Professional Documents
Culture Documents
U1ef - Perez Romo - Jose de Jesus
Uploaded by
Jesús PérezOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
U1ef - Perez Romo - Jose de Jesus
Uploaded by
Jesús PérezCopyright:
Available Formats
Unidad I: Teora y Conceptos Bsicos de Control Clsico
Universidad Pol i t c n i c a d e A g u a s - UP080293 c a l i e n t e s jose.perez@alumnos.upa.edu.mx, perezromo.josedejesus@hotmail.com
Ingeniera Mecatrnica
Control Clsico 2012-01 MTR07C 17/01/2012
Jos de Jess Prez Romo
Prof.: M.C. Luis Guillermo Guerrero Daz de Len
guillermo.guerrero@upa.edu.mx Evidencias de la primera unidad de aprendizaje del programa acadmico de la asignatura del Control Clsico ciclo 2012-01, como parte de la Evaluacin Formativa. Competencia: que el alumno identifique un sistema de control, sus componentes y clasificacin.
CONTROL CLSICO RBRICA DE EVIDENCIAS PRIMER UNIDAD DE APRENDIZAJE 1. Objetivo: Realizar la investigacin de conceptos tericos bsicos relacionados a control clsico. 2. Desarrollo: Investigue los siguientes temas: Sistemas de control (8 puntos) Clasificacin de los sistemas de control (8 puntos) Componentes de un sistema de control automtico (8 puntos) Modelos matemticos de los sistemas de control (8 puntos) Error en estado estable (8 puntos) Efecto de las perturbaciones (8 puntos) Sensibilidad al cambio en los componentes (8 puntos) Estabilidad de los sistemas de control (8 puntos) Ventajas y desventajas de los sistemas de control en lazo cerrado (8 puntos) Tcnicas utilizadas en el anlisis y diseo de sistemas de control (8 puntos) 3. Bibliografa: [1] K. Ogata, Ingeniera de Control Moderna, Tercera ed., Mxico: Pearson Educacin, 1998, pp. 3-11. [2] W. Bolton, Ingeniera de Control, Segunda ed., F. J. Rodrguez Cruz y M. d. C. Solano del Moral, Edits., Mxico: Alfaomega, 2001, pp. 1-187. [3] Universidad Nacional de Colombia sede Manizales, Teora de Sistemas, 29 Septiembre 2009. [En lnea]. Available: http://www.virtual.unal.edu.co/cursos/sedes/manizales/4060001/Contenido/CAPITULO%202%20Concepto%20de%20sistemas/Pages/Clasificacion.htm. [ltimo acceso: 9 Enero 2012]. [4] M. . F. Aquiles Gay, Sistemas de Control, 9 Octubre 2011. [En lnea]. Available: http://www.tecneweb.com.ar/Apuntes/tercero_9/Sistemadecontrol.htm. [ltimo acceso: 9 Enero 2012]. [5] B. C. Kuo, Sistemas de Control Automtico, Sptima ed., L. G. Cedeo Plascencia, Ed., Nueva York: Prentice Hall, 1996, pp. 1-19. (10 puntos) (10 puntos)
M.C. Luis Guillermo Guerrero Daz de Len
Control Clsico Enero-Abril 2012
UNIDAD I: TEORA Y CONCEPTOS BSICOS DE CONTROL CLSICO
CONTENIDO
1. 2. 3. Sistemas de Control ....................................................................................................................................................... 4 Clasificacin de los Sistemas de Control ...................................................................................................................... 4 Componentes de un Sistema de Control Automtico .................................................................................................. 6 3.1. 3.2. 4. 5. 6. 7. 8. 9. Elementos bsicos de un sistema en lazo abierto ................................................................................................ 6 Elementos bsicos de un sistema de control en lazo cerrado .............................................................................. 7
Modelos Matemticos de los Sistemas de Control ....................................................................................................... 8 Error en Estado Estable ................................................................................................................................................ 9 Efecto de las Perturbaciones ......................................................................................................................................... 9 Sensibilidad a Cambios en los Componentes ............................................................................................................... 9 Estabilidad de los Sistemas de Control ........................................................................................................................ 9 Ventajas y Desventajas de los Sistemas en Lazo Cerrado vs. Lazo Abierto ............................................................ 11
10. Tcnicas Usadas en el Anlisis y Diseo de Sistemas de Control ........................................................................... 11 Bibliografa ........................................................................................................................................................................... 12
Fig. 1. Subsistema de un sistema de control en lazo abierto. ............................................................................................. 7 Fig. 2. Subsistemas en un sistema de control en lazo cerrado............................................................................................ 8 Fig. 3. Realimentacin positiva y realimentacin negativa. ............................................................................................... 8 Fig. 4. Sistemas crticamente amortiguados, sobreamortiguados y subamortiguados. .................................................. 10
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico
1.
