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggNo ratings yet
- Faraday Rings Voice Coil ImpedanceDocument37 pagesFaraday Rings Voice Coil ImpedanceMatthew MillerNo ratings yet
- Random Vibration 845826Document22 pagesRandom Vibration 845826yash pradhanNo ratings yet
- Response Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Document15 pagesResponse Spectrum Analysis As Per Indian IS: 1893 (Part 1) - 2002Anonymous UibQYvc6No ratings yet
- Brochure EM3DS 12Document2 pagesBrochure EM3DS 12dmfa061No ratings yet
- Terminal Report ShredderDocument25 pagesTerminal Report ShredderEnriv YasiladNo ratings yet
- Patch Antenna Design Using MICROWAVE STUDIODocument5 pagesPatch Antenna Design Using MICROWAVE STUDIOnehajnitNo ratings yet
- CST PresentationDocument17 pagesCST PresentationRezmerita FlorinNo ratings yet
- Design-II, 2016 Bevel Gear Design ProcedureDocument1 pageDesign-II, 2016 Bevel Gear Design ProcedureenggsantuNo ratings yet
- Ie3d SSD DsDocument2 pagesIe3d SSD Dsblzz2netNo ratings yet
- Strain Gauge LectureDocument48 pagesStrain Gauge LectureSridhar Kanagaraj100% (1)
- Water Cooled Axial Flux Motor High TorqueDocument7 pagesWater Cooled Axial Flux Motor High TorqueSteven SullivanNo ratings yet
- Product Data: Impact Hammer - Type 8202Document4 pagesProduct Data: Impact Hammer - Type 8202sadettinorhanNo ratings yet
- Improved Algorithm For MIMO Antenna MeasurementDocument24 pagesImproved Algorithm For MIMO Antenna MeasurementHenry DoNo ratings yet
- Assignment 5 - Y-Joint FatigueDocument5 pagesAssignment 5 - Y-Joint Fatiguenallay17050% (1)
- CST Whitepaper Magnetron CST WebDocument8 pagesCST Whitepaper Magnetron CST WebGiancarloRichardRivadeneyraMirandaNo ratings yet
- (PAPER (Automotive CAE Durability Analysis Using Random Vibration ApproachDocument16 pages(PAPER (Automotive CAE Durability Analysis Using Random Vibration ApproachThiago PalmieriNo ratings yet
- Electromagnetic Simulation of A Switched Reluctance MotorDocument3 pagesElectromagnetic Simulation of A Switched Reluctance MotorAdrian David ScottNo ratings yet
- Sarac 2016Document7 pagesSarac 2016Marko_DelNo ratings yet
- Materi Narasumber Pak Tajuddin NurDocument26 pagesMateri Narasumber Pak Tajuddin Nurnadiah auliaNo ratings yet
- BDC Torque Vs Advance AngleDocument12 pagesBDC Torque Vs Advance AngleAhmet Yasin BaltacıNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Owner's Manual: Main FeaturesDocument1 pageOwner's Manual: Main FeaturesAdrian David ScottNo ratings yet
- Boss Catalog 2014Document14 pagesBoss Catalog 2014SilviaXuCarvalhoNo ratings yet
- Boss Catalog 2008Document23 pagesBoss Catalog 2008palacheinsNo ratings yet
- BOSS GuitarEffects GuideBook Vol17 PDFDocument40 pagesBOSS GuitarEffects GuideBook Vol17 PDFFrancisco Correa100% (1)
- Electromagnetic Simulation of A Switched Reluctance MotorDocument3 pagesElectromagnetic Simulation of A Switched Reluctance MotorAdrian David ScottNo ratings yet
- Design of Ridged Waveguides by Hofer PDFDocument10 pagesDesign of Ridged Waveguides by Hofer PDFవేలుసామి లింగాసామిNo ratings yet
- Sheet 2Document5 pagesSheet 2Hmbs HrNo ratings yet
- Wet Alarm Pressure Switch PS10Document4 pagesWet Alarm Pressure Switch PS10asimnaqvi2008No ratings yet