SISTEMAS DE CONTROL
Sistemas. Un sistema es una combinacin de componentes que actan juntos y realizan un objetivo determinado. Un sistema no necesariamente es fsico. El concepto de sistema se aplica a fenmenos abstractos y dinmicos, tales como los que se encuentran en la economa. Por tanto, la palabra sistema debe interpretarse como una implicacin de sistemas fsicos, biolgicos, econmicos y similares [1, p. 3]. El termino sistema se emplea para describir un conjunto de componentes que interactan, alrededor de los cuales se dibuja una frontera imaginaria, de modo que slo es de inters la interaccin entre la entrada o entradas y su salida o salidas sin necesidad de estudiar en detalle las interacciones entre los componentes que lo forman [2, p. 1]. Un sistema de control es aquel en el que la salida del sistema se controla para tener un valor especifico o cambiarlo, segn lo determina la entrada al sistema [2, p. 3].
2.
CLASIFICACIN DE LOS SISTEMAS DE CONTROL
La clasificacin de un sistema al igual que el anlisis de los aspectos del mismo es un proceso subjetivo; depende del individuo que lo hace, del objetivo que se persigue y de las circunstancias particulares en las cuales se desarrolla. En este punto se dan lineamientos generales sobre las diferentes clases de sistemas y algunos ejemplos que corresponden a su definicin, pero puede haber debate sobre los mismos si se tiene en cuenta las consideraciones expuestas antes [3]. De acuerdo con el planteamiento de Alba (1995), los sistemas se clasifican as: Segn su relacin con el medio ambiente: Sistemas abiertos: Sistema que intercambia materia, energa o informacin con el ambiente. Ejemplos: Clula, ser humano, ciudad, perro, televisor, familia, estacin de radio. Sistemas cerrados: Sistema que no intercambia materia, energa o informacin con el ambiente. Ejemplos: Universo, reloj desechable, llanta de carro. Segn su naturaleza: Sistemas concretos: Sistema fsico o tangible. 17 de enero de 2012 Ejemplos: Equipo de sonido, edificio, pjaro, guitarra, elefante. Sistemas abstractos: Sistema simblico o conceptual. Ejemplos: Sistema hexadecimal, idioma espaol, lgica difusa.
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico Segn su origen: Sistemas naturales: Sistema generado por la naturaleza. Ejemplos: Ro, bosque, molcula de agua. Sistemas artificiales: Sistema producto de la actividad humana; son concebidos y construidos por el hombre. Ejemplos: Tren, avin, marcapasos, idioma ingls. Segn sus relaciones: Sistemas simples: Sistema con pocos elementos y relaciones. Ejemplos: Juego de billar, pndulo, f(x) = x + 1, palanca. Sistemas complejos: Sistema con numerosos elementos y relaciones entre ellos. Ejemplos: Cerebro, universidad, cmara fotogrfica. Esta clasificacin es relativa porque depende del nmero de elementos y relaciones considerados. En la prctica y con base en lmites sicolgicos de la percepcin y comprensin humanas, un sistema con ms o menos siete elementos y relaciones se puede considerar simple. Segn su cambio en el tiempo: Sistemas estticos: Sistema que no cambia en el tiempo. Ejemplos: Piedra, vaso de plstico, montaa. Sistemas dinmicos: Sistema que cambia en el tiempo. Ejemplos: Universo, tomo, la tierra, hongo. Esta clasificacin es relativa porque depende del periodo de tiempo definido para el anlisis del sistema. Segn el tipo de variables que lo definen: Sistemas discretos: Sistema definido por variables discretas. Ejemplos: lgica booleana, alfabeto. Sistemas continuos: Sistema definido por variables continuas. Ejemplos: alternador, ro.
17 de enero de 2012
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico Otras clasificaciones: Sistemas jerrquicos: Sistema cuyos elementos estn relacionados mediante relaciones de dependencia o subordinacin conformando un organizacin por niveles. Chiavenato (1999) los denomina sistemas piramidales. Ejemplos: Gobierno de una ciudad. Sistemas de control: Sistema jerrquico en el cual unos elementos son controlados por otros. Ejemplos: Lmpara. Sistemas de control con retroalimentacin: Sistema de control en el cual los elementos controlados envan informacin sobre su estado a los elementos controladores. Ejemplos: Termostato. Para agregar una clasificacin diferente se toma de Chiavenato (1999) una organizacin basada en el funcionamiento de los sistemas: Sistemas determinsticos: Sistema con un comportamiento previsible. Ejemplos: Palanca, polea, programa de computador. Sistemas probabilsticos: Sistema con un comportamiento no previsible. Ejemplos: Clima, mosca, sistema econmico mundial. En el libro Teora General de Sistemas, van Gigch (1987) plantea que los sistemas pueden clasificarse as: Sistemas vivientes y no vivientes: Los sistemas vivientes estn dotados de funciones biolgicas como el nacimiento, la muerte y la reproduccin. Sistemas abstractos y concretos: Un sistema abstracto es aquel en que todos sus elementos son conceptos. Un sistema concreto es aquel en el que por lo menos dos de sus elementos son objetos o sujetos, o ambos. Sistemas abiertos y cerrados: Un sistema cerrado es un sistema que no tiene medio, es decir, no hay sistemas externos que lo violen, o a travs del cual ningn sistema externo ser considerado. Un sistema abierto es aquel que posee medio, es decir, posee otros sistemas con los cuales se relaciona, intercambia y comunica.
3. 3.1.
COMPONENTES DE UN SISTEMA DE CONTROL AUTOMTICO ELEMENTOS BSICOS DE UN SISTEMA EN LAZO ABIERTO
Se puede considerar que un sistema en lazo abierto consiste en algunos subsistemas bsicos []. Estos elementos pueden ser distintos, equipos separados, pero todas las funciones que cumple cada sistema se debe preser-
17 de enero de 2012
Existen dos formas bsicas de sistemas de control, una es la denominada en lazo abierto y la otra en lazo cerrado. Con un sistema en lazo abierto la entrada se elige con base en la experiencia que se tiene con dichos sistemas para producir el valor de salida requerido. Esta salida, sin embargo, no se ve modificada por el cambio en las condiciones de operacin externas []. Con un sistema de control en lazo cerrado se tiene una seal de realimentacin hacia la entrada desde la salida, la cual se utiliza para modificar la entrada de modo que la salida se mantenga constante a pesar de los cambios en las condiciones de operacin [2, p. 4].
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico var. La entrada global al sistema es una seal, que, basada en experiencias anteriores, es probable que conduzca a la salida requerida [2, p. 6]. Los subsistemas son: 1. Elemento de control. Este elemento determina que accin se va a tomar dada una entrada al sistema de control. 2. Elemento de correccin. Este elemento responde a la entrada que viene del elemento de control e inicia la accin para producir el cambio en la variable controlada al valor requerido. 3. Proceso. El proceso o planta es el sistema en el que se va a controlar la variable.
Controlador Entrada, Salida,
Elemento de control
seal que se espera que produzca la salida
Elemento de correccin
Proceso
variable controlada
Fig. 1. Subsistema de un sistema de control en lazo abierto.
3.2.