- Enclosure B154 Technical DescriptionDocument22 pagesEnclosure B154 Technical DescriptionUmowa SmieciowaNo ratings yet
- Chapter 3 - Corrosion ThermodynamicsDocument34 pagesChapter 3 - Corrosion ThermodynamicsEDU Academic Programs CoordinatorNo ratings yet
- Cicd 3Document6 pagesCicd 3c13786616No ratings yet
- Equivalent Circuit of Transformer Referred To PrimaryDocument5 pagesEquivalent Circuit of Transformer Referred To PrimaryGideon Moyo100% (1)
- Star Library List Etap 12.6Document207 pagesStar Library List Etap 12.6José ChavarriaNo ratings yet
- NER NER: Cable Duct To Electrical BuildingDocument1 pageNER NER: Cable Duct To Electrical Buildingsartaj100% (1)
- Installation Instructions: If in Doubt About Electrical Installation, Consult A Licensed Electrician!Document1 pageInstallation Instructions: If in Doubt About Electrical Installation, Consult A Licensed Electrician!dayshift5No ratings yet
- MPPT Techniques For PV Systems Under Different Scenarios: ReviewDocument6 pagesMPPT Techniques For PV Systems Under Different Scenarios: ReviewAnurag KumarNo ratings yet
- Manual: Mach3 Usb Card NvumDocument39 pagesManual: Mach3 Usb Card NvumJuan0% (1)
- ABB Technical Guide To IEC61439 - QT11Document84 pagesABB Technical Guide To IEC61439 - QT11hahahih100% (3)
- W 5105 H - InstalareDocument40 pagesW 5105 H - InstalareMarius Costan0% (1)
- Electric Field Distribution in Glass and Porcelain Pin InsulatorDocument5 pagesElectric Field Distribution in Glass and Porcelain Pin Insulatoremmanuel799No ratings yet
- Jeac PDFDocument13 pagesJeac PDFIshfaq AhmadNo ratings yet
- Re30058-Amplifier CardDocument16 pagesRe30058-Amplifier CardJamin SmtpngNo ratings yet
- Jackson 1.6 Homework Problem SolutionDocument4 pagesJackson 1.6 Homework Problem SolutionSukhmander SinghNo ratings yet
- Ex01 PDFDocument2 pagesEx01 PDFGavie MarquosNo ratings yet
- 2018 Gantry Crane Lighting - SpreadDocument15 pages2018 Gantry Crane Lighting - SpreadOscar Acevedo MirandaNo ratings yet
- 2M-Ans. - Fibre Optics & Laser Instruments - AnswerDocument26 pages2M-Ans. - Fibre Optics & Laser Instruments - Answersowmiya100% (1)
- 3238018C10MDocument8 pages3238018C10MAlbita PintoNo ratings yet
- Security System With User Changeable PasswordDocument15 pagesSecurity System With User Changeable PasswordPraveen KrishnaNo ratings yet
- Control TheoryDocument2 pagesControl Theorycjdbbt1No ratings yet
- Lab 6 Studying The Accumulate-Released Oscillator Circuit Using The Neon Light To Measure The Resistance and The CapacitanceDocument41 pagesLab 6 Studying The Accumulate-Released Oscillator Circuit Using The Neon Light To Measure The Resistance and The CapacitanceDuy TrầnNo ratings yet
- Limitation of KCL KVLDocument1 pageLimitation of KCL KVLSeijuro AkashiNo ratings yet
- Hach Sc100 Controller User ManualDocument64 pagesHach Sc100 Controller User ManualAndreea TrandafirNo ratings yet
- Design Simulation For A 3 Phase Grid Connected PV Inverter in Simulink PDFDocument9 pagesDesign Simulation For A 3 Phase Grid Connected PV Inverter in Simulink PDFNguyen KhoaNo ratings yet
- DB Erq-Aw1 2014 PDFDocument39 pagesDB Erq-Aw1 2014 PDFSlobodan BanicNo ratings yet