ELEMENTOS BSICOS DE UN SISTEMA DE CONTROL EN LAZO CERRADO
Los elementos que conforman un sistema en lazo cerrado pueden o no ser partes distintas o equipos separados, pero todas las funciones de los subsistemas estarn presentes. La entrada global al sistema de control es el valor requerido de la variable y la salida es el valor real de la variable [2, p. 8]. 1. Elemento de comparacin. Este elemento compara el valor requerido o de referencia de la variable por controlar con el valor medido de lo que se obtiene a la salida y produce una seal de error la cual indica la diferencia del valor obtenido a la salida y el valor requerido.
17 de enero de 2012
2. Elemento de control. Este elemento decide que accin tomar cuando se recibe una seal de error. A menudo se utiliza el trmino controlador para un elemento que incorpora el elemento de control y la unidad de correccin. 3. Elemento de correccin. Este elemento se utiliza para producir un cambio en el proceso al eliminar el error y con frecuencia se denomina actuador. 4. Elemento de proceso. El proceso, o planta, es el sistema donde se va a controlar la variable. 5. Elemento de medicin. Este elemento produce una seal relacionada con la condicin de la variable controlada, y proporciona la seal de realimentacin al elemento de comparacin para determinar si hay o no error.
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico
Fig. 2. Subsistemas en un sistema de control en lazo cerrado.
Se entiende por realimentacin el hecho de reinyectar a la entrada de un sistema una parte (o una funcin) de la salida, por medio de la seal de realimentacin. En un sistema se dice que hay realimentacin (o retroalimentacin) cuando, a travs de un circuito llamado lazo (o bucle) de realimentacin, la salida acta sobre la entrada, Fig. 3. Existen dos tipos de realimentacin: realimentacin positiva y realimentacin negativa: Hay realimentacin positiva cuando un aumento de la seal de realimentacin provoca un aumento de la salida del sistema. La realimentacin positiva aumenta la divergencia y generalmente conduce a la inestabilidad del sistema (bloqueo o destruccin). Hay realimentacin negativa cuando un aumento de la seal de realimentacin provoca una disminucin de la salida del sistema. La realimentacin negativa favorece la convergencia hacia un fin, y conduce a la estabilidad, en otras palabras tiende a mantener el equilibrio de los sistemas, sean stos artificiales (elctricos, mecnicos, trmicos, etc.), o naturales (homeostticos, etc.) [4].
Fig. 3. Realimentacin positiva y realimentacin negativa.
4.
MODELOS MATEMTICOS DE LOS SISTEMAS DE CONTROL
Un modelo matemtico de un sistema es una rplica de las relaciones entre entrada y salida o entre entradas y salidas. Las relaciones reales entre la entrada y la salida de un sistema se sustituyen por expresiones matemticas [2, p. 18]. Las bases de cualquier modelo matemtico provienen de las leyes fsicas fundamentales que gobiernan el comportamiento de un elemento [2, p. 36].
17 de enero de 2012
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico Para muchos sistemas existen relaciones lineales razonables entre la entrada y la salida. Esto significa que la salida es proporcional a la entrada y si la entrada se duplica, entonces la salida tambin se duplica, es decir, si la entrada se multiplica por una constante multiplicativa, entonces la salida se multiplica por la misma constante. Esto tambin quiere decir que si la entrada 1 produce una salida 1, y la entrada 2 produce la salida 2, entonces una entrada igual a la suma de las entradas 1 y 2, producir una salida igual a la suma de las salidas 1 y 2 [2, p. 18]. Segn Bolton (2001), se denomina la condicion de estado estable cuando el sistema ha tenido suficiente tiempo para asentarse ante cualquier cambio en la entrada. En general, se puede definir a la funcin de transferencia como el cociente de la salida en estado estable entre la entrada en estado estable para un sistema o subsistema [2, p. 19].
5.
ERROR EN ESTADO ESTABLE
El error en estado estable E de un sistema es la diferencia entre la salida del sistema y su entrada cuando las condiciones estn en estado estable [2, p. 24]. Este error es una medida de la exactitud de un sistema de control a seguir una entrada de comando y es el error despus de que decaen todas las respuestas transitorias a la entrada []. Depende del sistema en cuestin y de la forma que tome la entrada el sistema [2, p. 167].
6.
EFECTO DE LAS PERTURBACIONES
Todos los sistemas fsicos estn sujetos a algunos tipos de seales exgenas o ruido durante su operacin. Ejemplo de estas seales son el voltaje de ruido trmico en circuitos electrnicos y el ruido de conmutacin en motores elctricos. Las perturbaciones externas, tal como el viento que acta sobre una antena, son tambin muy comunes en sistemas de control. Por tanto, en el diseo de sistemas de control, se deben dar consideraciones para que el sistema sea insensible a ruido y perturbaciones externas y sensible a comandos de entrada [5, p. 14]. Una consideracin importante con un sistema de control es el efecto de cualquier perturbacin [2, p. 27]. Una perturbacin es una seal que tiende a afectar negativamente el valor de la salida de un sistema. Si la perturbacin se genera dentro del sistema se denomina interna, en tanto que una perturbacin externa se produce fuera del sistema y es una entrada [1, p. 3].
7.
SENSIBILIDAD A CAMBIOS EN LOS COMPONENTES
17 de enero de 2012
Los cambios en las caractersticas de estos elementos con el tiempo y las condiciones ambientales pueden resultar en un cambio en la funcin de transferencia [2, p. 30].
8.
ESTABILIDAD DE LOS SISTEMAS DE CONTROL
La estabilidad es una nocin que describe si un sistema es capaz de seguir el comando de entrada o, en general, si dicho sistema es til. En una forma rigurosa, un sistema se dice inestable si sus salidas salen de control [5, p. 12].
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico Un sistema es estable si cuando es sujeto a una entrada o perturbacin acotada entonces la salida es acotada. Una entrada o salida acotada es la que tiene una magnitud finita []. La condicin de estabilidad tambin se puede expresar como que un sistema es estable si al excitarlo con un impulso la salida regresa eventualmente a cero [2, p. 31]. Los sistemas de control en lazo abierto son inherentemente estables. Una entrada finita produce una salida finita y que en forma indefinida no cambia con el tiempo. Al incrementar la funcin de transferencia de un elemento en tales sistemas no tiene efecto en la estabilidad del propio sistema []. No obstante, los sistemas en lazo cerrado pueden mostrar inestabilidad que se puede presentar como resultado de tiempos de retardo que ocurren entre el cambio en la variable y la seal de realimentacin que resulta de la respuesta del sistema [2, p. 32]. De manera alternativa, un sistema se puede definir como estable si al estar sujeto a una entrada impulso la salida tiende a cero a medida que el tiempo tiende a infinito. Si, al responder a la entrada impulso, la salida del sistema tiende a infinito, entonces el sistema se vuelve inestable. Sin embargo, si la salida no tiende a cero o no crece a infinito pero tiende a un valor finito diferente de cero, se dice entonces que el sistema es crtica o marginalmente estable [2, p. 182]. La estabilidad de un sistema se puede determinar considerando como cambia la salida con el tiempo despus de una entrada impulso. Con un sistema estable la salida deber tender a cero con el tiempo, y con un sistema inestable la salida crecer con el tiempo [2, p. 187].
10
Fig. 4. Sistemas crticamente amortiguados, sobreamortiguados y subamortiguados.
17 de enero de 2012
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico
11
9.
VENTAJAS Y DESVENTAJAS DE LOS SISTEMAS EN LAZO CERRADO VS. LAZO ABIERTO
Las ventajas de tener una trayectoria de realimentacin y por lo tanto, un sistema en lazo cerrado en lugar de un sistema en lazo abierto se puede resumir de la manera siguiente: 1. 2. 3. 4. Ms exacto en la igualacin de los valores real y requerido para la variable. Menos sensible a las perturbaciones. Menos sensible a cambios en las caractersticas de los componentes. La velocidad de respuesta se incrementa y, por lo tanto, el ancho de banda es mayor, es decir, el intervalo de frecuencias en los que el sistema responder. Pero hay algunas desventajas: 1. Hay una prdida de ganancia en cuanto a que la funcin de transferencia de un sistema en lazo abierto, se reduce de G a G/(1 + GH ) por una trayectoria de realimentacin con una funcin de transferencia H. 2. Existe una gran posibilidad de inestabilidad. 3. El sistema es ms complejo y. por lo tanto, no solo ms caro, sino ms propenso a descomposturas [2, p. 33].
10. TCNICAS USADAS EN EL ANLISIS Y DISEO DE SISTEMAS DE CONTROL
El elemento de control tiene como una entrada la seal de error y como salida una seal que se convierte en la entrada a la unidad de correccin de modo que se puede iniciar la accin para que se pueda eliminar el error []. Con sistemas de control en lazo abierto los tipos de control ms probables son el de dos posiciones (encendidoapagado o mejor conocido como on-off) o secuencias o acciones conmutadas por tiempo []. Con sistemas de control en lazo cerrado los tipos de control son a menudo el control de dos posiciones, el control proporcional o el control proporcional combinado con algn refinamiento. Con el modo de control de dos posiciones, la seal de error de entrada al elemento de control es una salida de encendido o de apagado, que se utiliza para encender o apagar al elemento de correccin [2, p. 15]. Con el control proporcional la salida del elemento de control es una seal, la cual es proporcional al error: cuanto mayor sea el error, mayor ser la salida. Esto significa que el elemento de correccin recibir una seal que depende de la magnitud de la correccin que se necesite []. Debido a que el control proporcional por si solo puede presentar algunos problemas, con frecuencia se combina con otras formas de control. Existe el control derivativo, donde la salida es proporcional a la razn de cambio de la seal de error, y el control integral, donde la salida en el tiempo t es proporcional a la integral a la seal de error entre t = 0 y t [2, p. 16]. 17 de enero de 2012
Universidad Politcnica de Aguascalientes Unidad I:Teora y Conceptos Bsicos de Control Clsico
12
BIBLIOGRAFA
[1] K. Ogata, Ingeniera de Control Moderna, Tercera ed., Mxico: Pearson Educacin, 1998, pp. 3-11.
[2] W. Bolton, Ingeniera de Control, Segunda ed., F. J. Rodrguez Cruz y M. d. C. Solano del Moral, Edits., Mxico: Alfaomega, 2001, pp. 1-187.
[3] Universidad Nacional de Colombia sede Manizales, Teora de Sistemas, 29 Septiembre 2009. [En lnea]. Available: http://www.virtual.unal.edu.co/cursos/sedes/manizales/4060001/Contenido/CAPITULO%202%20Concepto%20de%20sistemas/Pages/Clasificacion.htm. [ltimo acceso: 9 Enero 2012].
[4] M. . F. Aquiles Gay, Sistemas de Control, 9 Octubre 2011. [En lnea]. Available: http://www.tecneweb.com.ar/Apuntes/tercero_9/Sistemadecontrol.htm. [ltimo acceso: 9 Enero 2012].
[5] B. C. Kuo, Sistemas de Control Automtico, Sptima ed., L. G. Cedeo Plascencia, Ed., Nueva York: Prentice Hall, 1996, pp. 1-19.
17 de enero de 2012
You might also like
- Chevrolet Corsa - Manual Del UsuarioDocument185 pagesChevrolet Corsa - Manual Del UsuarioAlfredo Oscar Cecconi100% (3)
- U3ep1 Perezromo JosedejesusDocument12 pagesU3ep1 Perezromo JosedejesusJesús PérezNo ratings yet
- ROBOT Jugador de FutbolDocument24 pagesROBOT Jugador de FutbolJesús PérezNo ratings yet
- Evalaucion Por Competencias UPA2012 para AlumnosDocument10 pagesEvalaucion Por Competencias UPA2012 para AlumnosJesús PérezNo ratings yet
- Perez S17Document11 pagesPerez S17Jesús PérezNo ratings yet
- Equilibrio IonicoDocument23 pagesEquilibrio IonicoFroilan CanquiNo ratings yet
- TerremotosDocument8 pagesTerremotosGabriela ViñaNo ratings yet
- Procedimiento para Determinar La Ubicacion de Un Funcionamiento IncorrectoDocument5 pagesProcedimiento para Determinar La Ubicacion de Un Funcionamiento IncorrectoRepuestos MaceiraNo ratings yet
- I. Resumen: Falta Cuanto Vaelen Las Viscosidades Reales, Porcentajes de Diferencia (Error) de Otros TrabajosDocument14 pagesI. Resumen: Falta Cuanto Vaelen Las Viscosidades Reales, Porcentajes de Diferencia (Error) de Otros TrabajosKatherin Diaz DiazNo ratings yet
- Mantenimiento 40 60CV 4T-4 PDFDocument23 pagesMantenimiento 40 60CV 4T-4 PDFNicoNo ratings yet
- Examen FluidosDocument21 pagesExamen FluidosKristhiam Alendez QuispitupaNo ratings yet
- Conificación de Gas y de AguaDocument21 pagesConificación de Gas y de AguaBlog Petrolero100% (2)
- Algebra Relacional PDFDocument25 pagesAlgebra Relacional PDFUrielNo ratings yet
- Extraccion DatosDocument9 pagesExtraccion DatosJavier PinzónNo ratings yet
- Inspeccion A OficinasDocument1 pageInspeccion A Oficinasleo limpiasNo ratings yet
- Trabajo de Investigacion de BiotecnologiaDocument68 pagesTrabajo de Investigacion de BiotecnologiaAna Cristina Huamani AguilarNo ratings yet
- Memoria Descriptiva RancasDocument72 pagesMemoria Descriptiva RancasKeth DarkNo ratings yet
- Reporte Díario 23-09-21 Pte GanranDocument19 pagesReporte Díario 23-09-21 Pte GanranLENINNo ratings yet
- Proyecto de Bioingenieria 1Document6 pagesProyecto de Bioingenieria 1Kevin López Clopatofsky EscdNo ratings yet
- Repuestos Criticos 2Document8 pagesRepuestos Criticos 2Gustavo A. Utreras FariasNo ratings yet
- MenagrafíaDocument16 pagesMenagrafíaChristian Ramírez LiraNo ratings yet
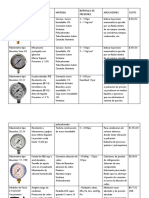
- MANÓMETROSDocument4 pagesMANÓMETROSMonse AndradeNo ratings yet
- Datos para Formalizacion de EmpresaDocument4 pagesDatos para Formalizacion de EmpresaJordy Panta SaldarriagaNo ratings yet
- Sistema de Referenciacion de Documentos en Las AAPP-V8Document17 pagesSistema de Referenciacion de Documentos en Las AAPP-V8juancampo2000No ratings yet
- Investigación Unidad 2Document6 pagesInvestigación Unidad 2Itzel López EugenioNo ratings yet
- Brochure Gdata Mayor It PDFDocument1 pageBrochure Gdata Mayor It PDFraagcomoNo ratings yet
- Breve Diccionario Ingles TecnicoDocument38 pagesBreve Diccionario Ingles TecnicojuanNo ratings yet
- Cuestionario 2Document2 pagesCuestionario 2maria rodriguezNo ratings yet
- Método Estándar de Prueba para Resistencia de Abrasión de Hormigón Por Voladura de ArenaDocument9 pagesMétodo Estándar de Prueba para Resistencia de Abrasión de Hormigón Por Voladura de ArenaDaniel Enacarnacion PatracaNo ratings yet
- Monografia BsdaDocument23 pagesMonografia BsdaDARWIN BRAULIO QUESO MAMANINo ratings yet
- Eeid Eeid-319 FormatoalumnotrabajofinalDocument15 pagesEeid Eeid-319 FormatoalumnotrabajofinalIvan DianderasNo ratings yet
- PRACTICA 2do PARCIALDocument5 pagesPRACTICA 2do PARCIALjuanNo ratings yet
- HOPSA - Manual de Techos N°3 PDFDocument18 pagesHOPSA - Manual de Techos N°3 PDFLuis LopezNo ratings yet
- Como Hacer Jabon Casero Con Aceite UsadoDocument2 pagesComo Hacer Jabon Casero Con Aceite UsadoJuan Jose Corbalan IbañezNo ratings yet